 AUTOSAR的核心概念
AUTOSAR的核心概念
從工程師的角度看AUTOSAR
“軟件定義汽車”的火熱帶動了工程師們對于汽車電子軟件熱烈地討論。不曾想到,隱藏在控制器內部,默默地發揮著作用的汽車電子軟件,如今備受矚目。本人畢業到現在,一直在汽車行業做軟件,切身感受到一系列的變化。寫軟件的方法在變,行業技術標準在變,和OEM合作模式在變,還有敏捷轉型等等。10多年前,有人認為汽車行業是夕陽產業,IT是朝陽產業。現在看來,無論是汽車還是IT,依然朝氣蓬勃,更令人欣喜的是,這兩個產業的融合為未來的發展帶來了新的契機。
1
開端-OSEK/VDX
OSEK/VDX標準的出現代表著汽車電子軟件標準化的開端,該標準的構成:實時的操作系統(OSEK OS),通訊子系統(OSEK-COM)和網絡管理系統(OSEK-NM)。
在OSEK出現之前,軟件生產商們僅依靠自身積累,寫出的軟件五花八門,水平參差不齊,有些甚至沒有清晰的軟件層次結構,這樣寫出的軟件質量堪憂,并且可維護性是很差的。有了OSEK標準的借鑒和指導,很多軟件生產商依照OSEK標準開發出了自己的軟件產品。像汽車行業的Tier1,提供軟件與硬件整套完整方案是常態,Tier1自研的完善可靠的軟件產品也是其核心競爭力之一。
OSEK OS是實時操作系統,可以滿足大多數汽車控制器的任務調度要求。另外其可移植性和可擴展性很高,可以輕松移植到新MCU平臺。對于實時性要求,除了要有好的操作系統,也需要程序設計者合理地規劃常規任務和中斷處理程序,如果任務阻塞或執行時間過長,會極大的影響正常任務的調度。近年來,軟件系統的實時性和確定性執行也不斷地在演進。確定性操作系統,再配合邏輯執行時間(LET)模型,可提供更高級別的功能安全機制。
下圖摘取自OSEK標準文檔,圖中展示了OSEK/VDX的基本結構和各組件間的關系。這也算是典型的帶網絡通信的汽車ECU軟件的最小系統了。

在2000年左右,Tier1的ECU軟件自研比例非常高,對軟件產品的掌控力也相當強,底層軟件和應用層軟件都由Tier1完成開發。OEM和Tier1之間軟件開發的合作方式,主要是由OEM向Tier1分發書寫格式和內容非常規范化的需求文檔,有些做到好的,則采用格式化的語言來描述需求,甚至是偽代碼的書寫形式。
V模型開發流程(瀑布模型的進階)是當時的主流。按自上而下的過程遞交交付物,并在相對應層級依次驗證,是V模型開發的特點。V模型開發迭代周期長,一般與功能交樣時間相匹配。迭代次數少,一般5到6次迭代后,基本就到SOP量產了。當時汽車ECU功能定義固化早,每個ECU功能數量較少,需求開發相對穩定,在當時看來,V模型的開發流程是非常合適的。
2
進階-AUTOSAR
上文提到了OSEK,因為它與AUTOSAR頗具淵源,AUTOSAR的部分設計也參考了OSEK標準。OSEK是汽車軟件標準化的第一步,它影響的范圍是ECU層面。OEM和Tier1之間穩定的合作方式也已經形成。但汽車軟件標準化的進程并沒有停下來。
這里插句題外話。OEM和Tier1的這種合作模式下,Tier1的系統與軟件能力變得格外的強,另外OSEK的標準化,總線設計的標準化,也讓各個廠家設計的ECU之間的連通變得簡單。在這個背景下,Tier1對整車電子電器架構的影響很大,依靠Tier1的能力,攢起一套主流的電子電器架構也成為可能。行業頭部的整車廠,Tier1,芯片等其他環節的供應商,對電子電器架構的構想也一定程度上推動著行業的發展。
