 硅基毫米波雷達收發機芯片設計技術
硅基毫米波雷達收發機芯片設計技術
前言
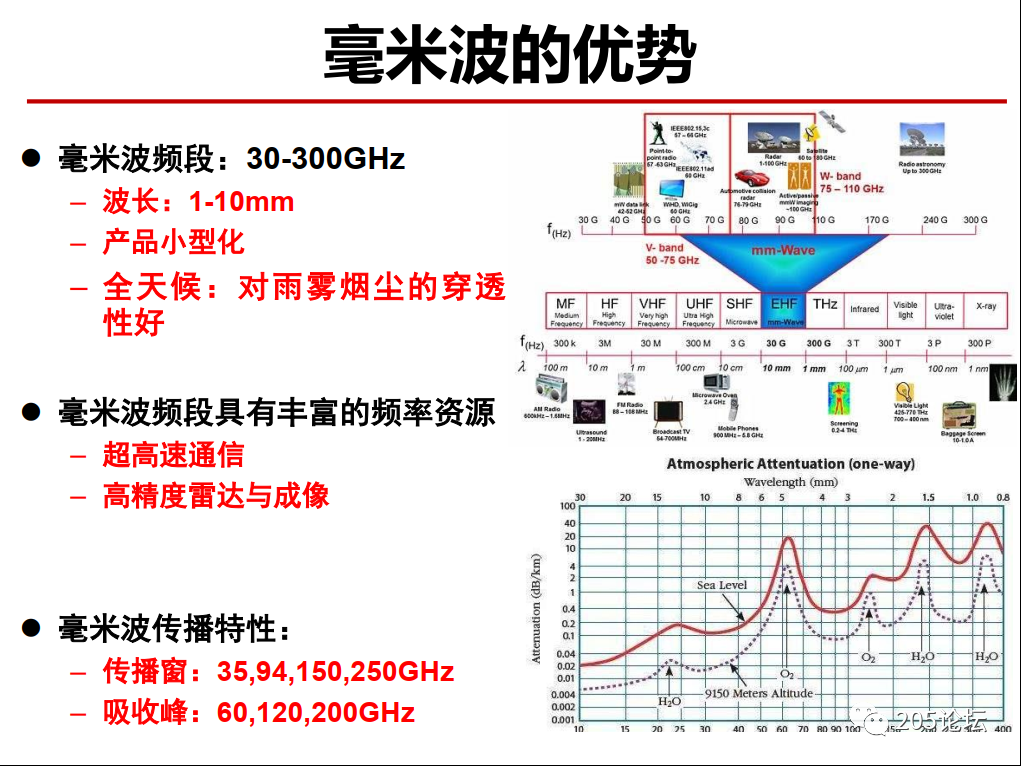
毫米波為真空波長從0.1~1.0 cm的電磁波,其對應的頻率范圍從30~300 GHz。
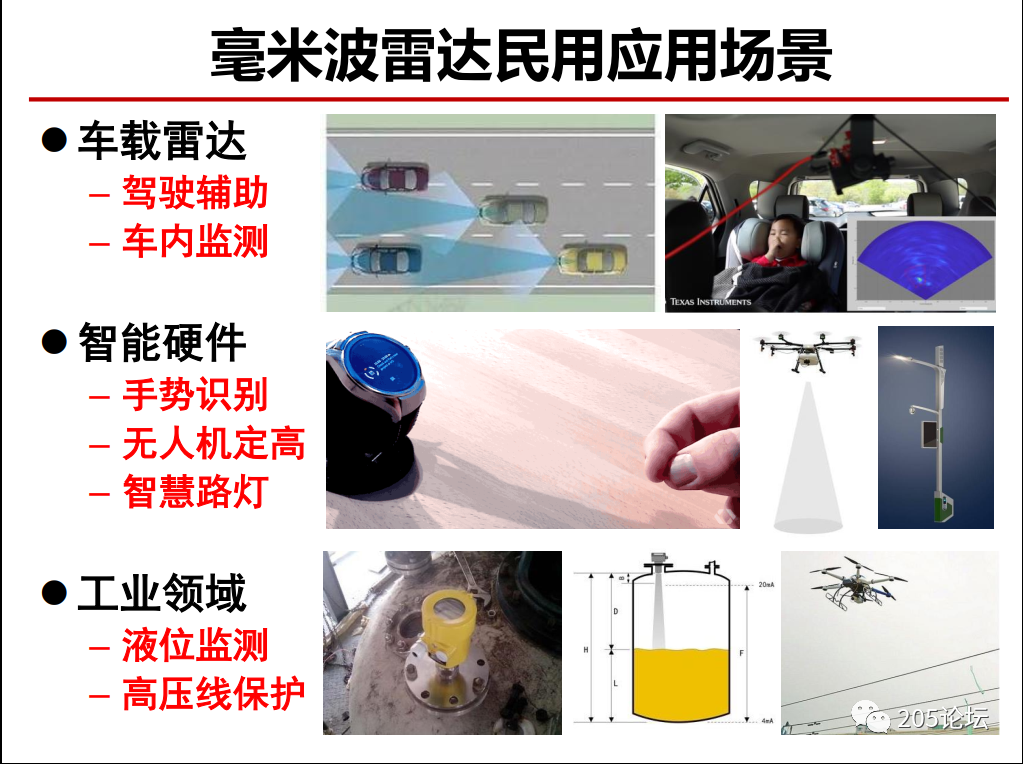
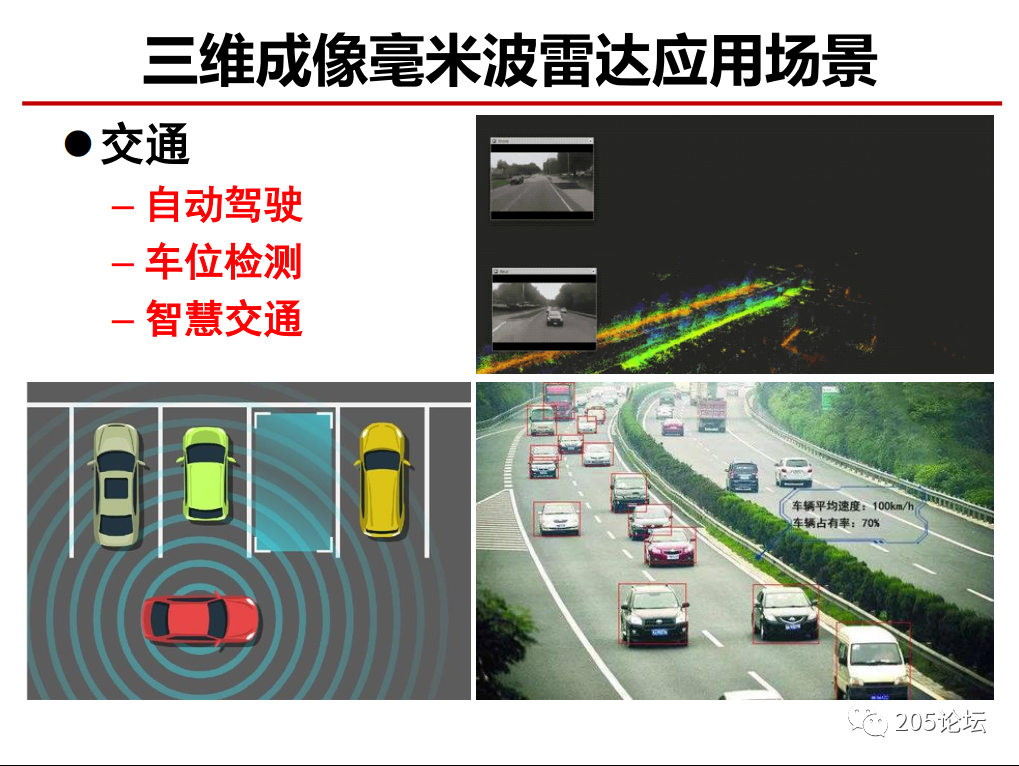
毫米波獨特的頻率范圍使其在雷達檢測中擁有獨特的優勢。與紅外、可見光等頻段相比,毫米波具備更好的穿透性,可輕易穿透雪、煙、塵等等,具備極端環境下的全天候工作能力。而相比于低頻射頻頻段,毫米波波長更短,可以獲得更好的分辨率,其所需的天線尺寸也更小,有利于小型化。毫米波雷達在車載雷達、智能機器人、生物體征識別、手勢識別等方面都有不可替代的優勢。
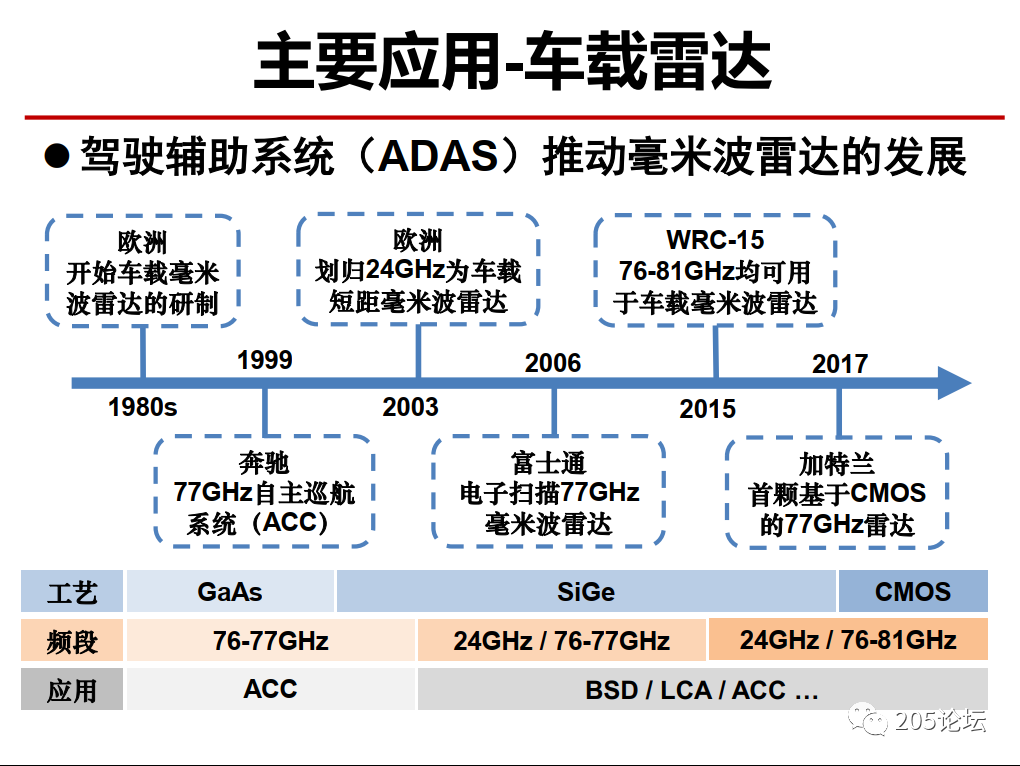
在車載雷達方面,現今的汽車對安全性和智能性要求越來越高,一輛高檔車里集成了各種電子輔助系統,如泊車輔助、自主巡航、盲點檢測、換道輔助、防撞預警、自主剎車等等。為了實現這些功能,車身需要安裝大量的傳感器,感知車身四周360o的環境。