 基于AsKania KTH532電影經緯儀的數據記錄系統設計和應用分析
基于AsKania KTH532電影經緯儀的數據記錄系統設計和應用分析
作者:李變俠;曹劍中;楊小軍;田雁;唐運剛
高速攝影機是用于靶場火箭彈道和姿態測量的光測設備?高速攝影機的電控系統主要由同步控制?數據記錄?自動調光等系統組成,在攝影時統及攝影頻率控制下,實時?清晰地將目標及相關信息記錄在膠片上,為事后處理提供原始數據信息? 數據信息是以點陣的形式記錄在膠片上,傳統的數據記錄系統是在攝影時統控制下,同步地對方位角?俯仰角?時間?攝影頻率?同步信號?攝影編碼?站址?彈序等信息進行采集?處理并按要求的格式進行排列;最后,在攝影頻率控制下以分時掃描的方式逐行或逐列點亮點陣,將信息記錄在膠片上?如果因點陣亮度不夠或者其它原因而使膠片上某些點曝光不足,事后用判讀儀判讀時,可能造成錯判或誤判,最終導致錯誤的數據處理結果?用傳統的方法提高曝光不足點的亮度,同時會使該點同一行或同一列的其它點更亮,造成點與點之間邊緣不清晰,同樣會影響判讀?即便如此,有時某些曝光不足點的亮度仍不能滿足判讀要求?
基于上述問題,提出了一種新的設計方案,對點陣每一個點的點亮時間單獨進行控制,實現點陣曝光時間的單點控制?此方案在AsKania KTH532電影經緯儀改造中得以實現?
AsKania KTH532高速攝影機是20世紀70年代由法國設計制造的?其點陣數據記錄系統的點陣是5×22的LED陣列,以LED作為光源,由光纖傳輸投影到膠片上完成數據記錄?如果采用傳統的控制方法,用這套點陣及投影系統所打點陣均勻性極差,判讀儀無法進行數據處理,其主要原因是:
(1)用LED作為光源,由于自身參數有差異,導致亮度不均勻;
(2)原先的光學投影系統中光纖有老化及斷絲現象,在傳輸過程中,光學投影系統對點陣上每一個點的光能量的衰減不同,即使每個點的光照相同,仍不能保證每個點投影在膠片上的強度相同,所以不可能在膠片上產生相同的曝光量,即點的黑度不同,而且差異很大,點陣整體不均勻?
由于結構方面的原因,對數據記錄系統改造時必須延用這種方式不變,保留原先的光學投影系統?采用傳統的控制方法不能解決由于上述原因所帶來的點陣黑度不夠和不均勻的問題?所以在點陣數據記錄系統的改造中,運用了點陣曝光時間的單點控制方案,使點陣每一個點的曝光時間可以通過編程設定,大大提高了點陣的均勻性?
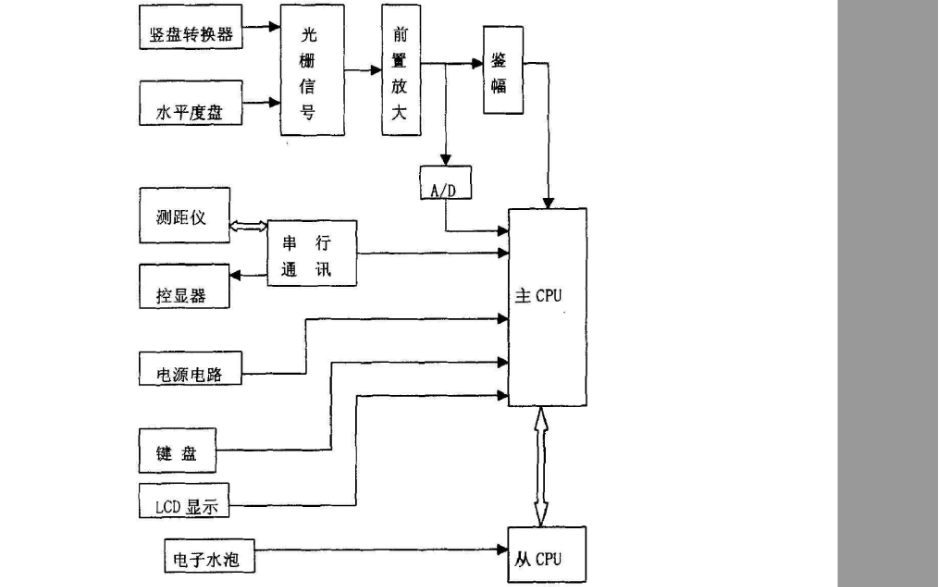
1 數據記錄系統的原理與組成
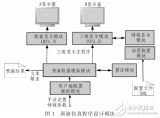
數據記錄系統的原理與組成如圖1所示?
