


摘要:為了實現遠距離紅外目標的運動和靜止狀態的識別,設計了基于熱電堆紅外傳感器的紅外探測系統,系統包括梯析(GRIN)透鏡、微系統(MEMS)熱電堆傳感器、信號調理電路、數據采集電路和識別算法。探測結果表明:在相同光路系統的情況下,探測系統實現了比熱釋電系統更遠的探測距離,實現了動態目標和靜態目標的識別,并基于探測目標溫度、輻射面積的區別,實現了人、車輛和其他紅外目標的分類識別,可為紅外目標的探測識別提供一種新的解決方案。
0引言
紅外探測技術憑借其環境適應性好、隱蔽性好、體積小等優點,廣泛應用于紅外偵查、防盜報警等領域。目前常用的紅外探測技術主要有基于運動特征的方法、基于形狀信息的方法、基于人體模型的方法等,采用紅外成像設備系統是非常昂貴且計算復雜度高; 然而紅外目標的入侵識別應用往往不需要由圖像設備提供高分辨率,利用紅外傳感器對目標輻射特征識別來代替視頻追蹤,作為價格昂貴的熱成像紅外設備的替代品是可行的。
現有的紅外探測系統大多是基于熱釋電紅外傳感器的運動特征識別,其探測系統只能實現紅外目標的運動入侵識別,應用領域受到很大局限。
為了實現紅外目標入侵探測和靜態識別,本文設計了一種基于微系統(MEMS)熱電堆紅外傳感器的紅外探測系統,采用梯析(GRIN)透鏡會聚目標輻射以提高有效探測距離,利用熱電堆傳感器探測目標紅外輻射,對探測器信號進行小波分解和重構,濾除背景輻射帶來的基線漂移,通過多閾值設定實現目標的分類識別。
1熱電堆紅外探測器工作原理
熱電堆探測器是一種可以對外界紅外輻射產生響應的傳感器,近10年來,由于微細加工技術的發展進步,MEMS熱電堆紅外傳感器也取得了飛速發展。
熱電堆探測器采用賽貝克效應(Seebeck effect)設計制作,如果兩種不同的材料或者材料相同而逸出功不同的物體A和B,在熱結相連,而在冷端區開路,熱結和冷結存在一定的溫差ΔTHC,則在冷端的兩端就會產生一開路溫差電動勢Vout,賽貝克效應的數學公式可表述為

式中SAB為物體A和物體B之間賽貝克系數差,VK -1。對于半導體材料,產生賽貝克效應的主要原因是熱端的載流子往冷端擴散的結果。
一般而言,微機械熱電堆紅外探測器主要由紅外吸收體,絕緣結構和熱電堆組成(圖1),熱結區與紅外吸收體相鄰,其溫度隨紅外吸收體變化而變化,冷結區與熱結區通過絕緣結構隔離,其溫度與環境溫度保持一致。當紅外吸收體吸收外界輻射時,熱結區溫度升高,而冷結區溫度不變,導致熱結與冷結溫差增大,通過賽貝克效應,熱電偶材料將溫差轉換為電壓,故可以通過熱電堆兩端的輸出電壓測量外界紅外輻射的大小。
圖1 MEMS熱電堆紅外探測器組成結構
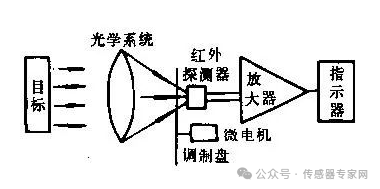
2光學系統
紅外輻射能量在大氣中傳輸會存在衰減,GRIN透鏡是一種非均勻介質透鏡,用來配合熱電堆傳感器以提高接收靈敏度及擴大探測距離和范圍。
GRIN透鏡的參數如下:型號為GERMANIUM;焦距為41.2 mm;入瞳直徑為21.035 mm;探測角度為4°;厚度為2.55 mm。
透鏡將紅外熱量投射到熱電堆敏感單元,熱電堆敏感單元的面積只有0.1mm2,經過透鏡能夠投射到元件圓形范圍內的現場景物也就局限在一個錐形空間里,即熱電堆探測器只能“看”到這個錐形空間內的熱能景物,將這個錐形敏感空間稱為熱電堆探測器的視場,Zemax仿真結果如圖2所示。
圖2 GRIN透鏡的視場仿真
3信號調理電路
設計信號調理電路是為了在充分抑制噪聲的前提下,實現紅外信號的有效放大,同時保證最小的失真,電路設計的好壞對探測器性能的發揮起著關鍵性作用。設計一個放大調理電路,首先需要對輸出信號進行分析,常用比探測率D* 描述探測器的綜合性能,定義為