而且對傳感器的工作范圍、精度均有較高要求。現今的主流解決方案多采用24 GHz的雷達、圖像傳感器和若干個超聲波傳感器。這種方案成本高,精度和測距范圍有限,典型的最小檢測距離為20 cm,對于5 m外的目標距離分辨率為40 cm。一種更有潛力的方案是采用多個79 GHz的毫米波雷達替換掉超聲波傳感器和24 GHz雷達。79 GHz的毫米波雷達可以實現10 cm的最小檢測距離和小于5 cm的距離分辨率,相比于前一種方案有很大提高。
而且,毫米波雷達不需要對車身開孔,這對于汽車外觀設計也更為有利。學術界、工藝界對毫米波車載雷達開展了大量的研究。手勢識別是另一種毫米波雷達潛在的應用場景。如今主流的智能設備的人機交互方式是觸屏,包括點、劃、長按等等,在這種交互下,人手必須與設備直接接觸。毫米波雷達手勢識別通過無線信號檢測空中手勢,人手不需要與接觸屏幕,從而提供了新的交互維度。毫米波雷達手勢識別的代表之一是美國谷歌公司開發的Soli芯片。該芯片發射毫米波雷達信號,捕捉手勢的反射回波,將回波轉換為包含距離和速度的時序信息,之后通過機器學習算法進行特征提取,識別,定位和追蹤。得益于毫米波雷達的高距離分辨率,該芯片可以準確地識別按鈕、轉轉盤和滑動滑桿等手勢操作。相比于基于光學的手勢識別,毫米波雷達手勢識別功耗低,且不受環境影響,可靠性更高。
