 研究探索霧天、雨天對輔助駕駛性能的影響
研究探索霧天、雨天對輔助駕駛性能的影響
本文內容轉載自《紅外與激光工程》2020年第7期,版權歸《紅外與激光工程》編輯部所有。
摘要:綜合分析車載紅外輔助駕駛安全制動過程、紅外探測靜態性能模型和動態性能模型,建立了輔助駕駛安全行車視距模型;分析了輔助駕駛最大安全車速與路況環境、紅外探測性能之間的關系,發現其主要與滑動附著系數和探測距離相關;通過紅外探測距離的修正計算,對夜間最大安全車速進行了仿真分析,結果表明良好天氣條件下其主要受目標背景溫差的影響;以霧天和雨天為重點進行了實例分析,結果表明:霧天主要對探測距離形成影響,特別是能見度小于1 km時影響加劇,能見度500 m時最大安全車速可控制在21 ~ 25 km/h,雨天對探測距離和滑動附著系數均會形成影響,輔助駕駛應以紅外識別條件下的最大安全車速控制為主,降雨強度50 mm/h時最大安全車速可控制在12 ~ 14 km/h。
0引言
紅外成像技術由于具有穿透力強、環境適應性強和成像質量高等特點,在車輛輔助駕駛方面得到日益廣泛的應用。在民用領域,車載紅外輔助駕駛系統能夠大幅度提高汽車夜間行駛的效率和安全性,在凱迪拉克、通用、寶馬、紅旗等公司旗下的多種車型上得以成功應用;在軍事領域,借助車載紅外輔助駕駛系統,戰場上能夠實現夜間和惡劣天氣條件下的快速隱蔽機動,支持軍用車輛全天時、全天候作戰,自2004年開始,美軍、英軍、德軍等陸續研制了多種型號并大量裝備于軍事地面車輛。其中,輔助駕駛性能作為車載紅外輔助駕駛系統的核心性能,不僅關系到人車安全,更決定著系統效能的生成,對其展開深入的研究具有重要意義。
近年來,國內外對車載紅外輔助駕駛系統開展了廣泛的研究,如燕山大學的劉秋錦、電子科技大學的吳傳福、華南理工大學的邊二濤等對紅外車載夜視系統進行了研究設計;Brehar R、Hwang S、王國華等對車載紅外行人檢測算法進行了研究;LuYuesheng、Michelle A G等基于紅外成像技術進行了夜間車載行人探測系統的設計和實驗驗證;沈振一、范德營等對車載紅外視頻圖像的三維重建和彩色化進行了研究。但這些研究主要集中于系統設計、行人檢測算法、視頻圖像處理等方面,對輔助駕駛性能的研究較少。
對于紅外輔助駕駛系統、駕駛員、車輛和路況環境共同構成的動態系統而言,安全行車能力是輔助駕駛性能的關鍵指標,其核心體現于安全行車車速,受天氣條件影響極大。為此,文中開展車載紅外輔助駕駛性能研究,通過分析輔助駕駛安全制動過程及其影響因素,建立輔助駕駛行車視距模型,分析輔助駕駛最大安全車速與路況環境、紅外探測性能之間的關系,在對行車視距模型進行修正的基礎上,完成惡劣天氣下探測距離和最大安全車速的模擬仿真,研究探索霧天、雨天對輔助駕駛性能的影響。
1輔助駕駛安全行車視距模型
車載紅外輔助駕駛系統的應用場景主要是夜間或惡劣天氣環境,特別是應用于戰場燈火管制時,人眼觀察范圍極其有限,安全風險指數高,輔助駕駛過程中需保持足夠的行車視距,以確保前方遇到障礙物或突發情況時車輛能夠迅速制動。行駛車輛的制動過程一般可分為人員反應、制動延時和制動器作用三個階段,即:

