


1 引言
隨著測(cè)試設(shè)備的飛速發(fā)展,其性能狀況越來越受到人們的重視,經(jīng)過一段時(shí)間要對(duì)測(cè)試設(shè)備進(jìn)行檢測(cè)。主測(cè)試板作為測(cè)試設(shè)備上的重要部件,它的性能好壞起著重要作用。在對(duì)其進(jìn)行性能測(cè)試時(shí),由于沒有專用的信號(hào)源,一般都是安裝在設(shè)備上進(jìn)行試驗(yàn)。這不僅費(fèi)時(shí)費(fèi)力,而且更重要的是增加了修理成本,因此,迫切需要專用的測(cè)試設(shè)備。本信號(hào)源就是針對(duì)這一問題而設(shè)計(jì)的。
2 信號(hào)源的設(shè)計(jì)要求
根據(jù)對(duì)多數(shù)測(cè)試設(shè)備修理試驗(yàn)工藝的分析,該信號(hào)源具體要求如下:
四路電壓信號(hào):一路電壓范圍為-25 V~25 V的直流信號(hào)源,精度要求為:0 V~1 V的誤差為±0.1V,1 V~25 V的誤差為±0.05 V,-25 V~0 V的誤差為±0.15 V;其中一路產(chǎn)生幅值為0 V~25 V的方波,幅值誤差為±0.2 V,頻率誤差為1 Hz;
一路電壓范圍為-100 mV~100 mV的直流信號(hào)源,要求誤差為±0.5 mV;
一路電壓范圍為-0.5 V~0.5 V的直流信號(hào)源,要求誤差為±0.005 V;
一路電壓范圍為0 V~5 V的直流信號(hào)源,要求誤差為0.01 V。
四路模擬溫度信號(hào)。
3 系統(tǒng)硬件設(shè)計(jì)
3.1 信號(hào)源硬件設(shè)計(jì)及工作過程
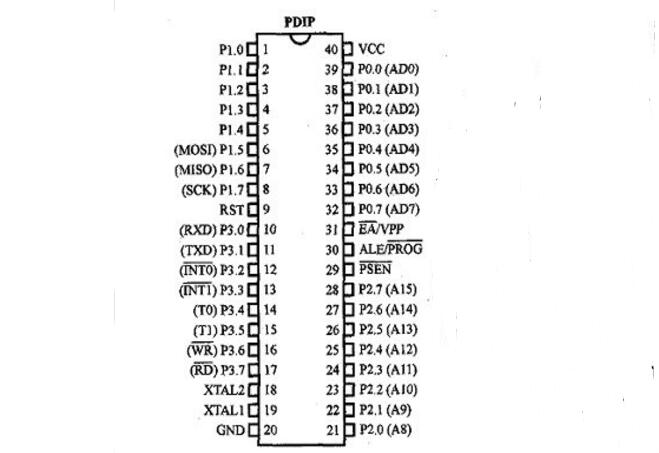
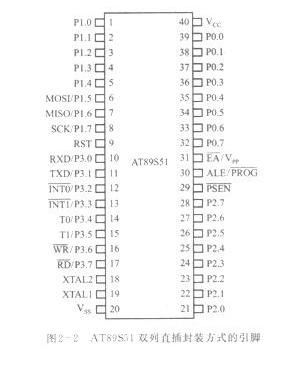
本系統(tǒng)的硬件部分以Atmel公司的AT89S51單片機(jī)為核心,其外圍電路主要包括:D/A轉(zhuǎn)換電路、電壓轉(zhuǎn)換電路、運(yùn)算放大電路、集電器模擬溫度電路、通信接口電路以及看門狗復(fù)位電路。其核心部分是D/A轉(zhuǎn)換電路和運(yùn)算放大電路,其他電路都是圍繞D/A轉(zhuǎn)換功能完善系統(tǒng)、保證程序正常運(yùn)行而設(shè)計(jì)的。通信接口電路實(shí)現(xiàn)上位機(jī)與下位機(jī)的數(shù)據(jù)通信;集電器模擬溫度電路實(shí)現(xiàn)四路溫度的模擬;看門狗復(fù)位電路監(jiān)控程序的運(yùn)行狀態(tài),在死機(jī)或“程序走飛”時(shí)可使系統(tǒng)自動(dòng)恢復(fù)到正常工作狀態(tài)。圖1所示為系統(tǒng)硬件原理結(jié)構(gòu)框圖。

系統(tǒng)工作過程:上位機(jī)發(fā)送控制字(包括信號(hào)通道選擇和信號(hào)幅值大小)至下位機(jī)(單片機(jī)),下位機(jī)采集控制字后,由單片機(jī)程序?qū)崿F(xiàn)所選信號(hào)通道以及信號(hào)幅值的大小。下位機(jī)產(chǎn)生信號(hào)后,通過串行總線將數(shù)據(jù)發(fā)送到上位機(jī)并顯示在上位機(jī)相應(yīng)的虛擬面板上。產(chǎn)生的信號(hào)通過板卡上的外接信號(hào)輸出端口傳輸?shù)綔y(cè)試設(shè)備相應(yīng)的通道上,模擬傳感器接收信號(hào)。如果測(cè)試設(shè)備接收后顯示的信號(hào)與板卡輸出的信號(hào)大小相一致,則認(rèn)為測(cè)試設(shè)備性能良好。