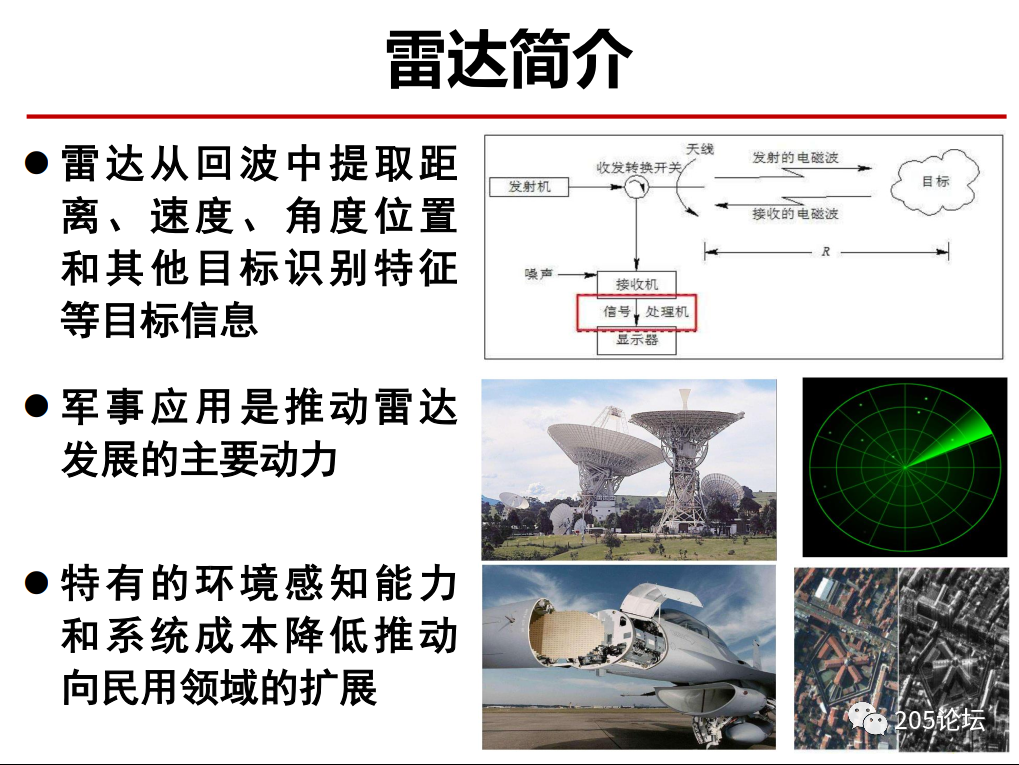
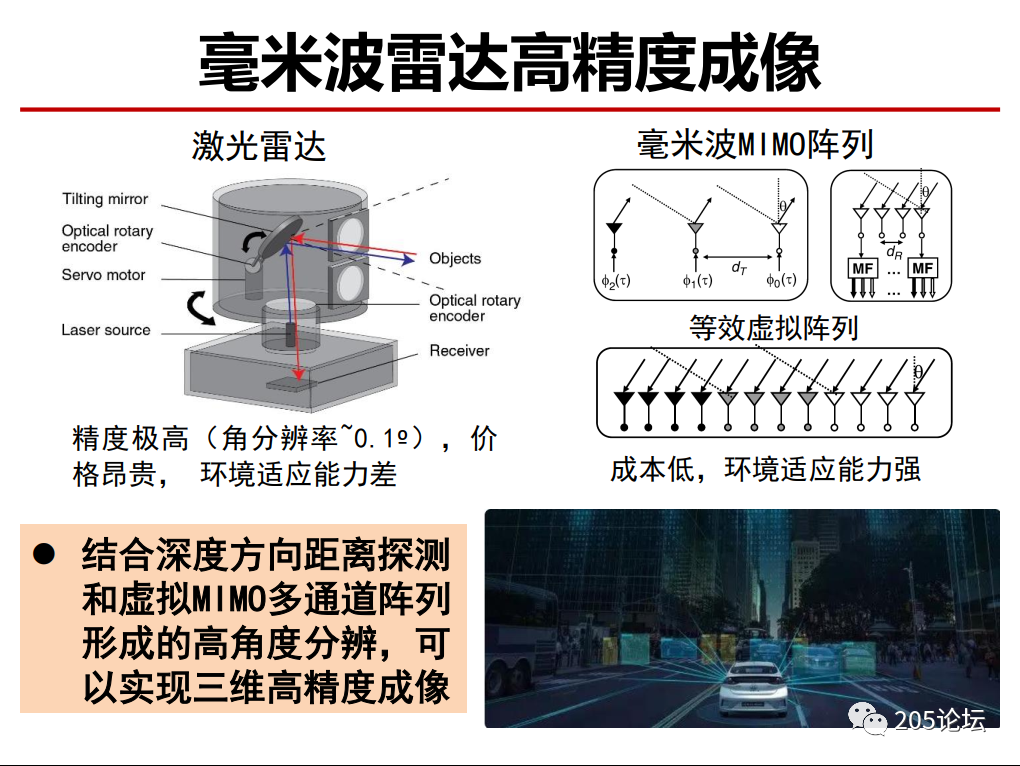
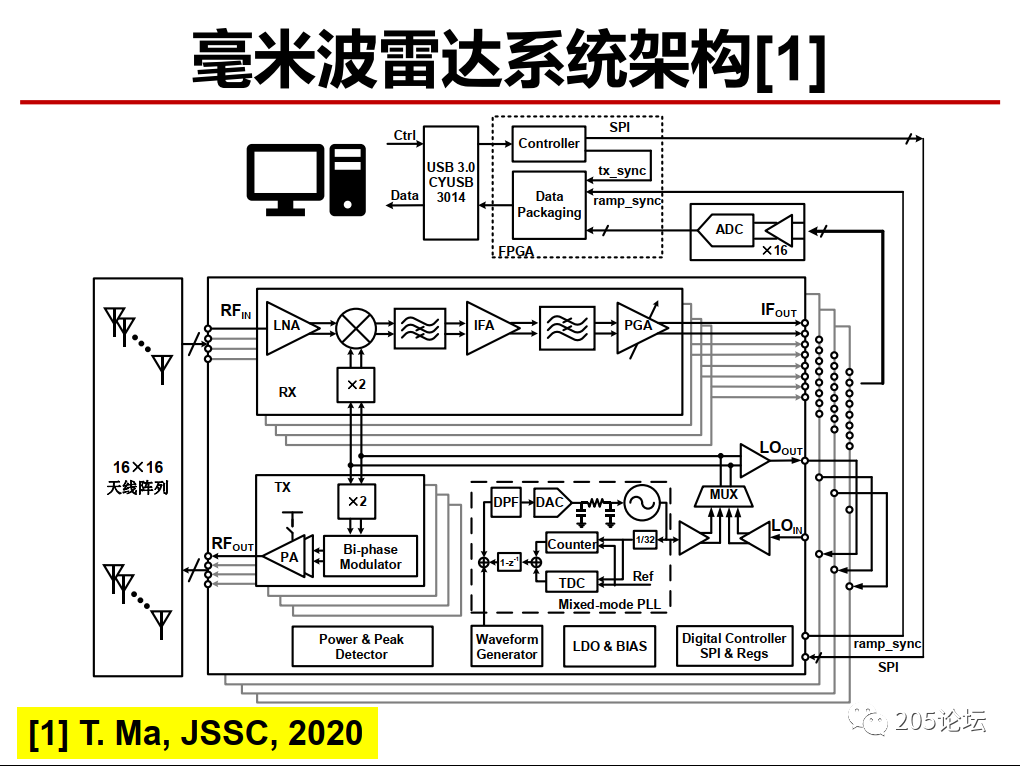
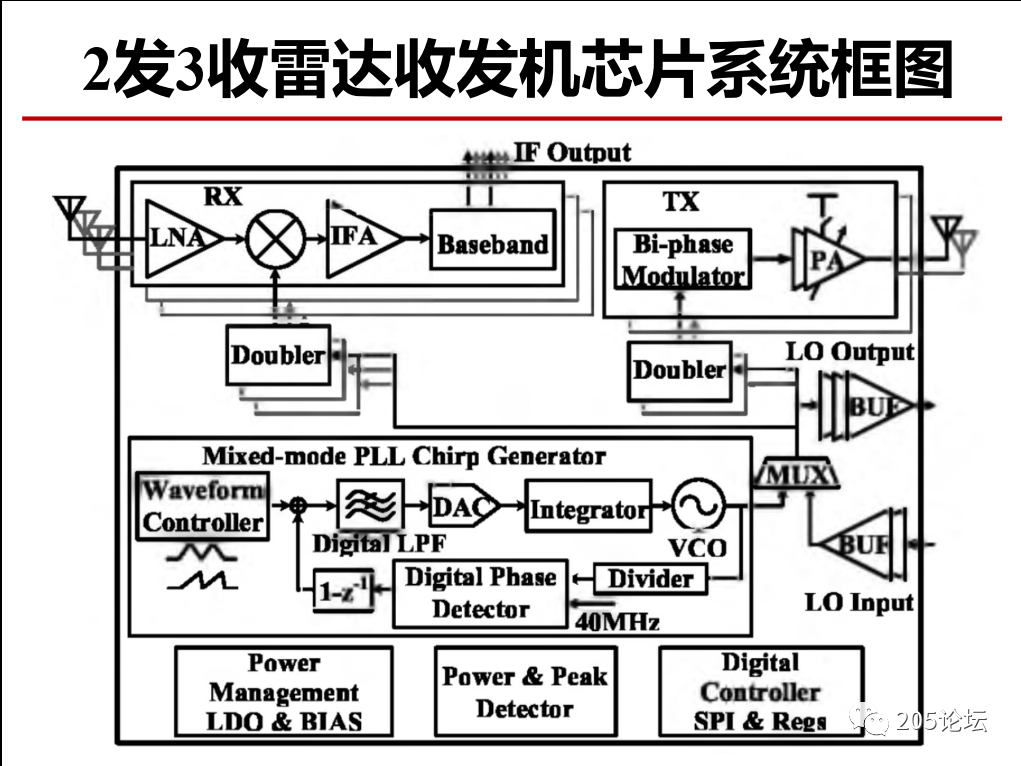
毫米波雷達系統主要包括天線、毫米波收發前端、數字信號處理和雷達控制電路。
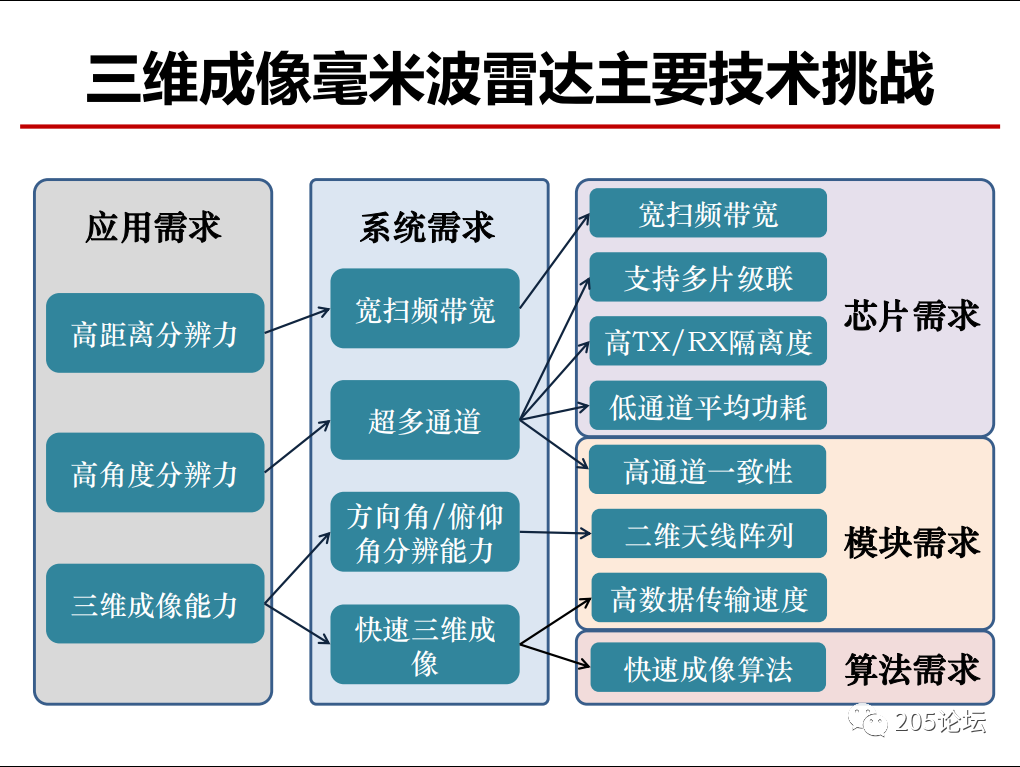
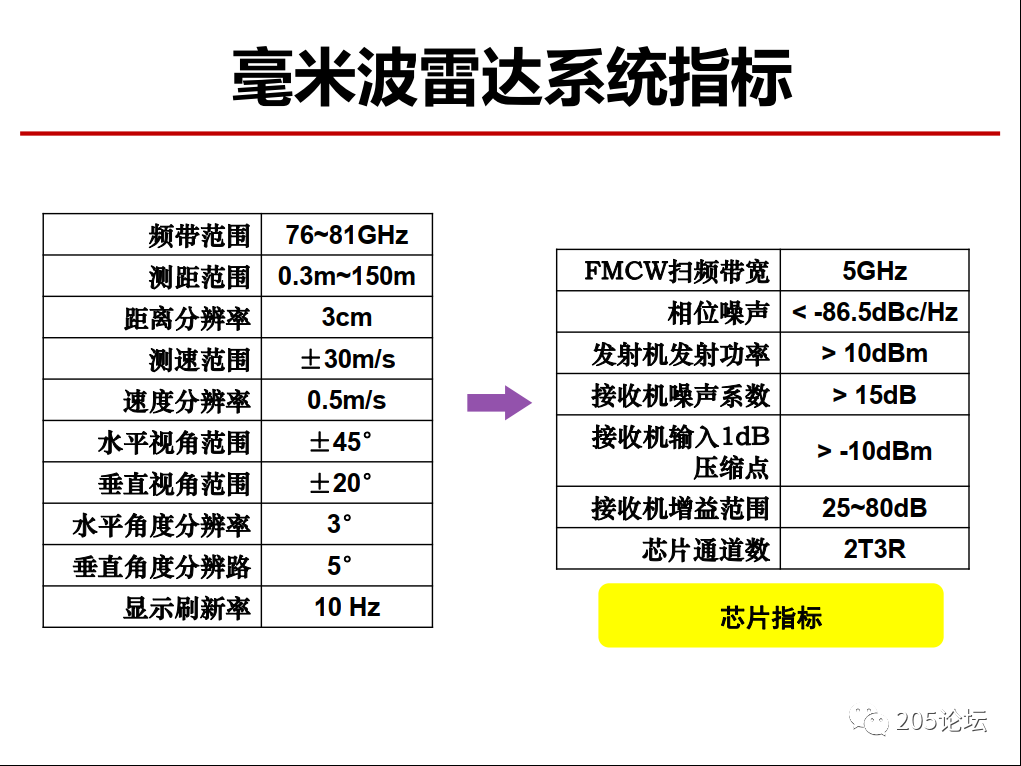
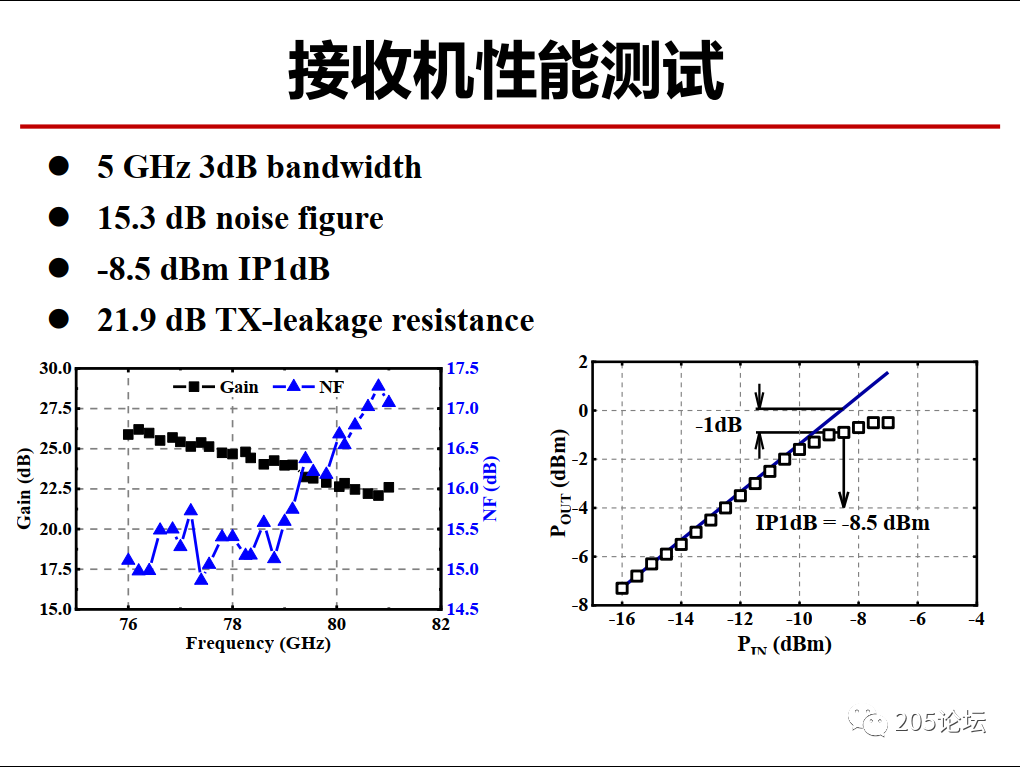
天線發射和接收電磁波信號,收發前端對信號進行放大、濾波、混頻等操作,同時完成數模模數轉換。對于毫米波雷達而言,天線和毫米波收發前端工作在毫米波頻段,是毫米波雷達系統的核心組件。其中,毫米波收發前端的發展趨勢為高性能(高輸出功率、高靈敏度、低功耗等)、大規模(相控陣、 MIMO陣列)和全集成。