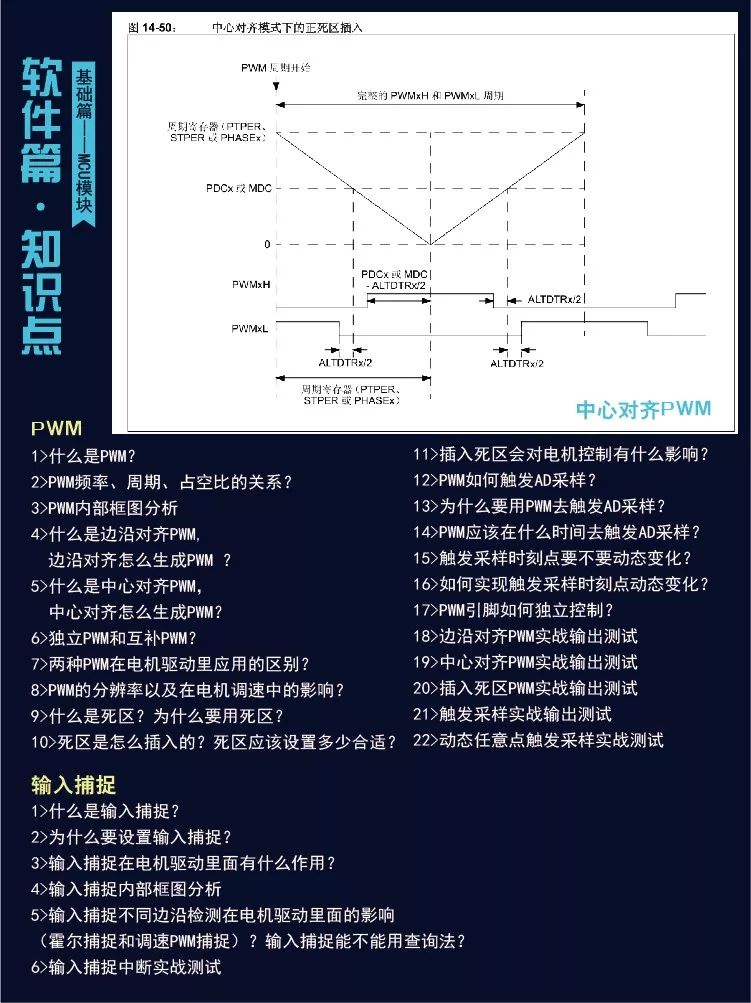
 LDC電機可以根據應用要求采用邊排列或中心排列PWM信號
LDC電機可以根據應用要求采用邊排列或中心排列PWM信號
無刷電機屬于自換流型(自我方向轉換),因此控制起來更加復雜。BLDC電機控制要求了解電機進行整流轉向的轉子位置和機制。對于閉環速度控制,有兩個附加要求,即對于轉子速度/或電機電流以及PWM信號進行測量,以控制電機速度功率。
BLDC電機可以根據應用要求采用邊排列或中心排列PWM信號。大多數應用僅要求速度變化操作,將采用6個獨立的邊排列PWM信號。這就提供了最高的分辨率。如果應用要求服務器定位、能耗制動或動力倒轉,推薦使用補充的中心排列PWM信號。
許多不同的控制算法都被用以提供對于BLDC電機的控制。典型地,將功率晶體管用作線性穩壓器來控制電機電壓。當驅動高功率電機時,這種方法并不實用。高功率電機必須采用PWM控制,并要求一個微控制器來提供起動和控制功能。
控制算法必須提供下列三項功能:
用于控制電機速度的PWM電壓
用于對電機進整流換向的機制
利用反電動勢或霍爾傳感器來預測轉子位置的方法
脈沖寬度調制僅用于將可變電壓應用到電機繞組。有效電壓與PWM占空度成正比。當得到適當的整流換向時,BLDC的扭矩速度特性與以下直流電機相同。可以用可變電壓來控制電機的速度和可變轉矩。
功率晶體管的換向實現了定子中的適當繞組,可根據轉子位置生成最佳的轉矩。在一個BLDC電機中,MCU必須知道轉子的位置并能夠在恰當的時間進行整流換向。
FOC技術與普通馬達驅動技術的優勢在哪?
