 研究人員開發新算法,可改善自動駕駛系統性能
研究人員開發新算法,可改善自動駕駛系統性能
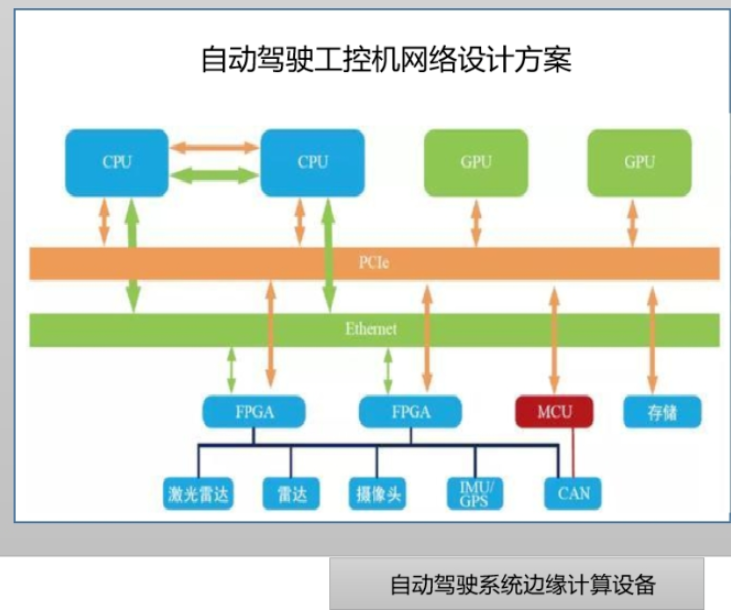
據外媒報道,來自北卡羅來納州立大學(North Carolina State University)的研究人員開發了一套算法,通過平衡各個組件對數據的需求,以及數據的發送和接收速度,從而提高自動駕駛汽車等信息物理系統的性能。
新算法論文作者之一、該大學電子與計算機工程教授Aranya Chakrabortty表示,“信息物理系統集成傳感器、設備和通信工具,允許所有系統元件共享信息,協調活動,以完成目標。”這些系統具有巨大的潛力,但也帶來了挑戰。
Chakrabortty解釋道,“具體而言,系統中的物理代理,即設備,需要大量的通信鏈路才能有效運行。這會導致大量數據流經通信網絡,從而導致路徑選擇延遲和排隊延遲。而延遲會導致代理需要等待很長時間才能采取行動,從而降低系統的質量。換言之,由于延遲時間太長,系統可能無法完成其既定目標。”這造成了一種困境,減少通信意味著系統每個元素將能夠更快地獲取信息,但會損害系統性能的質量,因為系統每個元件將使用更少的信息來運行。
Chakrabortty表示,“因此,我們需要在三個變量之間取得平衡,即適當的通信稀疏度、最佳延遲時間和代理的最佳可實現性能。要取得這種微妙的平衡,以盡可能好地方式執行任務,同時確保每個代理安全和穩定運行是不容易的,而這正是我們的算法發揮作用的地方。”
Chakrabortty和研究生Nandini Negi開發了三種算法,可減少系統中每個節點的數據請求總數,但確保每個節點都能快速接收充足的信息,以實現系統目標。Negi稱,“沒有一種萬能的解決方案可以適用于所有信息物理系統,但我們的算法允許用戶找到適用于所有系統的最佳通信解決方案。”
近年來,在設計信息物理系統(cyber–physical systems,簡稱CPS)稀疏度控制方面,出現了一些新的以降低通信成本為目標的研究方向。在這些設計中,常見的假設是通信發生在專用網絡上。然而,在許多實際應用中,通信必須發生在共享網絡上,這導致了兩個關鍵的設計挑戰,即反饋延遲和用戶之間無法公平共享帶寬。在此種設計約束條件下,研究人員開發了稀疏H2控制設計,該設計的一個基本方面是延遲本身可以是一個稀疏性函數,得以在H2中實現反饋延遲和用戶公平共享帶寬之間的平衡。
研究人員提出了三種不同的算法,第一種算法預設了可分配給網絡的帶寬,并產生穩定控制器的初始猜測。第二種算法采用乘子交替方向法(ADMM),對控制器進行稀疏化,同時令其適應反饋延遲,并優化H2性能。第三種算法將此種方法擴展到多用戶場景中,通過最小化用戶H2性能的差異,將總數固定、數量最優的通信鏈路公平地分配給用戶。這些算法將該問題轉換為具有混合整數線性規劃(MILP)約束的凸差(difference-of-convex,簡稱DC)規劃問題。研究人員提供了一些定理,證明這些算法的收斂性,并通過數值模擬進行了驗證。
責任編輯:tzh
-
控制器
+關注
關注
112文章
16404瀏覽量
178637 -
通信
+關注
關注
18文章
6043瀏覽量
136171 -
網絡
+關注
關注
14文章
7583瀏覽量
88969 -
自動駕駛
+關注
關注
784文章
13877瀏覽量
166629
發布評論請先 登錄
相關推薦
一文聊聊自動駕駛測試技術的挑戰與創新


FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
自動駕駛識別技術有哪些
中級自動駕駛架構師應該學習哪些知識
初級自動駕駛架構師應該學習哪些知識
三星停止自動駕駛研究,開發人員轉到機器人領域
智能駕駛大模型:有望顯著提升自動駕駛系統的性能和魯棒性

未來已來,多傳感器融合感知是自動駕駛破局的關鍵
邊緣計算與自動駕駛系統如何結合
自動駕駛發展問題及解決方案淺析

康謀方案 | 加速自動駕駛系統開發的技術解決方案
兩種端到端的自動駕駛系統算法架構





 工商網監
工商網監
評論