式中:S為制動距離;S1、S2和S3分別為人員反應、制動延時和制動器作用過程中車輛行駛的距離。
車載紅外輔助駕駛系統一般由攝像頭和顯示器組成,安裝在車外的攝像頭拍攝路況圖像,傳輸至駕駛室內的顯示器供駕駛員觀察,在此過程中會存在視頻圖像的延遲。另外,由于紅外成像系統存在著非均勻性的問題,每隔一定時間需進行一次非均勻校正,如果非均勻校正發生于車輛制動階段,會延長制動過程。因此,車載紅外輔助駕駛的整個制動過程如圖1所示,可分為圖像延遲、非均勻自動校正、人員反應、制動延時和制動器作用五個階段。
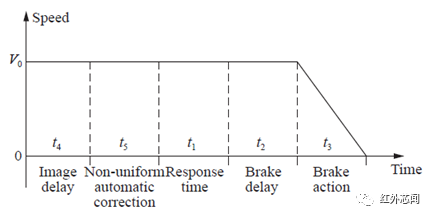
圖1 輔助駕駛制動過程
如果制動器作用前車速V0為,制動器起作用后車輛減速為α=?sg,其中g表示重力加速度,?s表示滑動附著系數。則車載紅外輔助駕駛制動距離可表示為:

式中:S4、S5分別表示圖像延遲和非均勻自動校正過程中車輛行駛的距離。假設車載紅外輔助駕駛系統的探測距離為R,為保證行車安全,則有:

式中:d為車輛制動結束后與前方障礙物或人員、車輛等所需保持的安全距離。
同時,車載紅外輔助駕駛系統觀察到前方路況信息,需滿足紅外探測系統實現目標探測的基本條件:(1)對于空間頻率為f的目標,它與背景的實際等效溫差在經過大氣衰減到達紅外探測系統時,不小于系統對應的最小可分辨溫差MRTD;(2)觀察目標對紅外探測系統的張角應不小于觀察等級所要求的最小視角。即:
式中:ΔTe為目標與背景的實際等效溫差;τa(R)為大氣透過率;H為目標高度;ne為觀察等級要求的目標等效條帶對數。
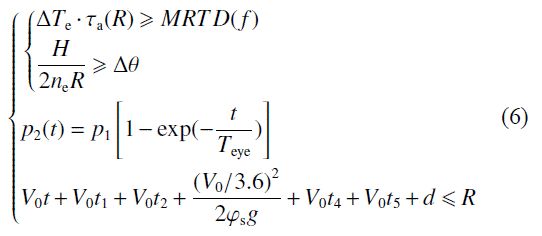
車載紅外輔助駕駛過程中,車載紅外輔助駕駛系統與路面目標處于相向運動的狀態,因此,在上述紅外靜態性能模型基礎上,進一步引入動態性能模型,其中,被廣為接受的紅外動態性能模型是CNVEO模型。假設探測過程中車輛為勻速運動,在時段內的動態探測概率p2為:

式中:p1為靜態探測概率;Teye為人眼的積分時間。
結合動態探測過程,則車載紅外輔助駕駛的安全行車視距模型可表示為:
2夜間輔助駕駛最大安全車速分析
從安全行車視距模型的建立過程可以看出,車載紅外輔助駕駛系統的安全車速與路面條件和探測距離有直接關系,最大安全車速Vmax滿足

式中:滑動附著系數?s與路面條件直接相關,常見路面土路和混凝土路的滑動附著系數如表1所示。
表1 常見路面類型的滑動附著系數

路況一定時,輔助駕駛的最大安全車速主要取決于動態探測概率和紅外探測器的探測距離。干燥土路面和干燥混凝土路面條件下,取動態探測概率p2 = 99%,探測距離對最大安全車速的影響如圖2所示。可以明顯看出二者的正相關關系,當探測距離分別大于190 m左右、160 m左右時,最大安全車速達到了120 km/h。
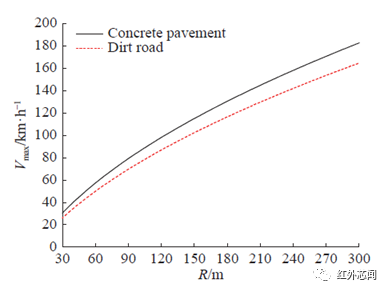
圖2 最大安全車速與探測距離的關系
為了進一步分析環境條件對最大安全車速的影響,需對探測距離R進行求解,求解之前首先對MRTD(f)進行修正。MRTD(f)的大小一般來自于實驗室測試或理論計算,通過車載紅外輔助駕駛系統實際觀察目標時,由于不滿足實驗室標準條件和理論計算理想條件,可對一些因子進行修正。
以噪聲等效溫差NETD為基礎,考慮熱成像系統全部電路的帶寬及人眼作用,MRTD(f)可表示為:

