 三相電動機正回轉的原理說明
三相電動機正回轉的原理說明
很多機床的作業部件常需要做兩個相反方向的運動,這種相反方向的運動大多靠電動機的正回轉來完畢。三相電動機正回轉的原理很簡略,只需將三相電源中的恣意兩相對調,就可使電動機反向作業。
正反向作業線路又稱為雙向可逆線路,依據選用的主令電器紛歧樣,可分為按鈕操控和行程開關操控這兩大類。
1、開關操控的正、回轉線路
倒順開關是一種組合開關,圖2.13為HZ3-132型倒順開關的作業原理示意圖。
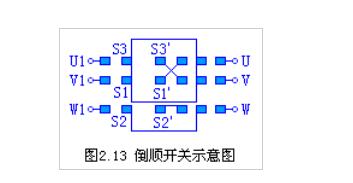
倒順開關有六個固定觸頭,其間U1、V1、W1為一組,與電源進線相連,而U、V、W為另一組,與電動機定子繞組相連。當開關手柄置于“順轉”方位時,動觸片S1、S2、S3別離將U-U1、V-V1、W-W1相銜接,使電動機正轉;當開關手柄置于“回轉”方位時,動觸片S1‘、S2’、S3‘別離將U-U1、V-W1、W-V1接通,使電動機完畢回轉;當手柄置于基當方位時,兩組動觸片均不與固定觸頭銜接,電動機中止作業。
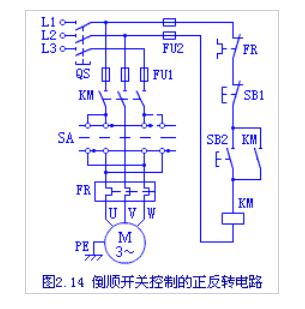
圖2.14是用倒順開關操控的電動機正回轉線路。其作業原理是:運用倒順開關來改動電動機的相序,預選電動機的旋轉方向后,再經過按鈕SB2、SB1操控觸摸器KM來接通和堵截電源,操控電動機的發起與中止。
倒順開關正回轉操控電路所用電器少,線路簡略,但這是一種手動操控線路,頻頻換向時操作人員的勞動強度大、操作不安全,因而通常只用于操控額外電流十A、功率在3kW以下的小容量電動機。出產實習中更常用的是觸摸器正回轉操控電路。
2、觸摸器操控的正、回轉線路
圖2.15為按鈕操控的電機正、回轉典型電路。從主電路看,兩個觸摸器KM1與KM2觸頭接法紛歧樣,因而當KM2觸頭閉合時,引進電機的電源線左、右兩互相換、改動了相序,使電機轉向改動。
圖2.15為按鈕操控的電機正、回轉典型電路。從主電路看,兩個觸摸器KM1與KM2觸頭接法紛歧樣,因而當KM2觸頭閉合時,引進電機的電源線左、右兩互相換、改動了相序,使電機轉向改動。
由圖可知,KM1和KM2觸頭不答應一同閉合,不然會致使電源兩相短路。為避免觸摸器KM1與KM2一同接通,在各自的操控電路中串接對方的動斷觸頭,構成互鎖聯絡。
a)圖是“泊車回轉操控電路”,由于電機正轉時,按下SB2使KM1得電并自鎖。此刻按下SB3也不能使觸摸器KM2得電。電機要回轉有必要先銨下中止按鈕SB1,使KM1失電,其動斷觸頭閉合,然后再銨下SB3,KM3才干得電,使電機回轉。
b)圖是“直接正回轉操控電路”。它運用復合按鈕的動斷觸頭別離串接于對方觸摸器操控電路中,不用運用中止按鈕過渡就能直接操控正回轉。但要留心,這種直接正回轉操控僅用于小容量電動機,拖動的機械設備翻滾慣量又較小的場合。
3、行程開關操控的正、回轉線路
圖2.16為行程開關操控的正回轉電路,它與按鈕操控直接正回轉電路類似,僅僅添加了行程開關的復合觸頭SQ1及SQ2。它們適用于龍門刨床、銑床、導軌磨床等作業部件往復運動的場合。
這種運用運動部件的行程來完畢操控的稱為按行程準則的主動操控或稱為行程操控。
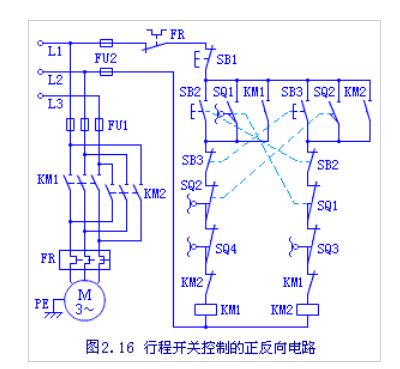
作業原理:按下正向發起按鈕SB2,觸摸器KM1得電并自鎖,電動機正轉使作業臺跋涉。當作業到SQ2方位時,撞塊壓下SQ2,SQ2動斷觸點使KM1斷電,SQ2的動合觸點使KM2得電動作并自保,電動機回轉使作業臺撤退。當撞塊又壓下SQ1時,KM2斷電,KM1得電,電動機又重復正轉。
圖中行程開關SQ3、SQ4是用作極限方位維護的。當KM1得電,電機正轉,運動部件壓下行程開關SQ2時,應當使KM1失電,而接通KM2,使電機回轉。但若SQ2失靈,運動部件持續前行會致使嚴峻事端。若內行程極限方位設置SQ4(SQ3裝在另一極點方位),則當運動部件壓下SQ4后,KM1失電而使電機中止。這種限位維護的行程開關內行程操控電路中有必要設置。
-
三相電動機
+關注
關注
2文章
66瀏覽量
12405 -
倒順開關
+關注
關注
3文章
29瀏覽量
6835
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論