上文有提到過,OEM需要花費相當大的精力來書寫需求說明書,以描述ECU的應用層功能,完成后交予Tier1來開發軟件。而隨著車上的ECU數量不斷增加,信號復雜程度增加,傳統的開發方式顯露出了開發復雜,維護困難等弊端。讓汽車電子系統開發更靈活,更有效率,成為汽車工程師的目標。AUTOSAR的誕生旨在達成這個目標。AUTOSAR從一開始就志在整體汽車電子開發的標準化。所以AUTOSAR所涵蓋的方法論,虛擬功能總線,元模型與模板工具,軟件架構及模塊,所有這些工作都導向這一目標。可以毫不夸張的說,AUTOSAR是汽車工程師的智慧結晶。
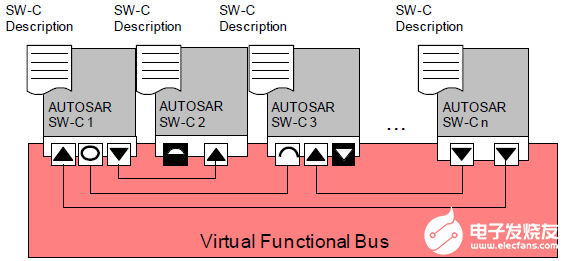
AUTOSAR的推出,OEM與Tier1之間的合作方式有了微妙的變化。在介紹新的合作方式之前,這里 先介紹下AUTOSAR的核心概念:虛擬功能總線(VFB)。
下圖引用自AUTOSAR標準。如圖,VFB之上描述的是軟件組件(SWC),以實現軟硬分離。OEM著重于系統層面的設計,包含SWC的設計及它們之間的通信方式。VFB是虛擬總線,真實的情況是它們以Flexray,CAN總線方式通信,或者是ECU的內部通信。而這些都會在整車開發流程中的SWC部署,網絡設計中體現。
在了解以上的基本概念后,再來講講OEM和Tier1的合作方式有哪些。
方式一:
OEM:以AUTOSAR的標準方法設計系統及軟件架構,并以ARXML的形式導出,同時負責應用層軟件SWC的開發。
Tier1:以AUTOSAR的標準方法完成基礎軟件的配置與生成,復雜驅動軟件的開發,最終軟件的集成與版本釋放,并提供硬件平臺。
特點:雙方關注自己負責的軟件部分,耦合部分不多,溝通成本最低。
方式二:
OEM:基本與方式一相同,但OEM自己不開發應用層軟件。
Tier1:除了方式一提到的內容,還包括應用層軟件的開發。
特點:軟件開發的工作都落到了Tier1身上,但應用層軟件需求溝通的成本較高。
方式三:
OEM:除了系統及軟件架構設計以外,OEM還負責應用層及底層軟件開發,包括最終軟件的集成與釋放。
Tier1:僅配置MCAL部分的軟件。
特點:OEM包攬了大部分的軟件工作,Tier1的價值僅在于提供硬件平臺(包括MCAL軟件)。
方式四:
OEM:按自身的方式設計系統架構及發布需求,但并不是AUTOSAR的標準方法,應用層軟件開發為備選。
Tier1:以AUTOSAR的標準方法完成底層軟件,應用層軟件為備選,取決于OEM是否提供基于標準接口的應用層軟件。
特點:此方式用到了AUTOSAR軟件標準架構和模塊,但缺少了精髓的系統設計部分。
另外,AUTOSAR也改變了軟件工程師需要的技能和工作方式。手工代碼漸漸轉向基于模型的開發,底層功能模塊依靠工具配置及代碼生成。驗證軟件的方式也更多樣,模型仿真,SIL,HIL等等。
3
突破-AP AUTOSAR
從本節開始,AUTOSAR會標注CP (Classic Platform) 和AP (Adaptive Platform),以示區分。
CP AUTOSAR標準其實也在不停的演進中,Ethenet, Crypto, E2E, SOME/IP等等也是在4.X的版本中才出現。基本上,有新的技術需要運用,AUTOSAR就有推出相應的標準。