式中:SNRDT為閾值信噪比;MTFs(f)為熱成像系統總的調制傳遞函數;α、β分別為探測器橫向和縱向的角分辨率;τd為探測器的積分時間;fp為幀頻;Δfn為放大電路等效噪聲帶寬。
實驗室MRTD測試采用的是長寬比為7:1的四條帶標準靶,輔助駕駛過程中路面目標的實際高寬比不一定滿足理想條件,因此,需要進行目標形狀的修正。目標形狀修正因子為 ,其中,ε表示目標等效高寬比,與實際高寬比的關系可表示為:
,其中,ε表示目標等效高寬比,與實際高寬比的關系可表示為:
同時,實驗室MRTD測試采用的是恒定溫度為TT的黑體目標背景,輔助駕駛過程中需根據實際路面溫度Tm進行修正,修正因子為K2=TT/Tm。
車載紅外輔助駕駛系統對路面目標的靜態探測概率p1與閾值信噪比SNR有關,其關系為:

閾值信噪比修正因子為k3 = SNR/SNRDT。
修正后的MRTD(f)可表示為:
則有:
可以看出,最大安全車速Vmax的影響因素主要包括探測概率和、目標尺寸、目標與背景等效溫差、大氣透過率、目標高度、目標等效條帶對數。輔助駕駛過程中,為確保行車安全,可取靜態探測概率p1=100%。
目前,車載紅外輔助駕駛系統一般采用8 ~ 14 μm波段探測器,當探測距離為300 m時,通過LOWTRAN計算不同能見度下的大氣透過率,結果如圖3所示。可以看出,由于車載紅外輔助駕駛系統為近距離探測,天氣條件較好時能見度對大氣透過率的影響不明顯。
可見觀察等級和目標一定時,良好天氣下的最大安全車速主要與目標背景溫差有關。圖4為干燥土路面和干燥混凝土路面下,觀察等級分別為發現和識別時,最大安全車速與目標背景溫差的變化關系,仿真計算過程中基本參數值如表2所示。從圖中可以看出,隨著溫差的增大最大安全車速也明顯增大,且觀察等級為發現時的最大安全車速遠大于識別時。輔助駕駛過程中,為保證行車安全應以識別條件下的車速控制為主,當路況條件較好時可選擇發現條件下的車速控制。
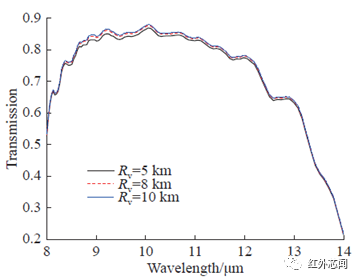
圖3 8 ~ 14 μm波段大氣透過率
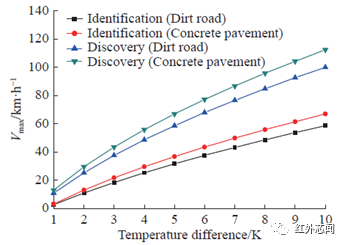
圖4 最大安全車速與目標背景溫差的關系
表2 仿真計算基本參數值

3惡劣天氣對輔助駕駛性能的影響
惡劣天氣條件對車載紅外輔助性能的影響,主要來自于兩方面,一是容易造成路面的潮濕和積水,對行車制動性能造成嚴重影響;二是大氣對紅外輻射信號衰減嚴重,導致探測器探測距離的下降。惡劣天氣下,大氣對紅外輻射的衰減主要由于大氣吸收、大氣散射和霧、雨等惡劣天氣條件引起的衰減。三種衰減因素影響下的光譜透τ(λ)過率與衰減系數μ(λ)均滿足波蓋爾-朗伯定律,即:

