 關于無人機的機載任務載荷的問題探討
關于無人機的機載任務載荷的問題探討
一、任務載荷的定義
1、無人機裝載的實現無人機飛行要完成的特定任務的儀器、設備和分系統,統稱為無人機的有效載荷(Payload),或者叫任務載荷(Mission Payload)。
2、屬于無人機的核心部分,應該在無人機設計中起到主導地位。

二、載荷分類
(一)光電類:偵查監控、巡視;
(二)投放類:武器、人影、架線;
(三)獲取類:大氣監測、采樣;
(四)其他:通信、實驗、中繼。
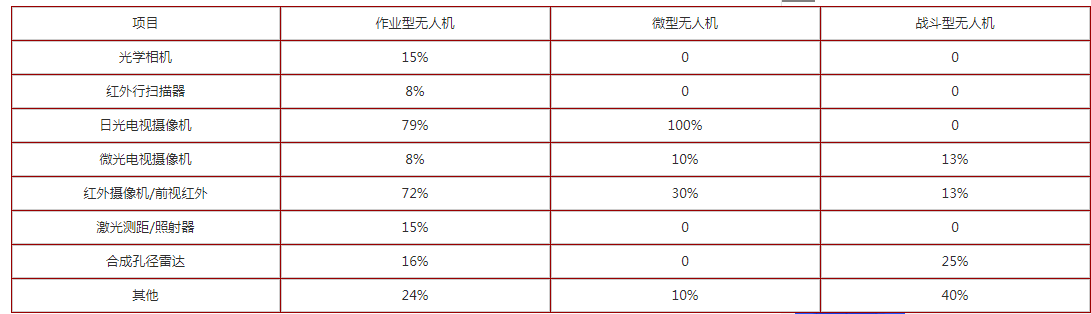
三、常用的光電傳感器
無人機的機載任務載荷是由無人機的尺寸和載重量以及任務需求所決定的。
常用的光電類任務載荷設備有可見光載荷、紅外熱像儀、紫外熱像儀、合成孔徑雷達、激光雷達以及多光譜相機等。
機載任務載荷根據無人機的不同用途而配置。
光電載荷的優點:
1、隱蔽性好。光電載荷采用電視或紅外工作模式,能夠主動或被動接收目標的形狀、亮度和熱輻射等信息,實現對目標的搜索跟蹤。
2、探測精度高。光電載荷的測角精度可以達到毫弧度(mrad),而雷達的測角精度一般在度(°)的數量級
3、圖像顯示直觀。光電載荷的顯控臺直接顯示目標的幾何圖像或熱圖像,也容易實現對目標的自動跟蹤。
4、設備少、質量輕。與雷達相比,光電載荷設備少、體積小、質量輕,而且采用模塊化結構,便于組裝維護,可靠性高。
四、可見光載荷
無人機可見光載荷主要分為光學相機和電視攝像機。
光學相機是一種經典的光學成像設備,也是最早裝在無人機使用的偵察設備。其最大的優點是具有極高的分辨率,目前其他成像探測器還無法達到。
無人機上使用的電視攝像機應用廣泛,其主要優點是體積小、質量輕、功效低、靈敏度高、抗沖擊震動和壽命長。該載荷常和紅外成像儀組成雙光吊艙系統,滿足全天候實時圖像監測需要。
五、紅外熱像儀
通過探測目標的紅外輻射,將目標的紅外圖形轉換為可見光圖形,發現并獲取目標參數。
紅外熱像儀通常和電視跟蹤器、激光測距器等組成綜合探測系統,用于探測、跟蹤目標,向火控計算機輸送目標的方位、仰角、距離信息。在這種綜合探測系統中,紅外熱像儀的主要作用是晝夜探測、監視、跟蹤目標。{#Content_Pages#}
六、紫外熱像儀
在高壓設備電離放電時,根據電場強度(或高壓差)的不同,會產生電暈、閃絡或電弧。電離過程中,空氣中的電子不斷獲得和釋放能量。當電子釋放能量即放電時,會輻射出光波和聲波,還有臭氧、紫外線、微量的硝酸等。紫外成像技術,就是利用特殊的儀器接收放電產生的紫外線信號,經處理后成像并與可見光圖像疊加,達到確定電暈的位置和強度的目的,從而為進一步評價設備的運行情況提供依據。
