 如何有效分揀測試中遇到的bug?
如何有效分揀測試中遇到的bug?
研發自動駕駛的核心就是開發新的駕駛技能,然后測試該技能。測試中如果發現了問題,再逐一攻克。
而問題是,工程師們往往只擅長寫代碼,卻忽視了通過測試找到代碼中的問題。花一個月時間做好了一個新的駕駛技能,就以為萬事大吉了。車一旦上路,問題(bug)卻層出不窮。
其實,出了bug沒關系,最重要的是要充分利用發現的bug,挖掘bug的根源,才能有效修復,避免再犯。
這就涉及到triage的學問。Triage字面意思是指對問題進行分揀,其實也泛指對問題尋根溯源(root-causing),也包括分揀時所需的工具。
傳統互聯網的triage過程相對比較簡單,代碼的層級不會太深。比如,一個對外鏈接斷了,八成是因為那個鏈接已經挪了地方。
而自動駕駛則復雜很多。肉眼可見的只有那輛車以及坐在車里可以體驗到的乘坐感受。背后卻有成百上千個代碼組成部分,每一個組成部分內部又有多層分級。一旦自動駕駛車出現問題,很難馬上判斷出到底是哪里需要修改。
比如,肉眼所看到的是,自動駕駛車沒能及時躲避一位正在過馬路的行人。這可能是攝像頭的問題,可能是雷達的問題,可能是行為預測的問題,可能是定位的問題,也可能是高精地圖的問題,等等。因此,我們需要一個高效、嚴謹的過程,快速找到bug根源。
我們可以將triage分為三個階段。
1. Bug識別
2. Bug分揀
3. Bug追根溯源
第一階段:Bug識別
發現bug的最直接方式就是在路上測試,然后將錯誤標注出來。準確的標注可以讓工程師更快了解bug的類別。比如使用“突然剎車”、“偏離車道”這些關鍵詞。
然而,大部分的bug很難通過駕駛直接體現出來。如果代碼里有100個bug,很可能在駕駛中只能體現出兩三個。有的bug只能在特定情境下才會被觸發,平時不會被發現。而且有的bug可以被重現,有的則不能。今天在某個地方突然剎車,明天這個問題可能又沒了。
因此,必須首先盡量將減少測試中的變量,不要等到上路測試才發現bug。比如,如果利用仿真進行測試,就可以對變量進行有效地控制,快速確認bug。
Bug識別的工具也有很多,比如可以通過指標報表,某項指標一旦發生變化,就報錯。也可以通過各種前端工具,將車的探測結果進行可視化,錯誤就能一目了然。
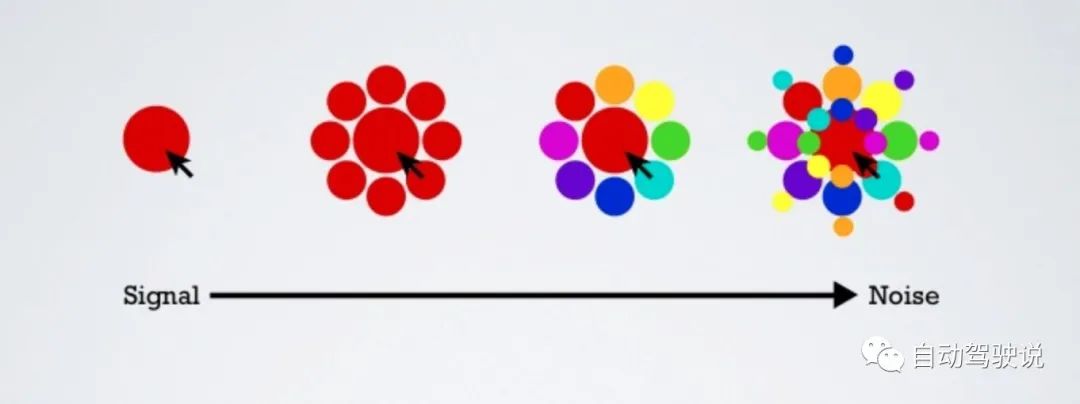
讓系統自動報錯雖然省時省力,但問題是,報錯的數據中往往有很多雜音(noise),報告100個bug,其中也許只有幾個是真正有價值的bug。因此,報錯系統必須不斷提升,才能提高信噪比(signal-to-noise ratio)。
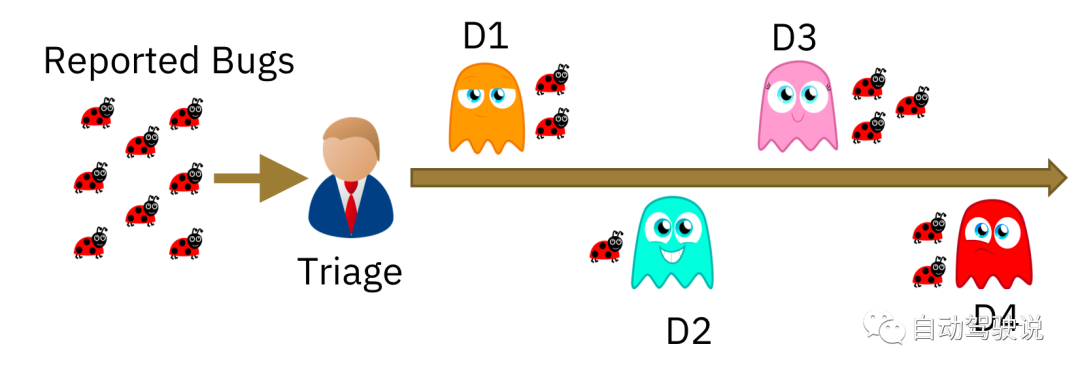
第二階段:Bug分揀
團隊越大,bug分揀就越困難。假設一家公司里同時有二十個團隊在過去一個月里碰過代碼,那么如果出現了問題,這二十個團隊就都有可能承擔責任。如果不去對bug進行分揀,每遇到一個bug就讓所有團隊研究一次bug,會浪費很多工程師的寶貴時間。
