 三大PID控制算法的C語言實現方案
三大PID控制算法的C語言實現方案
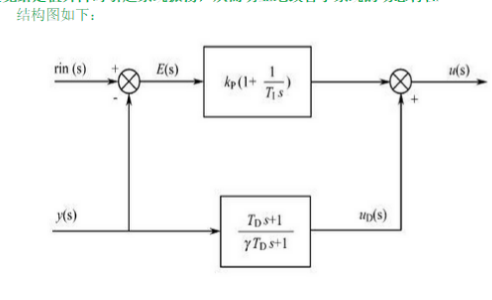
(1)微分先行PID控制算法
微分先行PID控制的特點是只對輸出量yout(k)進行微分,而對給定值rin(k)不進行微分。這樣,在改變給定值時,輸出不會改變,而被控量的變化通常是比較緩和的。這種輸出量先行微分控制適用于給定值rin(k)頻繁升降的場合,可以避免給定值升降時引起系統振蕩,從而明顯地改善了系統的動態特性
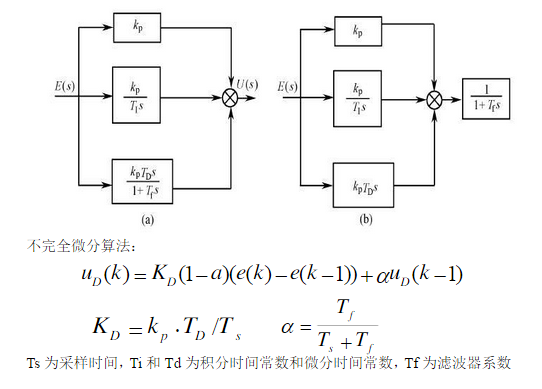
(2)不完全微分PID控制算法
在PID控制中,微分信號的引入可改善系統的動態特性,但也易引進高頻
干擾,在誤差擾動突變時尤其顯出微分項的不足。若在控制算法中加入低通濾波器,則可使系統性能得到改善
不完全微分PID的結構如下圖。左圖將低通濾波器直接加在微分環節上,右圖是將低通濾波器加在整個PID控制器之后
(3)帶死區的PID控制算法
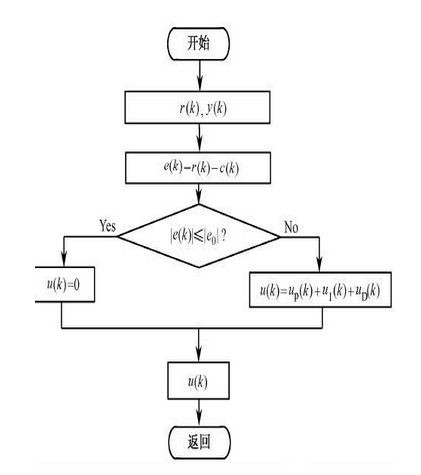
在計算機控制系統中,某些系統為了避免控制作用過于頻繁,消除由于頻繁動作所引起的振蕩,可采用帶死區的PID控制算法,控制算式為:
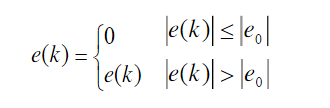
式中,e(k)為位置跟蹤偏差,e0是一個可調參數,其具體數值可根據實際控制對象由實驗確定。若e0值太小,會使控制動作過于頻繁,達不到穩定被控對象的目的;若e0太大,則系統將產生較大的滯后 控制算法流程:
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
單片機
+關注
關注
6037文章
44569瀏覽量
636206 -
PID
+關注
關注
35文章
1472瀏覽量
85598 -
PID控制
+關注
關注
10文章
460瀏覽量
40128 -
控制算法
+關注
關注
4文章
166瀏覽量
21743
發布評論請先 登錄
相關推薦
什么是PID控制器及其應用
單元(I)和微分單元(D)三個基本部分組成,通過調整這三個部分的參數(Kp、Ki、Kd)來實現對被控對象的精確控制。 PID

PID在工業控制領域的實現原理
PID控制器非常實用且有效。它們基于簡單的數學原理,通過調整三個參數(比例系數P、積分系數I和微分系數D)來對系統的偏差進行控制。這種簡單性使得PI
發表于 04-12 11:06
?823次閱讀

什么是pid控制原理 pid各個參數對系統的影響
PID(Proportional-Integral-Derivative)控制是一種常見的控制算法,廣泛應用于工業過程控制、機器人
ADUC7061如何使用C語言實現EEPROM功能?
我使用ADUC7061做的信號采集,現在客戶需要實現EEPROM功能來保存3-5個數據,請問如何使用C語言實現?不使用外部EEPROM 專用IC。
發表于 01-12 06:56





 工商網監
工商網監
評論