■無刷直流電機(BLDC)既繼承了直流電機良好的調速性能,能夠在重負載的情況下,實現均勻、平滑的無級調速,又避免了傳統的有刷直流電機進行電刷摩擦換向所導致的電機接觸不良、不發電等一系列問題,因此越來越受到人們的關注。
■ 目前市場主流的無刷直流電機的控制方式有3種:FOC、方波控制(也稱為梯形波控制、120°控制、6步換向控制)和正弦波控制,三種控制方式各有優勢。
■方波控制方式的優點是控制算法簡單、硬件成本較低,使用性能普通的控制器便能獲得較高的電機轉速。而缺點是轉矩波動大、存在一定的電流噪聲、效率達不到最大值,所以方波控制適用于對電機轉動性能要求不高的場合。
■正弦波控制實現了電壓矢量的控制,間接實現了電流大小的控制,但是無法控制電流的方向。FOC控制方式可以認為是正弦波控制的升級版本,實現了電流矢量的控制,也即實現了電機定子磁場的矢量控制。
■FOC控制按照電機有無傳感器(一般為編碼器)來區分可以分為有感FOC和無感FOC,前者通過傳感器反饋電機轉子的位置信息,控制相對簡單,但對控制性能要求較高。后者由于電機不帶任何傳感器,所以在控制中需要通過采集電機相電流,使用位置估算算法來計算轉子位置,所以控制難度較大,但是它可以避免傳感器故障的風險,并且省去了傳感器的成本,同時簡化了電機與驅動板間的布線。
■大量的電機控制應用一直在持續不斷地尋求提高效率同時降低系統成本的方法,這是兩個推動改進現有電機控制技術的主要因素,所以在中、低成本應用中,效率是使得FOC比標量和梯形控制方法更受歡迎的另一個原因。
FOC技術與市面上FOC技術的優勢與特色