電暈是一種發光的表面局部放電,由于空氣局部高強度電場而產生電離。該過程引起微小的熱量,通常紅外檢測不能發現。紅外檢測通常是在高電阻處產生熱點。紫外成像儀可以看到的現象往往紅外成像儀不能看到,而紅外成像儀可以看到的現象往往紫外成像儀不能看到。因此,紫外成像技術與紅外成像技術是互補關系,紫外檢測放電異常,紅外檢測發熱異常,原理完全不同,各自具有不可互替的優點,檢測目的、應用方法也各具特性。
(1)運行中絕緣子的劣化以及復合絕緣子及其護套電蝕檢測;
(2)高壓變電站及線路的整體維護;
(3)支柱式絕緣上的微觀裂紋檢測;
(4)懸掛式瓷絕緣中的零值絕緣子檢測;
(5)評估絕緣設備表面的污穢程度;
(6)評估驗收高壓帶電設備布局、結構、安裝、設計是否合理;
(7)高壓輸變電設備上可能搭接的導電物體,如金屬絲;
(8)大型發電機定子線棒端部和槽壁電暈放電檢測;
七、合成孔徑雷
合成孔徑雷達(Synthetic Aperture Radar, SAR)通過向目標區域持續發射電磁脈沖,并接收來自目標區域的回波信號。首先對接收到的目標回波信號進行一些處理,通過成像技術得到目標區域中的形狀。根據不同的工作模式,SAR可以分為條帶式和聚束式兩種。
八、激光雷達
LiDAR(Light Detection And Ranging),即激光探測與測量,是利用GPS(Global Position System)和IMU(Inertial Measurement Unit,慣性測量裝置)機載激光掃描。其所測得的數據為數字表面模型(Digital Surface Model, DSM)的離散點表示,數據中含有空間三維信息和激光強度信息。應用分類(Classification)技術在這些原始數字表面模型中移除建筑物、人造物、覆蓋植物等測點,即可獲得數字高程模型(Digital Elevation Model, DEM),并同時得到地面覆蓋物的高度。
九、多光譜相機
多光譜照相機是在普通航空照相機的基礎上發展而來的。多光譜照相是指在可見光的基礎上向紅外光和紫外光兩個方向擴展,并通過各種濾光片或分光器與多種感光膠片的組合,使其同時分別接收同一目標在不同窄光譜帶上所輻射或反射的信息,即可得到目標的幾張不同光譜帶的照片。
多光譜照相機可分為三類:
(1)多鏡頭型多光譜照相機。它具有4-9個鏡頭,每個鏡頭各有一個濾光片,同時記錄幾個不同光譜帶的圖像信息;
(2)多相機型多光譜照相機。它是由幾臺照相機組合在一起,各臺照相機分別帶有不同的濾光片;
(3)光束分離型多光譜照相機。它采用一個鏡頭拍攝景物,用多個三棱鏡分光器將來自景物的光線分離為若干波段的光束。
十、常用的光電設備——光電吊艙