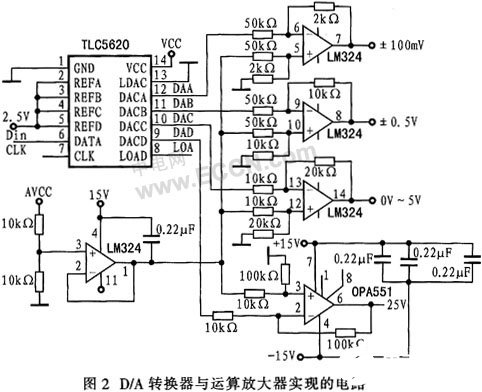
3.2 D/A轉(zhuǎn)換電路和運(yùn)算放大電路
D/A轉(zhuǎn)換電路采用美國德州儀器公司生產(chǎn)的TLC5620。它是一款帶有串行控制的4路8位電壓輸出數(shù)/模轉(zhuǎn)換器(DAC)。每一路均具有兩級(jí)緩沖器(輸入鎖存器(Latch)和DAC鎖存器)、一個(gè)輸出增益開關(guān),一個(gè)8位DAC電路以及一個(gè)電壓輸出電路。TLC5620的編程可通過對(duì)串行控制字中的RNG位置1或清零來實(shí)現(xiàn),其輸出電壓的最大值可以是外部參考電壓的1~2倍。其輸入/輸出電路均為射極跟隨器。
通過簡單的3線串行總線可對(duì)TLC5620進(jìn)行控制,其11位的命令字由8位數(shù)據(jù)位、2位DAC選擇位以及1位RNG位組成。DAC寄存器是雙緩沖的,將完整的新數(shù)值寫入器件,然后DAC輸出通過LDAC端的控制同時(shí)更新。數(shù)字輸出端帶有施密特觸發(fā)器,因此,該電路具有較高的噪聲抑制性能。
TLC5620采用4個(gè)電阻串(resistor-string)來實(shí)現(xiàn)D/A轉(zhuǎn)換。每一個(gè)DAC的核心是一個(gè)帶有256抽頭的單電阻,它們對(duì)應(yīng)于0~255的數(shù)字代碼。每個(gè)電阻串的一端連接到GND,另一端由基準(zhǔn)輸入緩沖器的輸出饋電。通過使用電阻串保持單調(diào)性,線性度取決于電阻元件的一致性和輸出緩沖器的性能。由于輸入端經(jīng)過緩沖,所以DAC對(duì)于基準(zhǔn)源總是呈現(xiàn)為高阻狀態(tài)。
每一個(gè)DAC的輸出由一個(gè)可控增益放大器緩沖,它可以被配置為×1或×2的增益。上電時(shí),DAC被復(fù)位為全“0”。每一路的輸出電壓可由下式給出:
V0(DACA~DACD)=REF×(CODE/255)×(1+RNG)
其中,CODE的范圍為0~255。RNG位是串行控制字內(nèi)的0或1。
四路+25 V模擬信號(hào)采用寬電壓輸出的運(yùn)算放大器OPA551。該運(yùn)算放大器可輸出±30 v電壓,電流最大值200 mA,可滿足本系統(tǒng)要求。其余采用LM324,以節(jié)約成本。方波信號(hào)采用定時(shí)器的溢出中斷來產(chǎn)生。四路溫度的模擬采用數(shù)字電位器和繼電器實(shí)現(xiàn)。調(diào)節(jié)電位器阻值大小實(shí)現(xiàn)溫度變化,由繼電器的動(dòng)作切換開閉溫度的模擬。D/A與運(yùn)算放大器電路如圖2所示。
3.3 系統(tǒng)通信模塊設(shè)計(jì)
通信模塊采用CAN總線和RS-232總線模塊實(shí)現(xiàn),其電路圖如圖3所示。
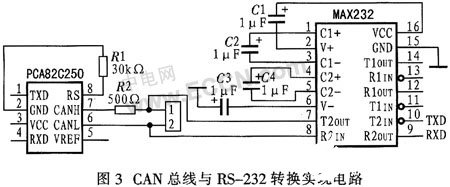
RS-232電平轉(zhuǎn)換器可以將輸入的±5 V電源電壓轉(zhuǎn)換為RS-232輸出電平所需的±10 V電壓。CAN收發(fā)器選用PCA82C250。PCA82C250是CAN控制器與物理總線之間的接口,可提供對(duì)CAN總線上數(shù)據(jù)的差動(dòng)發(fā)送和接收功能。