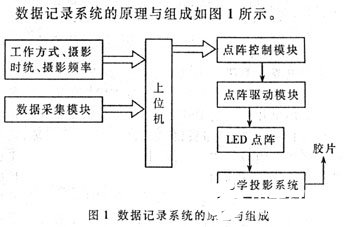
數據記錄系統主要由上位機?數據采集模塊?點陣控制模塊?點陣驅動模塊?點陣模塊?光學投影模塊組成?
數據采集模塊:數據采集模塊實現點陣信息的采集?主要是以80318031單片機為核心的下位機,在攝影時統的控制下,實時地對時間?方位角?俯仰角?同步信息?頻率編碼等信息逐個采集,然后存放在雙口RAM中,供上位機通過總線讀取? 上位機:通過總線對雙口RAM中的數據信息,按照要求的點陣排列格式進行排列,并對每個點的點亮時間進行編程設定,最后由點陣控制模塊逐行輸出?
點陣控制模塊:在上位機的控制下,按上位機對每個點曝光時間的設定,以及點的亮與滅,逐行輸出點陣控制信號到點陣驅動模塊?
點陣驅動模塊:點陣驅動模塊輸出的控制信號不能直接驅動點陣的LED,經驅動模塊產生驅動信號驅動點亮點陣的LED? 光學投影系統:將點陣LED的光能量傳輸到膠片,使膠片產生曝光,記錄數據?
點陣單點控制方案與傳統控制方案的主要區別在于點陣控制模塊不同?下面主要介紹點陣單點控制方案中,控制模塊和驅動模塊的軟硬件設計與實現?
2 控制模塊和驅動模塊的硬件設計與實現
傳統的點陣控制與驅動模式有:
(1)一次點亮?即每一個LED的陰極和陽極分別有一個控制信號,一幅點陣一次點完?這種方式所用時間最短,但控制電路和驅動電路都非常復雜,一般不采用?
(2)逐列掃描?逐列掃描即每次點亮其中的一列,一幅點陣分22次點完?這種方式比一次點亮的電路簡單,但所用時間比一次點亮時間長?
(3)逐行掃描?逐行掃描即每次點亮其中的一行,一幅點陣分5次點完?這種方式控制電路和驅動電路都最簡單,而且所占用時間界于前面兩者之間,一般多采用這種方式?
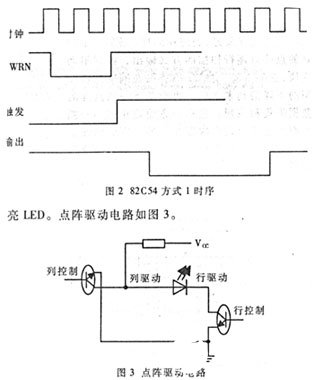
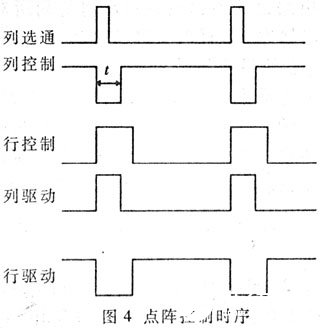
采用逐行掃描模式?為了確保點陣在膠片上的黑度和均勻性,若采用傳統的黑度調整方案存在以下問題:①減小串聯在LED中的限流電阻值,使通過LED的驅動電流增加,從而提高其亮度,提高膠片上淡點的黑度?但一方面AsKania KTH532點陣系統中,光學投影系統斷絲較多,點陣投影到膠片的過程中,對光能量損耗較大,一味地提高亮度會影響LED的壽命,而在極限電流范圍內的亮度又不足以補償部分斷絲對能量的損耗;另一方面因為選用逐行掃描方式,調整一列限流電阻會影響到5個點的亮度,所以這種方法并不可取?②延長LED的點亮時間,也就是延長曝光時間,提高淡點的黑度?同樣因為選用逐行掃描方式,調整一行的點亮時間會影響22個點的亮度?該方案設計的點陣控制電路,能使點陣每一個點的驅動信號通過編程控制,實現曝光時間的單點控制,從而實現單點黑度的調整,確保點陣均勻性? 點陣的22列對應地由22個82C5482C54定時器控制?由于該方案選用逐行掃描模式,所以22個82C54定時器分時控制著5行22列點陣的每一個點?82C54是一個可編程減法計數器,它有六種不同的工作方式,其中方式1(可編程單穩態特性)輸出單拍負脈沖信號,脈沖寬度可編程設定,滿足硬件電路的要求,其時序如圖2所示?在設定工作方式和寫入計數值后,輸出端輸出高電平;在觸發信號上升為高電平時,輸出為低電平,并開始計數;當計數器減為零時,輸出為高電平?定時器輸出負脈沖的寬度由定時器的計數值決定? 本方案中以列選信號作為定時器的觸發信號,定時器輸出為列控制信號,點陣22列LED的選通時間分別由22個定時器控制?點陣列控制信號經驅動反向產生列驅動信號,在行控制及列控制共同有效的情況下,點亮LED?點陣驅動電路如圖3? 如果是亮點,列選信號為“1”,觸發定時器計數,定時器輸出的控制信號為“0”,驅動信號為“1”,行選通后可以點亮點陣;如果不亮點,列選信號為“0”,定時器輸出的控制信號為“1”, 驅動信號為“0”,即使有行選通信號也不能使LED點亮?