■FOC 需要復雜的數學算法,這對于普通設計人員來說可能并不熟悉,所以在過去,設計師們通常依賴于復雜的數字訊號處理 (DSP) 芯片來實現無傳感器FOC。
■而且目前關于FOC技術而言,雖然有多家芯片制造商開發了專用于電機控制的芯片,而且也應用他們的芯片實現了FOC電機控制的相關算法,但是他們的FOC電機控制算法并沒有完全開源,只是提供了一個函數API供用戶使用。也有一些國內的芯片廠商將FOC控制相關的模塊使用硬件的方式集成在了芯片內部,用戶只需要去配置一些相關的寄存器就可以使用FOC算法來控制電機。而且也有一些公司也確實是使用了以上的方式應用到了相應項目中。
■但是,在目前的市面上沒有真正達到開源FOC算法的廠家。絕大多數工程師并沒有了解FOC電機控制算法,也沒法自己獨立的去編寫相關代碼,僅僅只是局限于對原有非核心代碼的小修小補來完成項目的開發。
■而我們本次線上班的目的就是完全解決上面的瓶頸,讓大家不再只會調用相關函數API接口,我們的所有代碼不調用任何庫函數,讓大家真正學會如何自己去編寫FOC算法里面的代碼,知道每條代碼的含義。還會帶領大家一起把相關算法的理論全部推導一遍,比如SVPWM算法、滑模觀測器算法等,讓大家知其然還要知其所以然。
■本次線上班采用視頻加輔導的形式,學員自己白天先觀看老師錄制的教學視頻,如果學員對視頻中有不是太明白的地方,晚上老師會在群里跟學員們互動,帶領大家把當天的課程中的問題解決掉。
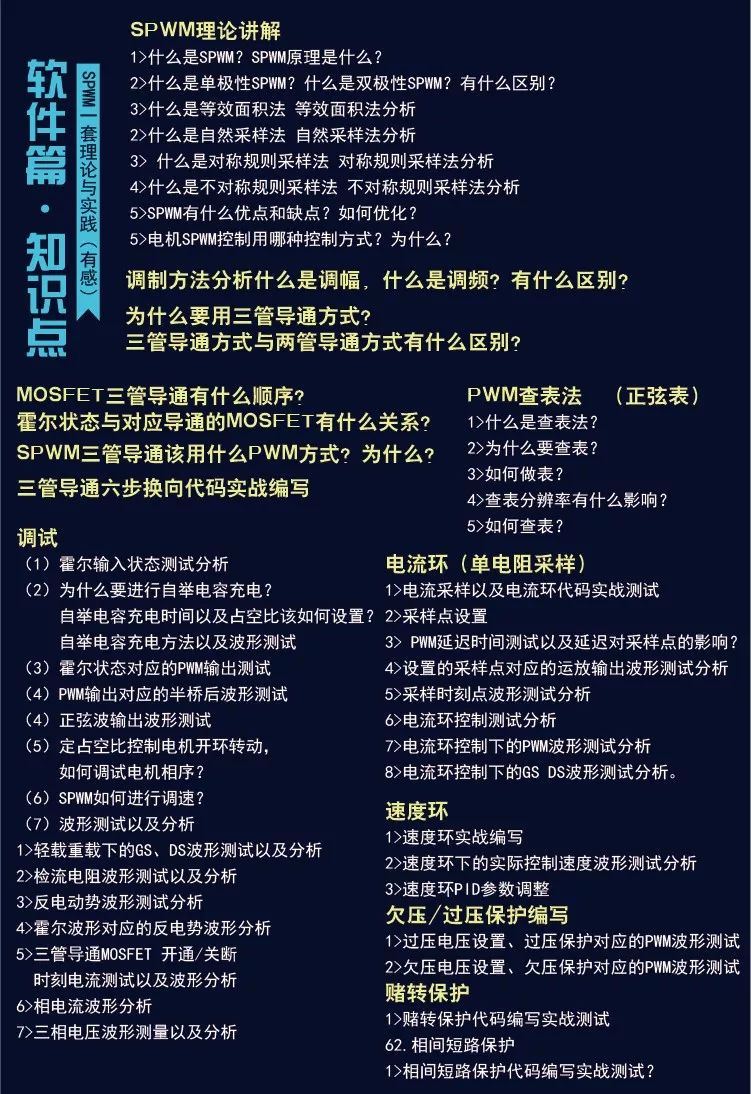
FOC線上班知識要點




FOC開發板的展示、原理圖、pcb、實物、代碼
原理圖

pcb圖
