 為什么將GPS 天線與激光雷達布置在車輛頂部?
為什么將GPS 天線與激光雷達布置在車輛頂部?
1.無人駕駛汽車的政策法規尚未完善
目前,無人駕駛汽車普及應用的最大挑戰是大眾對其接受度較低,對其安全性、可靠性的信任度較低。但因國家對無人駕駛汽車的政策法規尚未完善,無人駕駛汽車還不能在公開道路上行駛。
鑒于以上兩點,國創中心主導,整合行業資源共同打造了一款 L4 的無人駕駛汽車,目前已經在首鋼園區內穩定運行。系統總體方案如圖 1 所示。
2.無人駕駛系統的設計與實現
無人駕駛系統是通過多種車載傳感器獲取車輛自身、周圍障礙物及道路等與駕駛任務相關的環境信息,并將這些信息提供給決策規劃,決策規劃再根據感知和定位獲取的環境信息、車輛狀態和用戶需求,規劃出合適的路徑,然后通過這些信息來控制自車的行駛狀態。
不同的自動駕駛級別和運營環境,自動駕駛的實現方案也不同。本項目針對首鋼園區建筑物高大、樹木繁茂較多、路況復雜的特點,提出了基于 3 個激光雷達、1 個毫米波雷達、2 個攝像頭、12 個超聲波雷達和 1 套組合導航單元的傳感器解決方案。傳感器安裝位置如圖 2 所示。
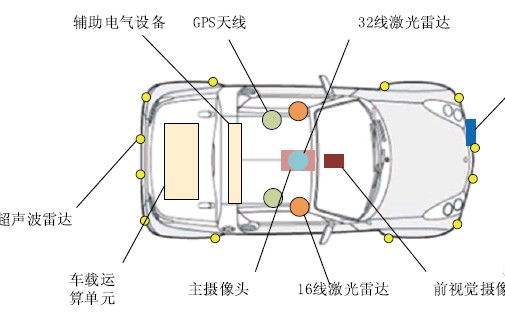
2.1傳感器
3 個激光雷達中的 32 線激光雷達布置于車輛頂部,2 枚 16 線激光雷達布置于車輛頂部兩側。用于檢測車輛周圍的環境信息和障礙物信息,獲取障礙物的尺寸和方位信息。具有測距精度高,方位準確,測量范圍廣、抗干擾能力強等優點。
毫米波雷達采用 77GHz 中長距雷達,布置在車輛前保險杠內側。用于檢測車輛前方的運動目標,獲取目標的速度和方位信息。具有較好的測速測距能力,且受外界影響較小,可以全天候工作。
主攝像頭布置于車輛頂部,前視覺攝像頭粘貼于擋風玻璃內側中部,用于檢測車輛前方障礙物信息、道路信息、標識牌信息和交通燈信息,獲取障礙物的類型和道路環境信息。具有對障礙物分類準確的優點。
12 枚超聲波雷達布置在車輛四周(前后 4+4,左右 2+2),用于檢測車輛周圍近距離障礙物信息,確保無人駕駛車輛可以自主出入庫。
2 個 GPS 天線布置在車輛頂部,1 個慣性導航單元布置于車輛后備箱內。用于獲取車輛的位姿和定位信息。
2.2無人駕駛系統軟件架構
本項目以純電動汽車為平臺,搭載上述 5 種傳感器,實現道路環境信息準確感知,并通過多傳感器信息融合技術將這些信息進行集成,降低誤判概率,提高信息輸出的穩定性和準確性。
設計開發了多傳感器融合算法、定位組合算法、決策規劃算法和車輛控制算法,實現了開放園區和封閉園區道路上的自主跟車、自主超車與并線、車道保持、交通路口自動通行、障礙物規避等功能,編寫了無人駕駛測試用例,制定了無人駕駛測試規范,完成了無人駕駛系統的測試。
為了達成該目的,將無人駕駛系統軟件架構分為傳感器接口層、感知層、定位層、決策層和車輛控制層。
傳感器接口層包括各種外圍傳感器的輸入。感知層收集各種傳感器的數據,進行多層次、多空間的信息互補和優化組合處理,最終實現對周圍環境的全方位感知。多傳感器融合方案如圖 3 所示。
定位層:根據激光雷達和組合導航單元的數據信息構建出全局地圖。激光雷達、攝像頭、毫米波雷達、超聲波雷達的感知結果融合處理后建立以行駛車輛為中心的感知局部地圖。并通過 GPS 信息、車輛位置和姿態信息的疊加。提供一種直觀了解行車環境各種信息處理結果的實時綜合地圖。
決策層:在全局環境中,依靠路網、任務和定位信息生成一條最優全局路徑;在局部環境中,依靠感知信息并在交通規則的約束下,實時推理出合理的駕駛行為,并生成安全可行駛的區域;
根據車速、道路復雜度生成平滑的可能行駛路線;分析靜態、動態障礙物和交通規程形成局部路徑規劃,并形成駕駛策略決策發送至車輛控制層。同時對系統故障進行處理和恢復并接受高層控制等。