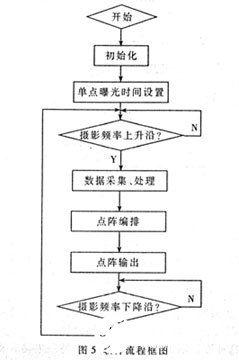
通過改變8254的計數值,可以改變列控制信號負脈沖的寬度,即改變驅動該列點亮的時間(圖4中t的大小)?采用這種方法既能避免使用復雜的控制電路和驅動電路,同時又能實現點陣亮度的單點控制,實現單點黑度的調整?時序及波形如圖4所示?
3 控制軟件的設計與實現
系統上電后,程序首先初始化,然后根據LED亮度及光學投影系統斷絲情況的不同,對點陣中每一個點的曝光時間進行編程設定,即給對應的定時器賦不同的計數值?點陣在攝影頻率控制下,對應每一幅畫面有一幅點陣,所以在攝影頻率上升沿到來之后進行數據采集?處理和編排?最后將編排好的點陣以逐行掃描的方式輸出,控制驅動模塊,點亮點陣?掃完一幅后,在判斷攝影頻率的下降沿到來之后,再準備下一幅點陣的數據采集和控制?這樣一方面防止在同一幅畫面上點陣出現多次曝光,另一方面保證了每一幅畫面上數據記錄的實時性?軟件流程框圖如圖5所示?
4 防串光措施
在實際中,為了減少故障,盡量簡化硬件電路?把點陣控制硬件電路設計為:每掃一行,將每列所對應的22個定時器同時觸發?這樣就帶來一個問題:由于8254是減法計數器,它的最小計數值是1,對于不需要點亮的點即使計數值為最小,定時器也會有一個負脈沖輸出,對應有一個LED點陣的驅動信號產生,行選通后導致點陣中不需要點亮的LED點亮,最終在膠片上產生曝光即串光現象,造成事后點陣判讀時誤判?為了消除此現象,采取了以下措施:
(1)硬件措施,在點陣列控制信號前端加一級光電耦合器,其延遲時間遠大于一個時鐘周期,使得8254輸出的很尖的負脈沖信號由于光電耦合器的延時而被濾掉,相應的列驅動信號為低電平,行選通后也因沒有列驅動而不能使對應LED 點亮,消除了串光現象的發生?
(2)軟件措施,在逐行掃描點亮點陣時,先用行選信號觸發8254,使不亮的點的列控制負脈沖輸出,并確保列控制電平已經翻轉為高電平時,再發出行選通信號,不該點亮的LED也不會被點亮? 采用防串光措施前后,點陣逐行掃描的時序對照如圖6?
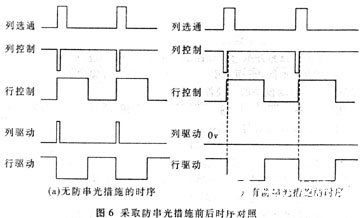
以上兩種方法可以選用其中一種,也可以同時使用?如只在硬件上采取措施,就必須選用延時足夠長的光電耦合器;如只在軟件上采取措施,則只需要在時間允許的情況下,在行選通之前加足夠的延時即可?
經在AsKania數據記錄系統改造運用后證明:該方案對光學投影系統斷絲較多?光能量損耗較大的點的曝光補償行之有效,使一些用常規的方案幾乎不產生曝光的點能夠有充足的曝光,點陣質量完全滿足判讀儀的要求?
責任編輯:gt
-
led
+關注
關注
242文章
23252瀏覽量
660585 -
數據采集
+關注
關注
38文章
6053瀏覽量
113623 -
攝影機
+關注
關注
0文章
66瀏覽量
10474
發布評論請先 登錄
相關推薦
GJ—341 經緯儀載車行駛平順性的測試與分析
信息融合技術在光電經緯儀中的應用
船載經緯儀視軸穩定方法的實現
基于DSP2812的經緯儀復合控制系統設計
基于DSP和FPGA的經緯儀控制系統設計
陀螺(經緯儀)定向
光電經緯儀可視化仿真系統的設計
經緯儀的作用及用途
經緯儀和全站儀的區別是什么
如何實現提高電子經緯儀的測量精度及進行誤差補償詳細設計資料說明





 工商網監
工商網監
評論