毫米波雷達系統的關鍵性能指標,如檢測范圍、距離分辨率等,主要由天線和毫米波收發前端的性能所決定,例如天線的增益,收發前端的發射功率、接收靈敏度等。根據應用的不同,毫米波雷達選擇的工作頻段往往也不相同。頻段的選擇主要的考慮因素有:頻譜規范、毫米波傳播特性、所需分辨率、成本(芯片制造、封裝等成本)等等。
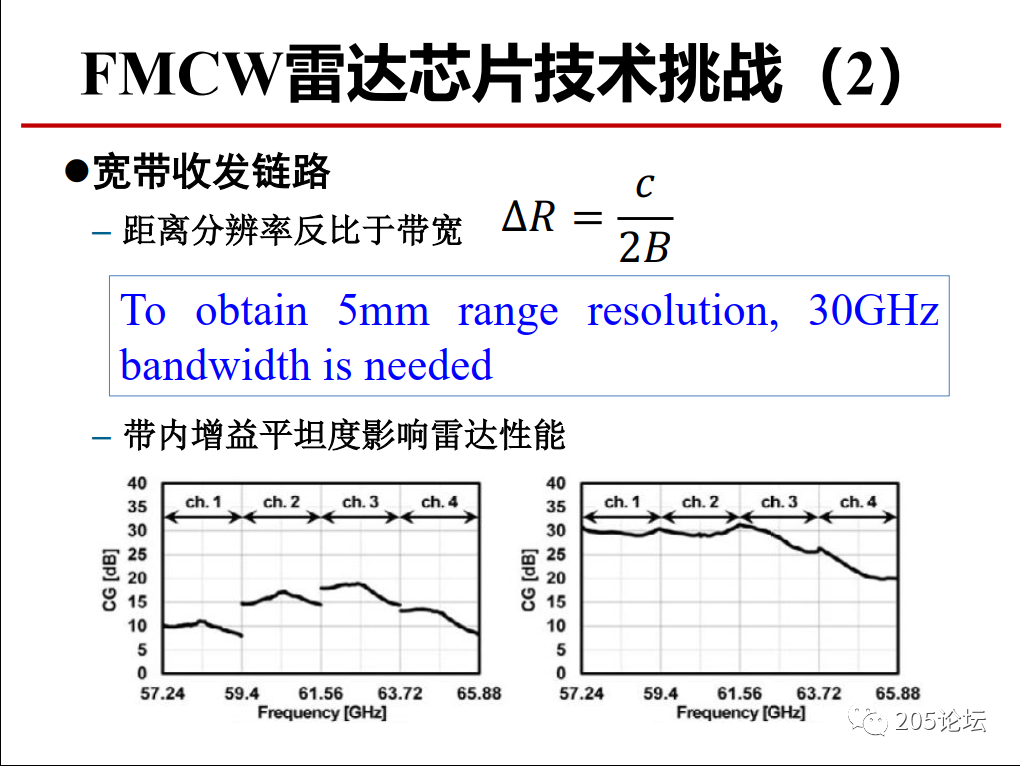
目前汽車毫米波雷達有較為明確的頻譜規范,世界主要國家和地區都將77 GHz的頻點分配給汽車雷達使用,其中包括歐盟、美國、加拿大、日本、中國等等,頻段或許略有不同。毫米波在空氣中的傳播特性隨著頻率有較大變化,是頻段選擇的另一個依據。例如,短距雷達可選擇衰減較大的頻點,以減少雷達之間的相互干擾。毫米波雷達手勢檢測Soli芯片的工作頻點選在處于衰減峰值的60 GHz。毫米波雷達的距離分辨率與帶寬成反比,當需要較高距離分辨率時可選擇更高的毫米波頻段,以獲得更高的可用帶寬。另外一個關鍵的頻段選擇依據為毫米波雷達的成本。頻段越高的毫米波雷達芯片,對晶體管的截止頻率要求也越高,從而需要更先進的工藝節點,成本也愈加昂貴。