作為上位機(jī)的PC通過其串行接口發(fā)送數(shù)據(jù),產(chǎn)生RS-232電平信號(hào),由電平轉(zhuǎn)換電路將RS-232電平信號(hào)轉(zhuǎn)換成單片機(jī)所能接受的TTL/CMOS電平信號(hào),并傳到協(xié)議轉(zhuǎn)換單元的單片機(jī),單片機(jī)將接收到的數(shù)據(jù)打包、轉(zhuǎn)換后,通過CAN收發(fā)器發(fā)送至CAN總線。掛在CAN總線上的下位機(jī)節(jié)點(diǎn)收到數(shù)據(jù)后,根據(jù)控制命令做出相應(yīng)動(dòng)作。上位機(jī)與下位機(jī)通信示意圖如圖4所示。

4 系統(tǒng)軟件設(shè)計(jì)
本系統(tǒng)軟件設(shè)計(jì)分為兩部分:上位機(jī)采用Lab-Windows/CVI為開發(fā)平臺(tái),下位機(jī)以g6E為平臺(tái),采用匯編語言編寫。從功能上軟件設(shè)計(jì)可分為:系統(tǒng)初始化程序、主程序、串口中斷及定時(shí)器中斷程序。雙機(jī)通信協(xié)議約定如下:
aa+55+功能位+數(shù)據(jù)位+校驗(yàn)位
其中,前兩個(gè)字節(jié)為前導(dǎo)碼,第三個(gè)字節(jié)為控制命令,單片機(jī)根據(jù)此字節(jié)進(jìn)行相應(yīng)處理。第四個(gè)字節(jié)為具體控制數(shù)據(jù),最后為校驗(yàn)數(shù)據(jù)。根據(jù)此協(xié)議,上位機(jī)每次發(fā)5個(gè)字節(jié)。下位機(jī)接收到有效的前導(dǎo)碼后進(jìn)行相應(yīng)的動(dòng)作。
5 結(jié)束語
本測(cè)試信號(hào)源已投入使用,系統(tǒng)運(yùn)行可靠、性能穩(wěn)定,體現(xiàn)了良好的實(shí)用性與較高的性價(jià)比,完全能夠滿足各種測(cè)試環(huán)境的要求。
責(zé)任編輯:gt
-
傳感器
+關(guān)注
關(guān)注
2567文章
53080瀏覽量
768240 -
單片機(jī)
+關(guān)注
關(guān)注
6068文章
45011瀏覽量
651177 -
放大電路
+關(guān)注
關(guān)注
105文章
1815瀏覽量
108174
發(fā)布評(píng)論請(qǐng)先 登錄
AT89S51單片機(jī)功能及特點(diǎn)
AT89S51單片機(jī)
AT89S51單片機(jī)的I/O端口的特點(diǎn)及使用注意事項(xiàng)有哪些
AT89S51/52單片機(jī)與AT89C51單片機(jī)的主要區(qū)別在哪
智能多路信號(hào)源的設(shè)計(jì)與實(shí)現(xiàn)
AT89S51單片機(jī)是什么?
基于AT89S51單片機(jī)的教室燈光智能控制系統(tǒng)_畢業(yè)設(shè)計(jì)(論文)
AT89S51單片機(jī)硬件結(jié)構(gòu)介紹
基于AT89S51單片機(jī)控制的汽車倒車?yán)走_(dá)系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
AT89S51單片機(jī)試驗(yàn)及實(shí)踐教程
基于AT89S51單片機(jī)及無線收發(fā)模塊的新型報(bào)警器設(shè)計(jì)
AT89S51系列單片機(jī)的特點(diǎn)(AT89S51引腳功能及應(yīng)用電路)
AT89S51單片機(jī)各引腳的功能解析
AT89C51單片機(jī)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論