實物圖
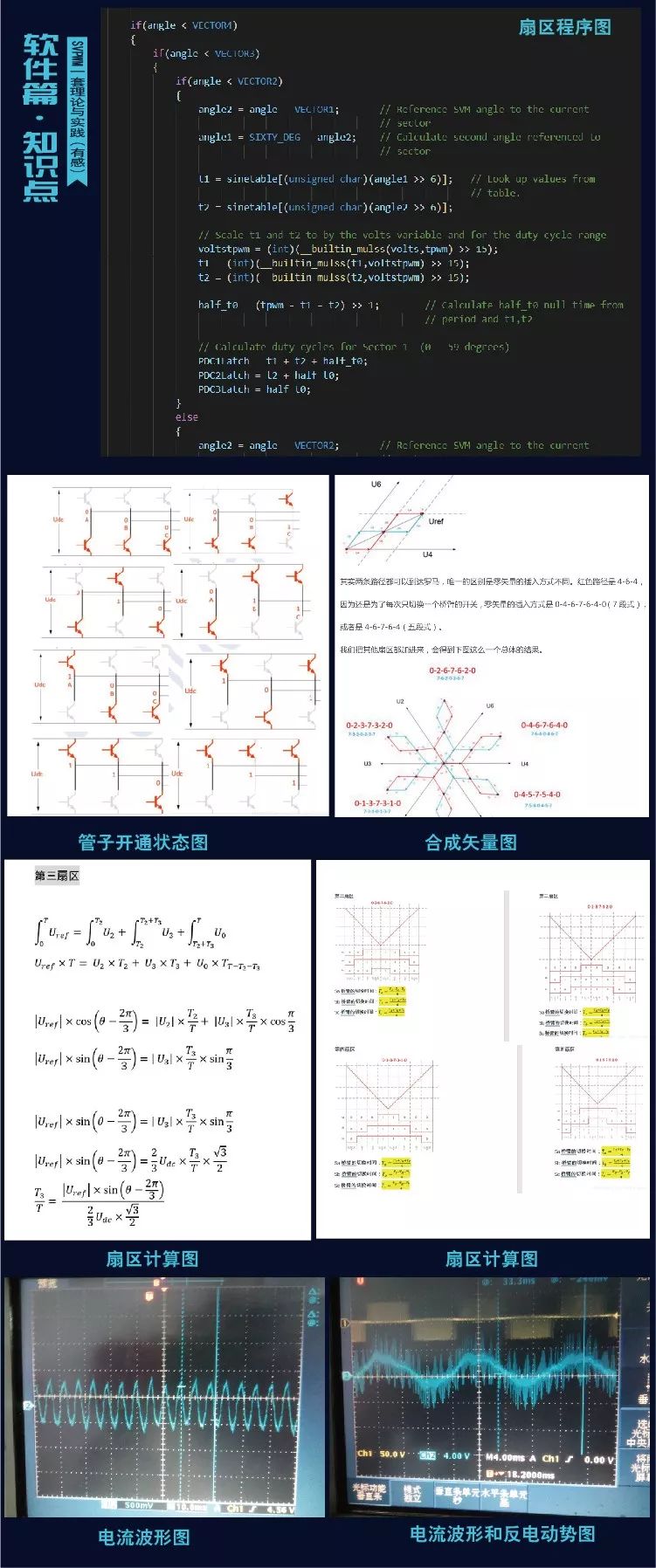
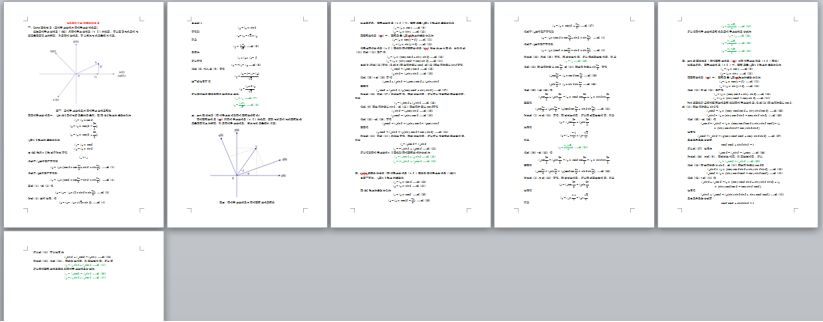
SVPWM算法推導

滑模觀測結構圖
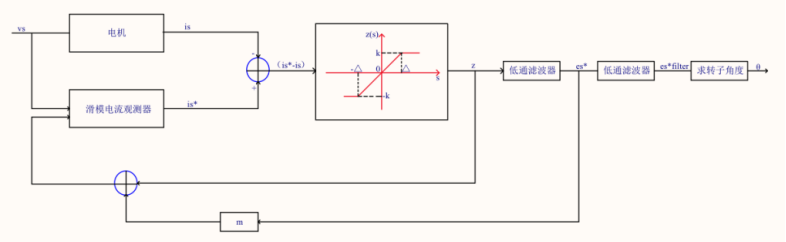
滑模觀測器理論推導
坐標變換推導
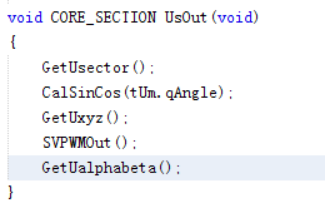
SVPWM算法函數
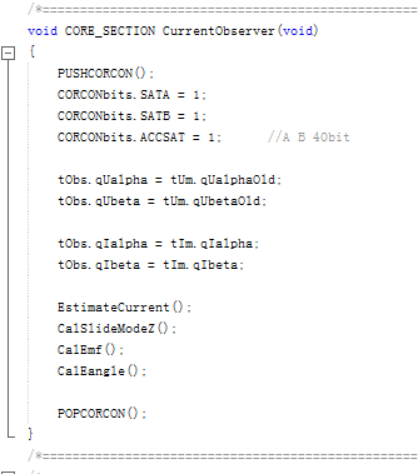
滑模觀測器算法函數
FOC相關波形圖
三相定子電壓波形
Ealpha、Ebeta與位置角
PWM生成的馬鞍波
PWM生成的馬鞍波
Ua、Ub、Uc經CLARKE變化為Ualpha、Ubeta
定子電流矢量角與轉子位置角
電機開環啟動電流
電機開環切閉環過程
電機閉環電流波形(空載)
-
電機控制
+關注
關注
3536文章
1880瀏覽量
268905 -
BLDC
+關注
關注
206文章
802瀏覽量
96985 -
控制算法
+關注
關注
4文章
166瀏覽量
21737
原文標題:BLDC電機控制算法這三點,至關重要!
文章出處:【微信號:fcsde-sh,微信公眾號:fcsde-sh】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
如何調試和測試PWM信號 PWM和PWM信號產生器的區別
PWM控制器的工作原理 PWM信號在電機驅動中的應用
一文了解USB引腳排列







 工商網監
工商網監
評論