式中:?e(λ,R)為距離R處,目標背景輻射能量的光譜密度。吸收、散射和氣象衰減共同影響下的大氣光譜透過率即為三種大氣透過率的乘積。
由于車載紅外輔助駕駛系統屬于近距離探測,紅外輻射信號傳輸路徑相對較短,大氣吸收和散射對輻射信號傳輸的影響相對較小,大氣消光作用主要來自于惡劣天氣條件引起的衰減,造成大氣透過率的下降。對大氣透過率的計算,目前,大多數研究主要借助于經驗公式或專門的仿真軟件。由于大氣影響因素比較復雜,通過經驗公式計算時容易產生較大的誤差,因此,文中采用較為成熟的LOWTRAN大氣仿真軟件,對霧、雨天氣條件下的大氣透過率進行仿真計算。
3.1霧天對輔助駕駛性能的影響
霧是在高濕度條件下由小水滴或冰晶形成的水汽凝結物,紅外輻射在霧中傳播時,衰減系數主要取決于霧粒子濃度的大小,而霧粒子濃度的變化可通過能見度來表征。8 ~ 14 μm波段,不同能見度條件下霧天大氣透過率的仿真結果如圖5所示(LOWTRAN參數設置為:西安七月平均大氣模式,輻射霧消光系數,海拔高度350 m)。從圖中可以看出,當能見度由3 km到50 m變化時,大氣透過率明顯減小,特別是能見度降至50 m時,大氣透過率已經接近于0;對比圖3可以發現,當能見度為3 km時,霧對大氣透過率的影響已經相對不明顯。
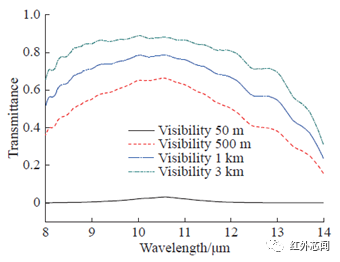
圖5 霧天大氣透過率
將8 ~ 14 μm波段的大氣透過率均值代入公式(12)進行仿真計算,目標背景溫差設置為5 K,其他參數設置見表2。霧天能見度對探測距離和最大安全車速的影響,分別如圖6和圖7所示。從兩張圖中均可以看出,探測距離和最大安全車速隨著能見度的增大均逐漸增大,且變化趨勢在能見度小于1 km時,比較急速,在大于1 km時比較平緩,說明當能見度小于1 km時霧天對探測距離的影響加劇。因此輔助駕駛過程中,當能見度小于1 km時應以識別條件下的最大車速控制為主;能見度大于1 km時,可根據路況情況選擇識別或發現條件下的最大車速。結合圖7可以看出,能見度為3000 m時,土路、混凝土路兩種路面下的最大車速分別達到33 ~ 61、38 ~ 70 km/h,能見度為500 m時,分別降至21、25 km/h。
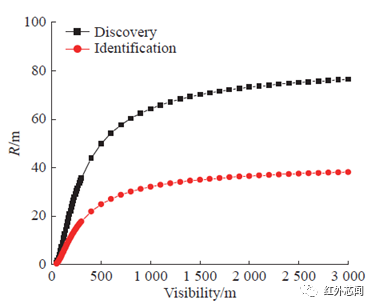
圖6 霧天能見度對探測距離的影響
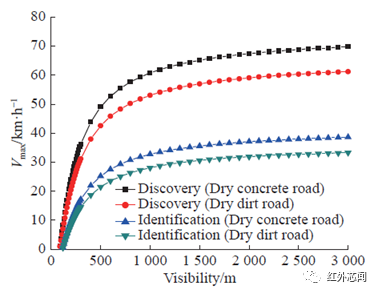
圖7 霧天能見度對最大安全車速的影響
3.2雨天對輔助駕駛性能的影響
雨天同樣會對紅外輻射信號形成衰減,從而影響車載紅外輔助駕駛系統的探測距離。同時,雨天還會造成路面的泥濘和濕滑,對滑動附著系數有很大影響,導致車輛制動性能的下降。如圖8所示,為雨天8 ~ 14 μm波段大氣透過率的仿真結果(LOWTRAN仿真參數設置為:西安七月平均大氣模式,鄉村消光系數,海拔高度350 m)。圖中顯示了不同降雨量時的透過率曲線,可以看出從5 ~ 40 mm/h變化時,大氣透過率明顯減小。同時,還可以發現輻射波長從8 ~ 14μm變化時,雨天的透過率曲線相對比較平緩,這是由于雨天粒子的尺寸要比霧滴的尺寸更大,其產生的衰減為非選擇性衰減,對8 ~ 14 μm整個波段都有明顯的衰減作用。
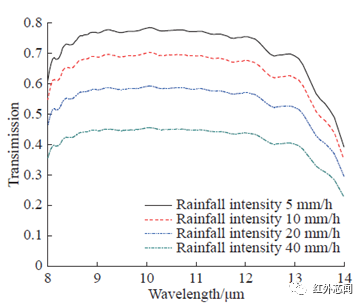
圖8 雨天大氣透過率
