 KUKA-8.3系統力矩監控學習技術報使用方法分析
KUKA-8.3系統力矩監控學習技術報使用方法分析
G_Koll_Interface()
CMD_SEL,PAR1,PAR2,PAR3,PAR4,PAR5,PAR6,PAR7,PAR8,PAR9
P1 1學習位置/2 力矩監控
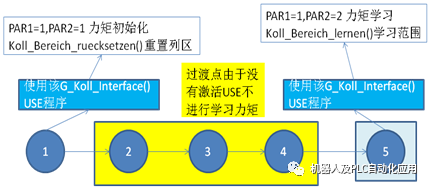
1. 學習前要先新進行初始化 .
2. 機器人在進行學習力矩時,只針對調用USE軌跡點的力矩測量值,這些值只對改軌跡點有效,其他軌跡點不能使用 .
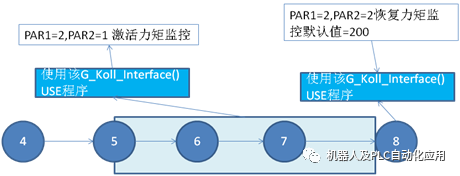
開啟力監控后,力矩監控值對之后的軌跡點都有效果, 力矩監控變量$TORQMON會始終影響后面的軌跡點,直到將力矩監控值恢復默認值200.
ASE #USR_ADV
Advance
Modus=PAR2 模式 1初始/2激活
Bereich=PAR3 存儲區
CASE #USR_TRIG
Trig
;
Modus=PAR2
Bereich=PAR3
;
SWITCH PAR1
CASE 1
;學習驅動器碰撞扭矩降低
IF($MODE_OP==#EX) AND ($OV_PRO==100)THEN
IF(PAR2==2)THEN;終點
Koll_Bereich_lernen()學習范圍
在進行學習力矩時,要注意學習的力矩范圍,力矩的測量值只針對使用USE的當前軌跡,因此想使用的機器人軌跡力矩要與當前測量點吻合。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28466瀏覽量
207295 -
力矩
+關注
關注
0文章
29瀏覽量
9756
原文標題:KUKA-8.3系統力矩監控學習技術報使用方法分析
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
安科瑞Acrel-1000DP分布式光伏監控系統在8.3MWp分布式光伏發電中的應用
安科瑞分布式光伏監控系統在上海汽車變速器有限公司 8.3MWp分布式光伏發電項目中的應用
發表于 12-16 15:03
?0次下載

基于LSTM神經網絡的情感分析方法
情感分析是自然語言處理(NLP)領域的一項重要任務,旨在識別和提取文本中的主觀信息,如情感傾向、情感強度等。隨著深度學習技術的發展,基于LSTM(長短期記憶)神經網絡的情感分析