1、光電吊艙原理
飛機要在空中完成對目標的探測和跟蹤任務,需要一個機載平臺和搭載一個在該平臺上由探測設備組成的集成系統,在硬件表現形式上稱之為吊艙。
根據內置設備的功能,機載吊艙可以分為導航吊艙、跟蹤瞄準吊艙、紅外測量吊艙、電子干擾吊艙及電子情報吊艙等。飛機上的精確制導武器主要靠飛機上的跟蹤瞄準吊艙來指示目標。光電跟蹤瞄準吊艙是一個光電成像跟蹤系統,它的捕獲、跟蹤、瞄準(ATP)功能最后是通過跟蹤伺服系統來完成的。這個跟蹤伺服系統主要由光電傳感器系統、信號處理和控制系統和跟蹤穩定系統(穩像系統)三個部分組成。
無人機光電吊艙是無人機吊艙中的一種,一般由可見光相機、紅外機芯、信號處理單元、圖像壓縮單元、穩定平臺單元等組成,有拍照和攝像的功能,可實現全天候對遠距離目標的追蹤、攝像、監控。無人機光電吊艙運用的技術種類較多,并且根據功能不同,技術類型也略有不同,最常用的、具有代表性的技術有三種:紅外熱成像技術、數字圖像處理技術、動態目標跟蹤技術。
2、光電吊艙陀螺穩定系統
主要包括三大部分:
(1)主體儀器:穩像系統的主體儀器是兩軸支撐的常平架結構,內環(水平環)用于安裝光電測量儀器,外環(方位環)垂直安裝在基座上。兩環的轉動軸正交,兩環上分別安裝一只二自由度撓性陀螺儀,通過鎖定回路構成速率陀螺,用以測量兩軸的轉動角速度。
(2)控制放大器:控制放大器根據操作指令和跟蹤目標的脫靶量控制兩環上的驅動電機轉動,使測量儀器的光軸始終對準目標。
(3)脫靶量計算單元:脫靶量計算單元根據光電跟蹤儀器測量的圖像,計算目標的脫靶量,輸入控制器作為系統位置環的輸入量。
3、圖像處理技術
基于圖像信息的目標跟蹤,簡稱為圖像跟蹤,是以圖像處理技術為核心,有機融合了計算機技術、傳感器技術、模式識別、人工智能等多種理論和技術的新型的目標識別跟蹤技術。它依靠成像技術,可以獲取更加豐富的目標信息、有極強的抗干擾能力、以及良好的全天候作戰能力。能夠利用目標與真實空間信息之間的相互關系,有效地減小機動估計延時、提高跟蹤性能。因此,這種基于圖像傳感器及圖像處理的直接機動估計方法具有廣闊的發展前景。圖像跟蹤基本上可分為波門跟蹤、相關跟蹤、基于目標運動模型的濾波器跟蹤三種方式,其中以第三種跟蹤方式應用最為廣泛,效果最好。
無人機光電吊艙主要應用于森林消防、農業、環保、應急、電力巡檢等領域,其中電力巡檢,消防部門(包括消防、森林防火的過),武警、公安應急救援部門是目前需求量最大的三個領域。隨著無人機市場的快速發展,以及無人機應用領域的不斷拓寬,無人機光電吊艙市場需求量不斷增長,行業未來仍有較大的發展空間,發展前景看好。中國企業應該與高校、研究機構進行聯合,推進“產學研”一體的技術研發策略,為企業提供技術支持,降低技術投入成本,同時推動國內無人機光電吊艙技術水平的提高。
編輯:hfy
-
光電傳感器
+關注
關注
9文章
683瀏覽量
41905 -
圖像處理
+關注
關注
27文章
1289瀏覽量
56724 -
無人機
+關注
關注
229文章
10422瀏覽量
180171 -
紅外熱像儀
+關注
關注
12文章
546瀏覽量
33222
發布評論請先 登錄
相關推薦
第四集 知語云智能科技無人機反制技術與應用--無人機的組成與工作原理
無人機開發方案要領與電路圖集錦
無人機遙感技術
無人機遙感技術
國際無人機的新聞
航模/無人機遙控的解決方案
無人機云臺電機是什么電機?
無人機仿真總體概述
全球首個IEEE1937.1無人機載荷接口標準促進無人機產業的發展
無人機載成像光譜儀的詳細介紹
無人機載電源轉換模塊推薦
無人機應用深度報告

紅外無人機載荷核心指標——SWaP

無人機機載高光譜成像系統的應用及優勢





 工商網監
工商網監
評論