車輛控制層:根據路徑規劃結果和車輛內部的各種傳感器信息,生成對車輛檔位、油門、方向的控制命令,保持車輛平穩高速行駛,實現自主駕駛。
3.人 - 車 - 云三位一體的人機交互系統的設計與實現
人機交互系統是無人駕駛汽車投入商用的一道門檻,它對于無人駕駛汽車產業和用戶來說都具有重要意義 [2]。目前用戶對無人駕駛汽車仍處于新奇和懷疑的態度,還遠遠無法達到信任和接受的程度。在這樣的背景下,無人駕駛汽車的人機界面就變得更為重要。
它需要成為用戶與汽車之間溝通的橋梁,讓用戶了解汽車的實時狀況,為用戶創造安全的駕駛體驗;也需要幫助用戶建立起與無人駕駛汽車之間的信任感,使用戶更加和諧的從傳統汽車過渡到無人駕駛時代 [3]。
本項目人機交互子系統的研究目標正是通過對無人駕駛汽車人機交互界面的合理設計,滿足用戶的駕乘需求,為用戶創造出安全便捷的駕乘體驗。
3.1功能概述
無人駕駛車輛運行在園區內固定的行駛路線上,沿線會設置一系列的站點,每個站點的站牌上貼有約車二維碼,位于任一站點附近的乘客可通過掃描站牌上的二維碼進入約車界面,選擇起始地和目的地,點擊確定后即下單成功。
訂單直接發送到云端,云端根據訂單情況對正在運營的無人駕駛車輛進行調度,同時發送訂單的運營路線到手機端和車載端,無人駕駛車按照接收到的運營路線去起始地接乘客,并送達指定的目的地,用戶可根據駕乘體驗對服務進行評價,至此訂單完成。
3.2系統設計
此系統采用 B/S,C/S 多層架構,支持多種網絡接入方式用戶端采用瀏覽器, H5 和 APP 的方式,減少系統安裝維護的工作量;用戶使用簡單,無需培訓;系統擴展容易;支持遠程業務處理。業務邏輯在服務器端運行,充分利用了服務器的處理能力;
通過結合 Web 負載均衡、組件負載均衡等,可以通過橫向擴充服務器,使得系統能夠處理更多的服務請求,滿足不斷增長的系統性能需求。人機交互子系統的邏輯架構圖如圖 5 所示,系統交互數據如圖 6 所示。
4.設計流程構建
立足于以用戶為中心的設計思想,將無人駕駛汽車的信息盡量透明化,幫助用戶輕松判斷汽車的可靠性,從而建立起對汽車的任感,促進大眾對無人駕駛汽車的接受度,促進無人駕駛汽車走入人們生活。設計流程如圖 7 所示。
結語
隨著互聯網技術和人工智能技術的迅速發展,完全無人駕駛已不是遙不可及。無人駕駛技術的落地除卻傳感器、計算平臺等技術本身的局限性外,也有賴于大眾對無人駕駛技術的認可和信任度。
本文從推動無人駕駛落地的角度出發,采用以用戶為中心的設計理念,借助科技冬奧的使用場景,設計與實現了無人駕駛及其運營系統。該系統已經在北京市首鋼園區內穩定運營了 5 個月之久,受到了大眾的廣泛好評。
未來隨著智能網聯時代的全面到來,無人駕駛汽車將覆蓋更多人群,其實現方式也從單車智能發展為車路協同,人機交互方式將不斷創新,落地場景將更加豐富。
責任編輯:pj
-
傳感器
+關注
關注
2552文章
51217瀏覽量
754609 -
激光雷達
+關注
關注
968文章
3988瀏覽量
190072 -
無人駕駛
+關注
關注
98文章
4074瀏覽量
120623
發布評論請先 登錄
相關推薦
一則消息引爆激光雷達行業!特斯拉竟然在自研激光雷達?
激光雷達會傷害眼睛嗎?

激光雷達的維護與故障排查技巧
激光雷達技術的基于深度學習的進步
激光雷達技術的發展趨勢
激光雷達在自動駕駛中的應用
光學雷達和激光雷達的區別是什么
一文看懂激光雷達

愛普生IMU產品在激光雷達測繪中的應用

激光雷達的應用場景
硅基片上激光雷達的測距原理

激光雷達的探測技術介紹 機載激光雷達發展歷程






 工商網監
工商網監
評論