因此,負責分揀bug的人必須對各個團隊的業務了如指掌,幫助工程師對bug進行分揀。至少做到將bug及時分發到對應的小組手上,從而節省各個團隊的的時間。
分揀bug時往往需要一些基本的決策樹,比如,如果看到了某種現象,那么bug的原因就一定是A或B。再根據另一種現象,可以推斷出一定是B。隨著代碼不斷更新,這個決策樹也需要不斷更新。
Bug分揀之后,要對bug的重要等級進行排序。并不是所有的bug都需要馬上被修正。根據團隊在當下階段的主要目標,比如該季度中自動駕駛車左轉的bug最為重要,就要把和左轉有關的bug找出來,視為priority 1。
第三階段:Bug追根溯源
Bug分配到正確的團隊的手上之后,就需要被追根溯源,看看根本問題到底出現在哪里。越復雜的bug牽扯出來的問題就會越多,根本原因也埋得越深,修正所需要的時間也越長。
針對相對容易的bug,效率就是一切。如果容易的bug都修復不了,就會拖其他復雜bug的后腿,bug越積越多,最終造成惡性循環。因此,團隊必須在控制代碼質量的基礎上,遵守定時修復bug的流程。
因為一些bug修正起來太困難,所以很多團隊會選擇進行“熱修復”,即hotfix,而不去從根本上解決問題。Hotfix什么時候該用,什么時候不該用,也需要各個團隊做到統一。否則代碼的核心質量無法保證。
其實,很多bug的根本問題不在于技術本身,而在于公司團隊的組織架構設計不合理,或是高層的技術決策出現失誤。團隊的領導者要認清事實,敢于及時止損。
-
代碼
+關注
關注
30文章
4823瀏覽量
68904 -
BUG
+關注
關注
0文章
155瀏覽量
15696 -
自動駕駛
+關注
關注
784文章
13923瀏覽量
166837
原文標題:如何有效分揀測試中遇到的bug?
文章出處:【微信號:zidongjiashishuo,微信公眾號:自動駕駛說】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
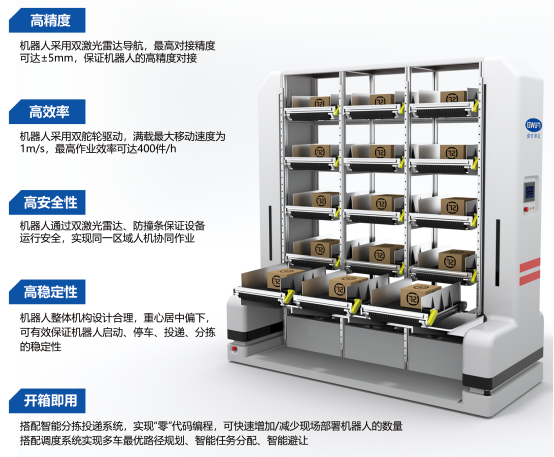
MR30分布式 IO 在物流分揀線的卓越應用
半導體在熱測試中遇到的問題
OTDR測試中常遇到的問題及解決
創新驅動,助力物流行業高效分揀

快遞分揀設備物聯網數據采集系統
明達Mbox網關重塑分揀線的高效與智能

自動分揀設備實時監控管理系統方案
智能分揀投遞機器人
使用VCA810過程中遇到的一些問題求解
蘭寶工業智能讀碼器在物流行業的貨物自動分揀方面的應用

stm32H7 HAL庫中存在的bug
工業一體機在智能分揀中的應用

【BUG收集】為昕原理圖設計EDA軟件(Jupiter)免費評測活動常見問題及BUG收集
變頻器在自動化分揀系統中的關鍵作用與應用






 工商網監
工商網監
評論