例如, 65 nm的CMOS工藝截止頻率Fmax可到300 GHz,足夠用于設計工作在60 GHz或77 GHz的雷達前端電路。若將工作頻率提高到140 GHz,那么使用65 nm工藝的設計難度將急劇提高。頻率越高,封裝的信號完整性要求越高,封裝的成本也越高。毫米波雷達芯片最終的頻段選擇,需要在這些因素中折中考慮。





毫米波雷達芯片技術
常見的雷達測距原理有脈沖和調頻連續波(Frequency Modulated Continuous Wave, FMCW)兩種。
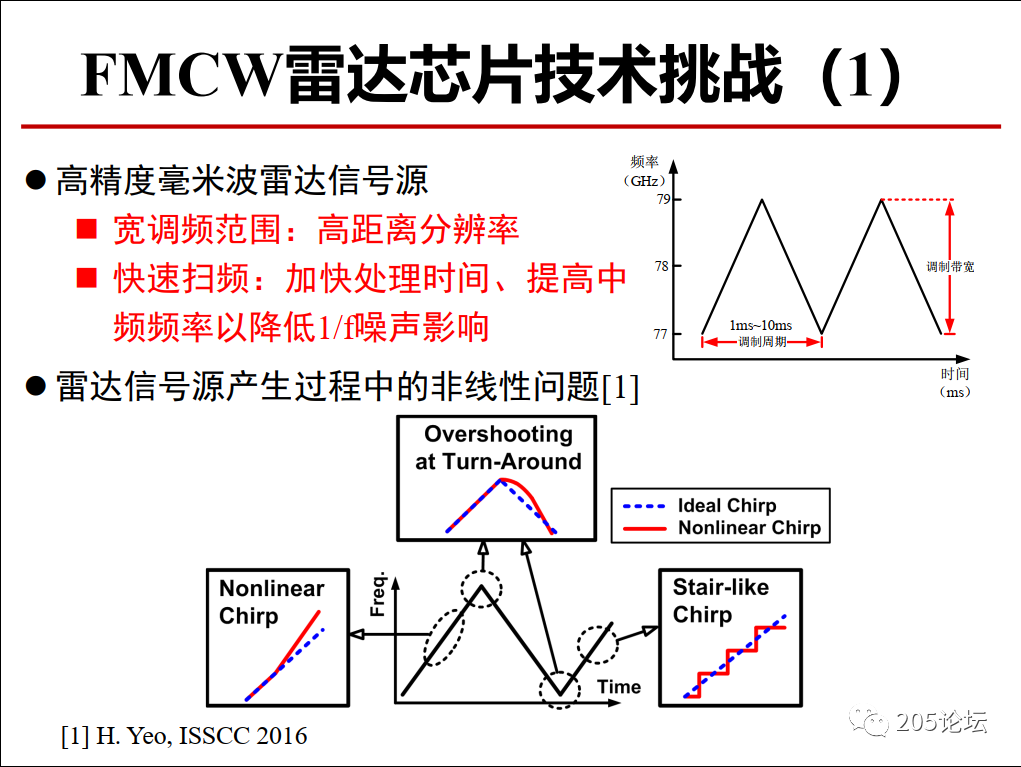
在脈沖雷達中,雷達發射間歇性的脈沖信號,通過測量從目標返回的脈沖信號與發射信號之間的時間差即可計算出目標的距離。而FMCW雷達發射頻率隨時間線性變化的連續波,通過發射波與反射波的頻率差來計算出目標距離。這兩種機制各有優缺點。脈沖雷達間歇性工作,因而噪聲小,可以檢測到更微弱的信號,適合長距離的探測。
由于發射信號的多普勒效應,脈沖雷達可以方便地計算出目標的瞬時速度。FMCW雷達使用頻率來計算目標距離,多普勒效應和目標距離造成的頻差混淆在一起,不易區分開。為了克服這個問題, FMCW雷達需要發射多個不同斜率的連續波并對結果進行處理,否則容易產生虛假目標。