將8 ~ 14 μm波段的大氣透過率均值代入公式(12)進行仿真計算。雨天降雨強度對探測距離和最大安全車速的影響,分別如圖9和圖10所示。從圖9可以看出:隨著降雨強度的增大,車載紅外夜視系統對20 cm目標的探測距離逐漸減小,降雨強度為50 mm/h時發現距離、識別距離分別減小至36和18 m。對于混凝土路和土路,雨天會導致混凝土路面的潮濕、土路面的潮濕或泥濘,路面滑動附著系數減小(如表1所示)。如圖10所示,潮濕混凝土路、潮濕土路和泥濘土路三種路面下,隨著降雨強度的增大,由于夜視系統探測距離和路面滑動附著系數的減小,輔助駕駛最大安全車速均迅速減小。考慮到雨天駕駛安全風險較大,輔助駕駛過程中應區分路面狀況的同時以識別條件下的最大車速控制為主,降雨強度5 mm/h時,三種路面下的最大安全車速分別可達到27、24、22 km/h,降雨強度增大至50mm/h時分別降至14、13、12 km/h。
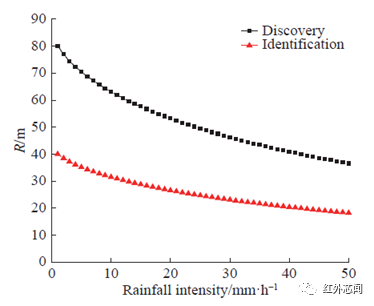
圖9 探測距離與降雨強度的關系
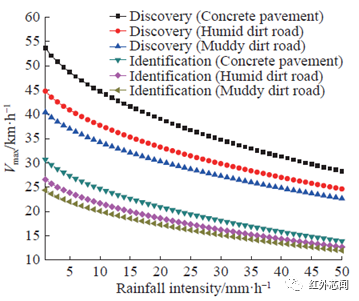
圖10 最大安全車速與降雨強度的關系
4結論
文中開展天氣條件對車載紅外輔助駕駛性能影響的研究,首先分析了輔助駕駛安全制動過程,綜合考慮輔助駕駛制動的五個階段、紅外探測靜態性能模型和動態性能模型,建立了輔助駕駛安全行車視距模型;對最大安全車速的影響因素進行了分析,發現主要與滑動附著系數和探測距離有關;對MRTD進行修正的基礎上,建立了最大安全車速與探測概率、目標與背景特性、大氣透過率、觀察等級等參數之間的關系,仿真分析發現:良好天氣下大氣透過率的影響較小,最大安全車速主要與目標背景溫差有關;最后,以霧天和雨天為重點進行實例分析,區分不同的觀察等級和惡劣天氣影響下的不同路面狀況,對探測距離和最大安全車速進行了模擬仿真;霧天影響下的仿真結果表明:能見度小于1 km時霧天對探測距離和最大安全車速的影響加劇,應以識別條件下的最大車速控制為主;雨天影響下的仿真結果表明:隨著降雨強度的增大,探測距離和路面滑動附著系數的減小,導致最大安全車速均迅速減小,且雨天輔助駕駛應區分路面狀況的同時以識別條件下的最大車速控制為主。文中研究成果可為車載紅外輔助駕駛性能的相關研究提供借鑒,也可為不同天氣條件下車載紅外輔助駕駛系統的使用提供技術支持。
原文標題:天氣條件對車載紅外輔助駕駛性能的影響
文章出處:【微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
-
探測
+關注
關注
0文章
210瀏覽量
20346 -
輔助駕駛系統
+關注
關注
5文章
85瀏覽量
17001
原文標題:天氣條件對車載紅外輔助駕駛性能的影響
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
ADAS高級駕駛輔助系統

如何實現單鍵帶雙擊除霧功能?

智能駕駛安全輔助系統介紹
鹽霧測試:評估金屬材料耐腐蝕性能的重要手段
如何選擇智能駕駛輔助系統
特斯拉發布Cybertruck首個駕駛輔助功能
上汽通用汽車NOP智慧領航輔助駕駛系統重磅上線
千億高級駕駛輔助市場不可或缺的技術,是提升LiDAR和ADAS性能的關鍵!

小米宣布SU7標配高速領航 全系標配智能輔助駕駛
Mobileye將為大眾旗下豪華品牌提供駕駛輔助軟件
小鵬汽車面向智駕經驗用戶即刻推送無限XNGP智能輔助駕駛功能
WTR-563 霧區車輛檢測雷達
特斯拉中國Model Y升級駕駛輔助功能

鹽霧耐久循環試驗箱的用途是什么






 工商網監
工商網監
評論