式中NEP為噪聲功率密度,S和N為探測器的信號電壓和噪聲電壓,PD為探測器靶面接收的輻射功率密度,A為探測器靶面面積,Δf為放大器帶寬(它影響著系統中的噪聲)。D*為一個綜合反映探測信號、噪聲及帶寬的指標,D*越大,探測器性能越好。傳感器的關鍵參數:噪聲等效功率NEP為 ;比探測率(D*)為1.5 × 108cm
;比探測率(D*)為1.5 × 108cm ;響應度R為182 V/W;時間常數Τ為15 ms;輸出電阻RS為100 kΩ。
;響應度R為182 V/W;時間常數Τ為15 ms;輸出電阻RS為100 kΩ。
首先確定輸出信號的帶寬,熱電堆探測器輸出信號的數學形式為

式中Vt為一定輻照度下探測器的瞬時輸出電壓,Vmax為一定輻照度下的探測器穩態響應電壓,τ為時間常數。對式(3)進行傅里葉變換并取值衰減至10%處為信號帶寬,得到探測器輸出信號帶寬為11 Hz。
其次需要確定探測器本地的噪聲,即噪聲等效電壓。根據探測器的噪聲等效功率為和響應度182 V/W,得到噪聲等效電壓為 。
。
當明確了放大信號的基本特征后,方可進行電路設計,為了滿足上述信號放大,選用運放AD8629作為前置放大器,電路實現框圖如圖3所示,前置放大電路用以對信號低噪聲放大,低通濾波器用以限制噪聲帶寬并進行模/數轉換之前的抗混疊濾波,后級放大用以對信號進行二級放大,從而有效利用模/數轉換的滿量程。

圖3 信號調理電路框圖
由于熱電堆傳感器信號微弱且內阻很大,同相比例運算電路具有較高的輸入阻抗和很低的輸出阻抗,增益不受信號源內阻的影響,不僅能夠實現傳感器的阻抗匹配,且可以實現傳感器微弱信號的拾取。熱電堆傳感器輸出信號受環境溫度影響,導致偏置電壓,影響目標的識別,采用熱電阻作為補償單元,消除環境溫度帶來的影響。
模擬低通濾波器的主要作用在于對高斯分布的廣譜噪聲進行限帶濾波,為后級的模/數轉換提供抗混疊濾波,為了盡可能減小信號失真,需要濾波器衰減陡度較大,所以采用二階低通濾波器,截止頻率設置為15.9 Hz。在濾波后,為了充分利用后級模/數轉換器的滿量程,需要進行二級放大,電路總的放大倍數為41 × 201 = 8241倍,熱電堆信號由幾個微伏量級信號被放大到幾十毫伏量級。
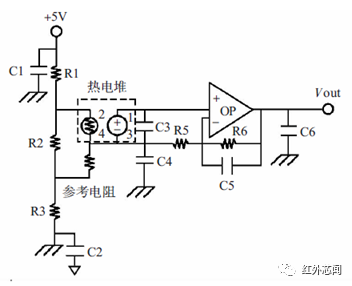
圖4 前置放大電路
4信號采集和識別算法
信號采集電路實現框圖如圖5所示。

圖5 信號采集實現框圖
通過熱電堆探測系統可以實現紅外目標的波形采集,如圖6所示。
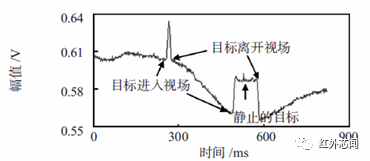
圖6 運動和靜止信號
觀察發現,目標進入探測區域,會產生一定頻率的上升沿,目標如果一直存在于視場中,輸出會一直保持在高電平,當目標離開探測區域時,會有一個一定頻率的下降沿。理想情況下,傳感器探測目標的輸出應該是一個矩形信號,但是由于背景干擾的影響,傳感器的輸出存在基線漂移的干擾,如果直接采用閾值識別方法,將會產生很多由于基線漂移帶來的誤報,影響探測系統的有效識別距離。
針對基線漂移的特性,提出了小波分解與重構的處理方法,將探測器信號x(t)分解成若干本征模函數(intrinsicmode function,IMF)分量,信號x(t)可以表示成