但是,對集成電路而言,測量時間差比測量頻率差要困難很多,因此得到相同分辨率,脈沖雷達要比FMCW雷達昂貴。通常,由于瞬時發射功率過強而發射脈沖持續時間等因素,脈沖雷達存在近距離盲區(小于50~100 m),而FMCW雷達則無此問題。脈沖雷達的功率峰均比大,而硅基有源器件擊穿電壓過低,難以達到脈沖雷達的瞬時功率要求。最后, FMCW雷達的基帶信號處理更容易,接收到的回波與發射波混頻之后,中頻頻率在1 MHz的量級,對模數轉換器(ADC)和數字基帶的速度要求很低,可降低功耗和成本。上述這些特征使得硅基毫米波雷達更適合FMCW機制,文獻中的毫米波雷達大多采用FMCW機制,也有少量毫米波雷達采用脈沖機制。







集成毫米波雷達芯片與雷達系統




結束語
毫米波可輕易穿透雪、煙、塵等復雜環境,使得毫米波雷達具備不可替代的優勢,在汽車雷達、智能機器人等方面均有廣泛的應用。隨著半導體技術的快速發展,硅基工藝晶體管的截止頻率提升,足以支撐起硅基毫米波雷達芯片的研究。硅基工藝在成本和集成度方面的巨大優勢使硅基毫米波雷達吸引了來自學術界和工業界的大量研究。