TensorFlow的定義和使用方法
數據流圖,從而簡化機器學習模型的構建、訓練和部署。自2015年11月開源以來,TensorFlow迅速成為數據科學家、軟件開發者以及教育工作者廣泛使用的工具,廣泛應用于圖像識別、自然語言處理、推薦系統等多個領域。本文將深入解讀TensorFlow的定義、
現場總線的使用方法與注意事項
現場總線是工業自動化領域中的關鍵技術之一,它通過單一的總線連接多個設備,實現設備間的數據交換和通信,為工業自動化系統的控制、管理和監控提供了極大的便利。然而,為了充分發揮現場總線的優勢,確保
功率分析儀的使用方法和注意事項
功率分析儀是一種用于測量電能參數的專業儀器,廣泛應用于電力系統、電力設備測試、能效評估等領域。它通過對高精度電壓、電流信號的采集,得到高精度的功率等相關數值,為工程師和技術人員提供了強大的測量和
相位噪聲分析儀的使用方法和注意事項
相位噪聲分析儀是一種用于測量信號相位噪聲的專用儀器,在通信、雷達、衛星導航等領域具有廣泛的應用。相位噪聲分析儀的精確測量對于保證通信系統的穩定性和可靠性至關重要。本文將詳細介紹相位噪聲分析
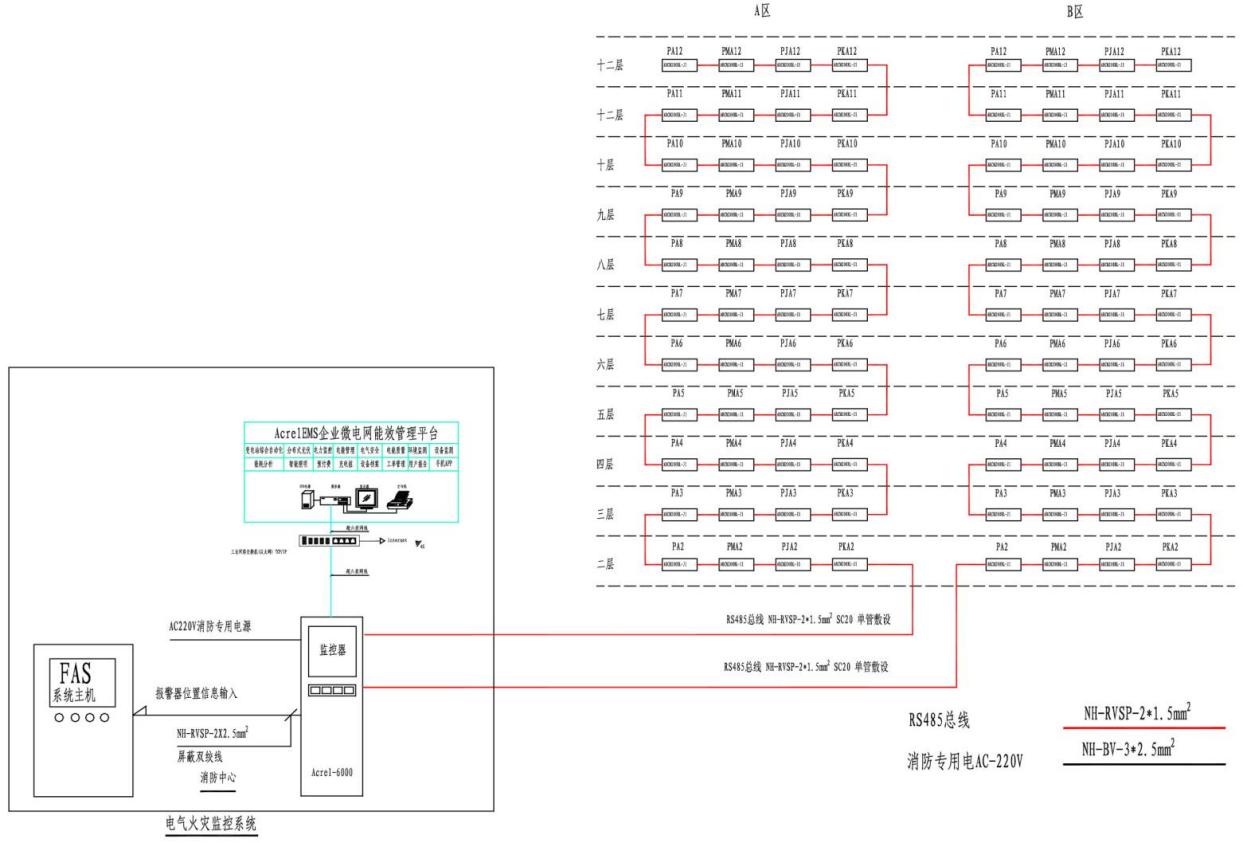
電氣火災監控系統行業技術應用現狀
電氣火災監控系統行業技術應用現狀 張穎姣 安科瑞電氣股份有限公司? 上海嘉定 201801 摘要:我國現有的電氣火災監控系統的應用效果不佳,
集成芯片的使用方法
需要注意的是,不同類型的集成芯片具有不同的使用方法和功能,因此在實際應用中,需要仔細閱讀芯片的數據手冊和相關文檔,了解其具體的使用要求和步驟。此外,對于復雜的電路設計和系統應用,可能需要具備相應的電子技術和專業知識。





 工商網監
工商網監
評論