若IMF分量不包含基線漂移的信息,則其均值應該為0,對含有基線成分的IMF 進行小波分解,將頻率范圍只覆蓋基線頻率的小波細節置零,然后小波重構獲得新的IMF分量,最后進行信號重構就得到消除基線漂移的探測器信號。根據IMF分量的性質,若IMFi不包含基線信息,則其均值應該為0,即應該滿足下式

結果如圖7所示,線漂移基本上被濾除,通過識別算法可以實現目標運動和靜止識別,識別算法如圖8所示,識別結果如圖7矩形波所示。
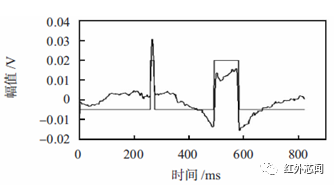
圖7 小波處理結果與識別結果
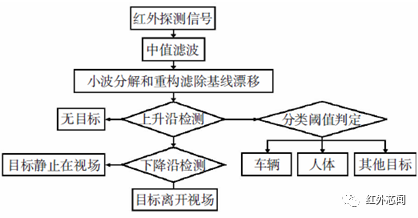
圖8 識別算法框圖
5系統測試結果分析
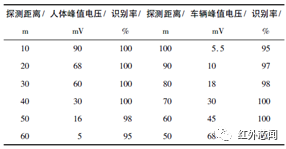
對探測系統進行室外測試實驗,探測器與目標距離設置為10、20、30、40、50、60 m等,探測方向與目標運動方向垂直,人體目標速度保持在1 m/s,車輛速度保持在10 m/s,為了驗證系統的普適性,本文選擇了不同的車輛和人員來采集信息,在每一個距離點上各取100組實驗數據,取其平均值為信號峰值電壓。
從表1中可以看出:同一距離,人員和車輛的峰值電壓區別很大,探測系統可以實現人體目標40 m距離的無誤報探測,車輛目標的70 m無誤報探測,且基于車輛和人體峰值電壓的區別來進行分類識別是可行的。
表1探測器系統測試結果
6結論
基于MEMS熱電堆紅外傳感器的紅外探測系統,采用GRIN透鏡會聚目標輻射以提高有效探測距離,利用熱電堆紅外傳感器探測目標紅外輻射,不僅實現獲取探測區域目標的運動入侵探測,且能夠實現探測區域內目標的靜態識別。實驗結果表明: 該探測系統在野外測試條件下,人體目標可以實現40 m遠距離探測,車輛可以實現70 m探測,為軍事預警防御、智能小區監測等場所的人體以及車輛識別提供了一種低成本、遠距離探測的方案。
-
紅外傳感器
+關注
關注
9文章
544瀏覽量
48378 -
探測系統
+關注
關注
0文章
60瀏覽量
11515 -
熱電堆
+關注
關注
2文章
35瀏覽量
15407
原文標題:MEMS熱電堆傳感器的紅外探測系統
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
紅外傳感器技術分類:熱釋電、熱電堆與微測輻射熱計詳解

熱釋電紅外傳感器探測物體的工作原理及適應性應用

紅外傳感器原理與應用
紅外傳感器的工作原理及應用
紅外熱電堆傳感器在什么領域用得多
物聯網系統中常見的非接觸人體感應方案_紅外傳感器詳解

被動紅外探測器接線方法
被動紅外探測器與主動紅外探測器的原理比較
紅外傳感器和超聲波傳感器有什么區別
紅外傳感器的主要優點有哪些
人體紅外傳感器輸出信號有哪些
人體紅外傳感器的數據屬于什么量
人體紅外傳感器的作用是什么
人體紅外傳感器能穿透玻璃嗎為什么
紅外傳感器技術深度解析:原理、分類、應用與選型策略





 工商網監
工商網監

評論