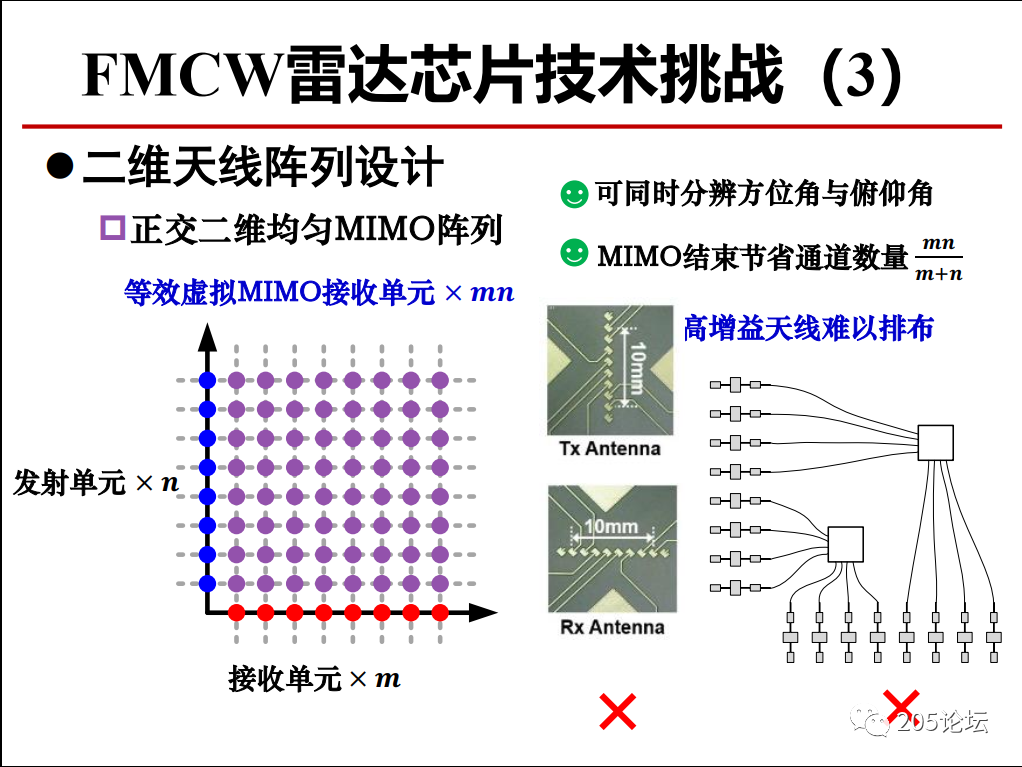
不同的應用會有不同的側重。在測距機制方面,FMCW體制的毫米波雷達結構簡單穩定,中頻頻率低,很大程度的放寬了對ADC以及數字基帶的速度要求,比脈沖體制更適合硅基芯片實現。PMCW體制可提供MIMO毫米波雷達所需的正交性,在MIMO雷達中得到應用。
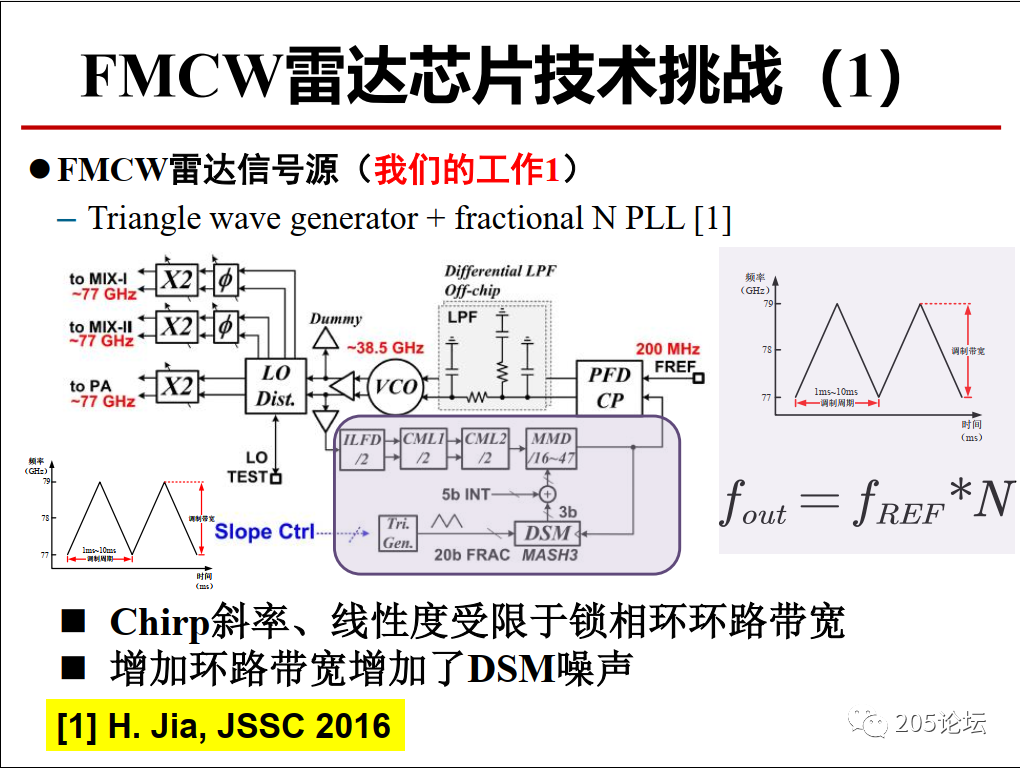
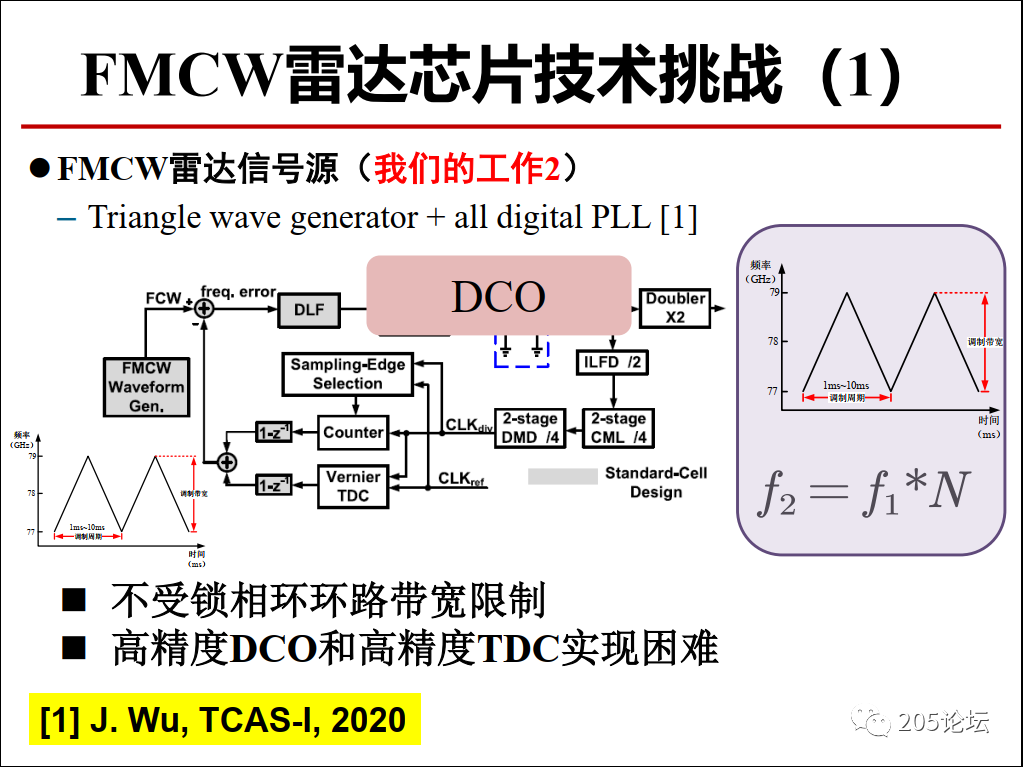
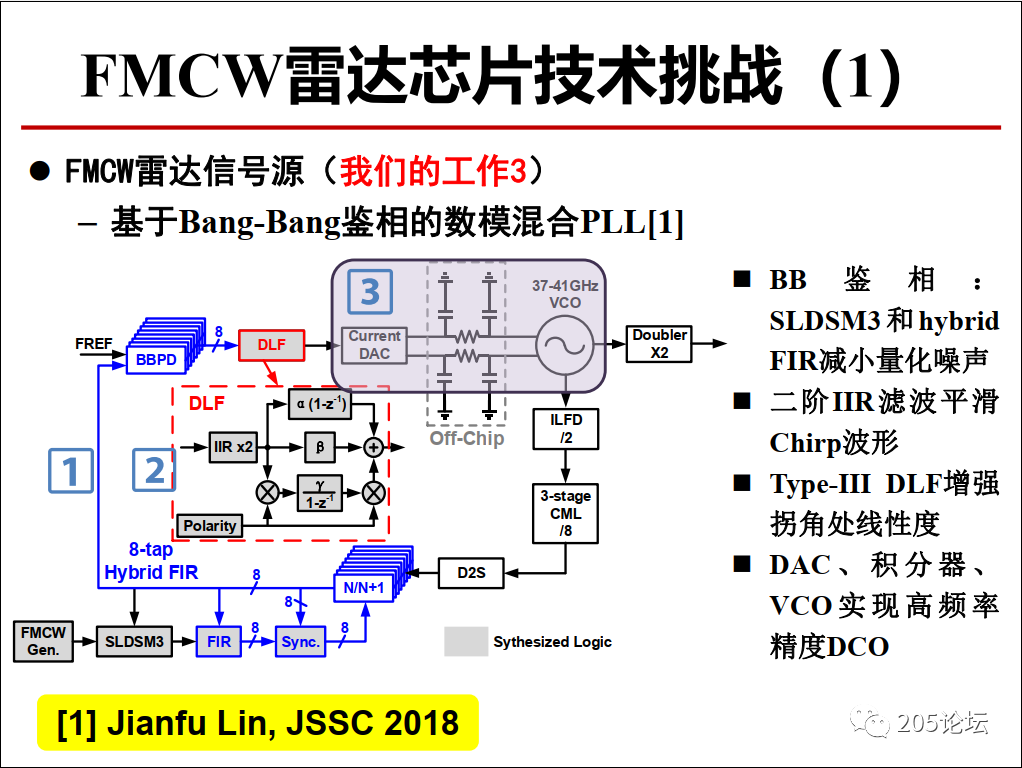
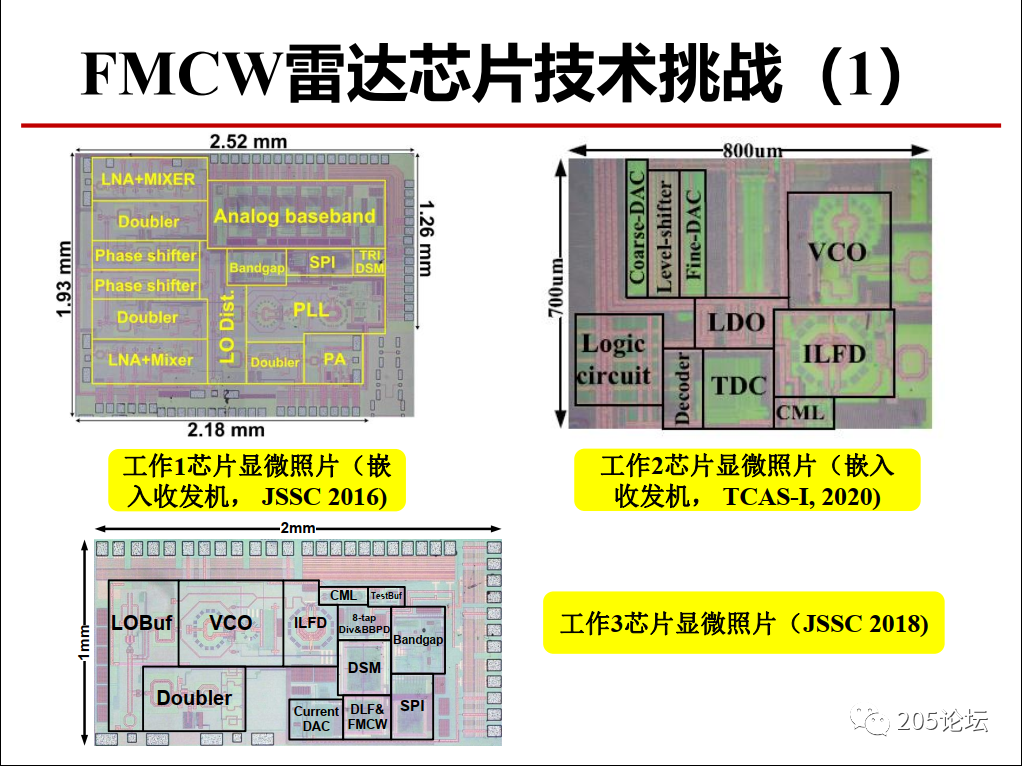
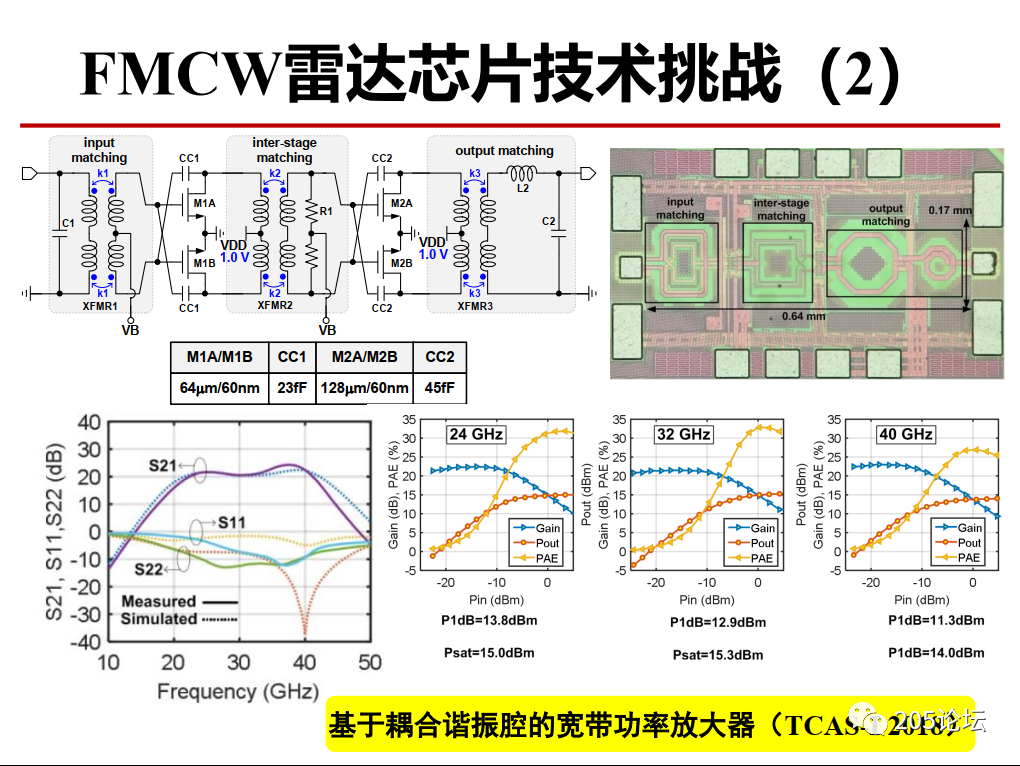
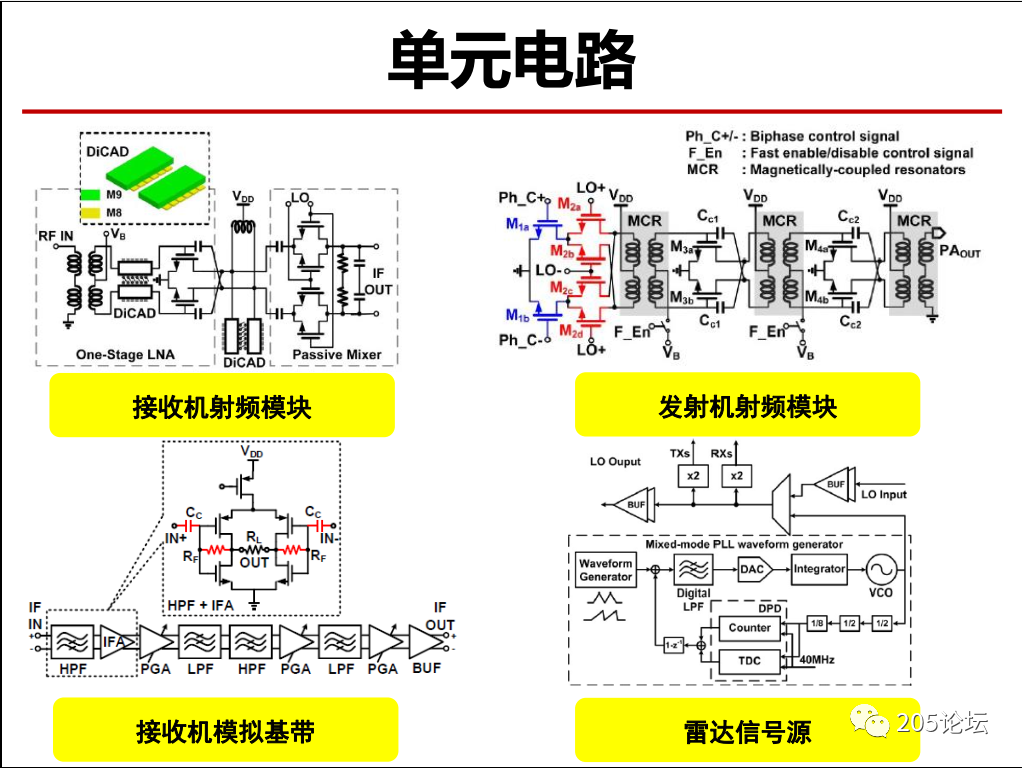
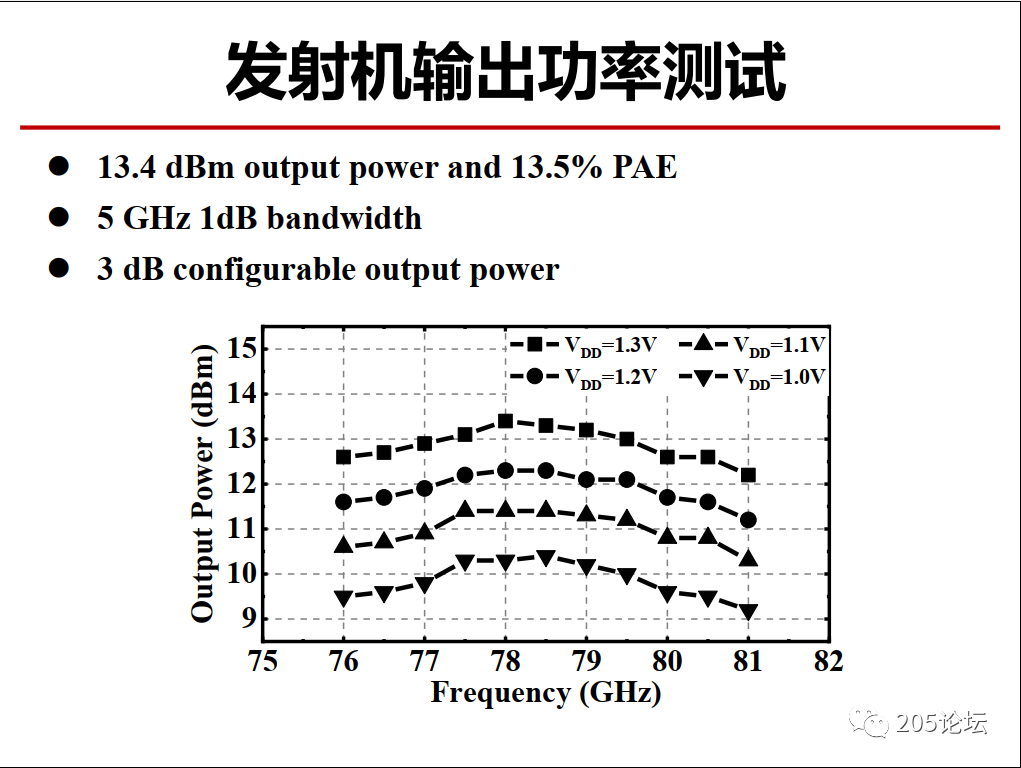