但CP平臺畢竟有它的局限性,對于高算力的應用場景無能為力。AP AUTOSAR的出現正是應對高性能計算平臺的需要,AP AUTOSAR的定位是運行于POSIX操作系統之上的中間件。設計者也不乏考慮,AP平臺和CP平臺在一個架構下共存的問題。所以它與生俱來,具備和CP AUTOSAR有良好的交互能力。
高性能計算平臺必然是未來電子電器架構的主角,已經有不少架構師們設想把它運用到多域控制器,以及中央計算平臺當中。AP AUTOSAR在高性能計算平臺的作用不可小覷。這可以從AP AUTOSAR的設計細節得出。
ARA:COM提供應用層之間標準且可靠的通信方式,統一化的通信方式有助于避免由于通信機制的不同造成的設計缺陷。同時支持事件驅動和輪詢模式也是它的主要特點,因實時應用程序通常基于輪詢模式,而支持此模式可以保證前后級數據傳遞式樣的一致,避免不必要的上下文切換。
ARA:EXEC主控應用程序的生命周期,設計者同時也考慮了功能安全方面的設計,例如狀態恢復,資源管理,確定性執行等機制。
ARA:SM 收集應用程序的各種異常狀態并適時地調整相應的應用程序功能,為功能安全提供有效的機制。
ARA:PHM提供監控應用程序的能力,并在檢測到異常后執行恢復動作。它支持幾種典型的任務監測機制:alive, deadline, logical supervision。
其他AP AUTOSAR包含的API及Service組件不在這里 一一介紹。可以看出,APAUTOSAR除了提供基本的應用層開發平臺中間件,同時也有不少功能安全上的考慮,其中一些機制可以有效的應對ISO26262軟件部分“Freedom from interference”中提出的相關需求。
AP AUTOSAR在這樣一個復雜的環境下誕生,工程師們必定對其賦予厚望,從它的設計思路來看,AP AUTOSAR不但吸取了現有成熟的技術,同時也有所創新,引入互聯網技術的同時也不乏考慮其適用性和可靠性。如今AP AUTOSAR剛經歷了幾個版本,對比CP AUTOSAR從萌芽到茁壯成長的過程,AUTOSAR的未來必定可期。
— END—
《淺談汽車電子軟件》專輯
進入汽車行業是偶然,但選擇做軟件是必然。聽一位前輩說過,“你永遠別指望一個人能把一件不喜歡的事做好”,軟件技術一直是我的愛好,汽車也是我熱愛的,慶幸當初的自己能選擇這個行業。現在閑暇時寫一些分享性的文章,希望和行業中的友人們一起成長。
作者:Paulfrank
-
OEM
+關注
關注
4文章
403瀏覽量
50419 -
AUTOSAR
+關注
關注
10文章
363瀏覽量
21677
發布評論請先 登錄
相關推薦
光庭信息榮獲AUTOSAR中國中心2024年度特別貢獻獎
AUTOSAR通信對自動駕駛的影響 AUTOSAR通信與嵌入式系統設計
AUTOSAR通信與網絡安全 AUTOSAR通信在車輛中的應用
AUTOSAR通信實現中的常見問題
AUTOSAR中通信堆棧的配置 AUTOSAR通信模塊測試方法
AUTOSAR通信框架的優勢 AUTOSAR通信實例與應用場景
AUTOSAR通信與CAN協議的關系
AUTOSAR通信組件介紹 AUTOSAR通信層功能分析
AUTOSAR通信協議解析 如何實現AUTOSAR通信
極海半導體推出AUTOSAR MCAL軟件包和配置工具

AUTOSAR解決方案 — INTEWORK-EAS-AP

首款支持AUTOSAR車規MCU亮相AUTOSAR中國日






 工商網監
工商網監
評論