硅基毫米波雷達的關鍵電路模塊包括FMCW信號發生器和功率放大器。FMCW信號發生器主流采用鎖相環來實現,實現方式包括模擬鎖相環、數模混合鎖相環和全數字鎖相環。全數字鎖相環在可控性、芯片面積、校準功能等方面有優勢。功率放大器朝著更大的輸出功率和更高的效率兩方面進化。片上功率合成網絡是提高輸出功率的有效方式,有變壓器合成和傳輸線合成兩種主要的方式。
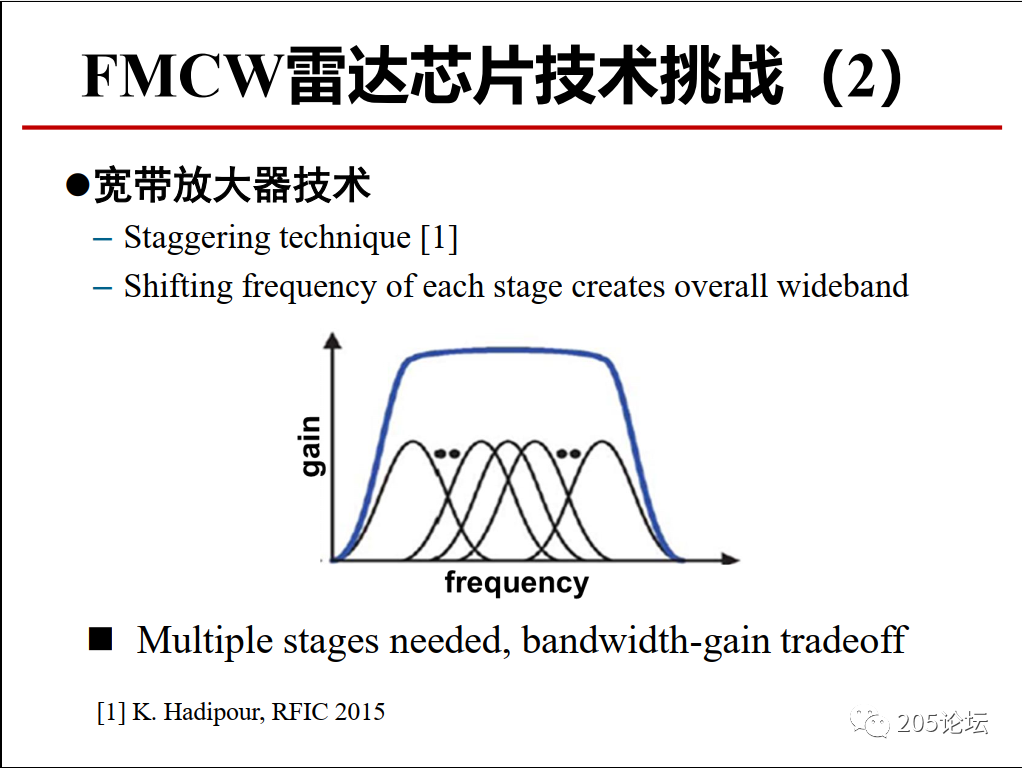
毫米波雷達的一個重要技術是寬帶技術。片上變壓器以與單電感相當的面積,實現了一個高階匹配網絡,在毫米波雷達芯片寬帶匹配中有很大潛力。毫米波雷達封裝和天線方面,封裝天線很好的平衡了天線性能與成本,在目前的毫米波雷達中得到廣泛應用。在今后的發展趨勢中,毫米波MIMO3維成像雷達和快速掃頻技術值得重點關注。
-
芯片
+關注
關注
456文章
50950瀏覽量
424740 -
收發機
+關注
關注
0文章
63瀏覽量
10194 -
毫米波
+關注
關注
21文章
1925瀏覽量
64882
原文標題:硅基毫米波雷達收發機芯片設計技術
文章出處:【微信號:mwrfnet,微信公眾號:微波射頻網】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論