 智能車模電機驅動上制動電阻的作用分析
智能車模電機驅動上制動電阻的作用分析
制動電阻也稱為動能制動電阻(dynamic braking resistor),它主要是將被制動的機械系統的機械動能耗散在功率電阻上以制動機械系統。為什么在某些伺服電機驅動器上有制動電阻?在智能車模電機驅動上是否也需要加制動電阻?
制動電阻也稱為動能制動電阻(dynamic braking resistor),它主要是將被制動的機械系統的機械動能耗散在功率電阻上以制動機械系統。
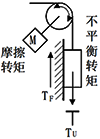
當由電機驅動的機械系統在制動狀態時,此時電機就會轉換成發電機,它將機械系統的制動力矩轉換成電能。如果電機的驅動系統不具備逆變功能,即將電重新轉換成一次能源回饋到電網,或者蓄電池內,那么只能通過功率電阻來消耗掉制動能量。否則這些能量無處可去,就會造成驅動電路內部過壓,過流,損壞驅動電路。
本質上講,小型車模在減速制動的時候,車模的動能也需要被消耗掉,車模才能夠停止。
車模動能消耗的途徑包括有:模輪胎與地面的摩擦阻力、車模電機到車輪的傳動阻力、電機吸收機械能轉變成電能消耗在驅動電路中、轉變成電能重新反充到車載電池中。
在一個車模輪子上增加有一個質量塊,來模擬整車運行時慣性質量。通過齒輪上的光碼盤可以測量車輪轉速。下面通過實驗可以看一下車輪減速時的情況。
車模減速最簡單的一種情況,就是不再給電機施加驅動電壓。即將電機與驅動電路斷開。如果電機驅動模塊有使能端,將使能端至于緊致狀態,驅動模塊輸出端口呈現高阻狀態,此時相當于將電機從電路中斷開。
車模的機械動能只能消耗在與地面的摩擦力以及傳動系統的阻力中。一般情況下,摩擦阻力與速度無關,是一個常量,所以車輪減速加速度是一個恒定值。車速直線下降。
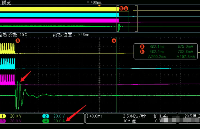
下圖顯示了電機從驅動電路斷開之后,速度下降的情況。
上圖顯示,電機近似勻速減速,經過大約1秒鐘,速度減少到0。這是依靠車模內部機械摩擦力消耗動能,減速過程有點慢。
車模減速的第二種情況,就是講電機驅動電壓降至0,此時相當于將電機兩端短路。電機轉動所產生的反向感應電動勢就會通過驅動電路形成回路,產生制動阻尼電磁力矩。
此時電機的動能,一部分就通過電機制動力矩轉換成電能,消耗在驅動電路中。由于增加了電機制動力矩,車模停止速度就加快了。下圖顯示了電機驅動電壓降低到0時,減速曲線,速度降低到0只需要0.5秒。
由于電機制動電流與反向感應電動勢成正比,也就是與轉速成正比,所以電機制動力矩與速度成正比,呈現阻尼特性。速度下降不再是線性下降。
這種情況下,電機轉子內阻、驅動電路功率管內阻就形成了制動電阻,消耗了所有電機制動發出的電能。由于車模質量比較小,這部分能量還不足以燒壞電機和驅動電路。如果車模質量進一步增大,這種制動方式就會出現危險。
好在車模比較小,所以為了進一步加快制動效果,還可以通過反向施加電壓來提高電機制動力矩。下面是通過施加相同的反向電壓,車模速度的變化情況。

上圖可以看出,車模的速度下降更快,從正轉變為反轉。如果是為了停止車模,則需要在車輪轉速出現反轉時停止施加反向電壓,及時停止車模。
下圖對比了以上三種制動方式:電機與驅動電路斷開、電機驅動電壓為0、施加反向電壓。

反向施加電壓減速最快。在同樣的轉速下,施加反向電壓只需要0.2秒左右就完成車模停止。
施加方向電壓的大小與車模停止時間之間的關系如下圖所示。一方面反向電壓越大,車模停止時間越小。但當反向電壓超過一定數值之后,停止時間就趨向于常數。這是由于電機內部的電感、電阻阻礙了制動電流快速增長的原因。

上面三種方式制動,車模的動能都會消耗在摩擦阻力、電機內阻和驅動電路內阻中,不會產生再生電能反充到車模電池中。
如果希望將車模動能反充到電池中再利用,則需要制動時,將電機兩端的驅動電壓降低,但不到0,或者反向,此時電機的感應電動勢就會通過驅動電路逆變電能,反充到驅動電路母線上。如果母線上有蓄電池,這部分電能將會反充到電池內。
下面動圖顯示電機電壓突然降低時,電機驅動電流變化。

電機驅動電壓突變時,電機電流也會都突變,基本上突變前期都是反向電流。如果電機驅動電壓沒有突變到0,或者反向,此時反向電流就會形成再生電能,反向回饋到驅動電路母線上。如果機械運動系統動能很大,再生電能就會很可觀。
將再生電能重新逆變到電網,或者蓄電池中則可以節省能源。

對于中小功率的伺服電機,為了減少設計成本,一般不包括逆變電路。所以只能將制動再生電能通過電阻消耗掉。
對于小型的車模,制動電阻也可以省略掉,直接使用電機內阻和驅動電路板內阻還消耗再生電能。
編輯:hfy
-
電機驅動
+關注
關注
60文章
1216瀏覽量
86731 -
伺服電機
+關注
關注
85文章
2046瀏覽量
57829 -
制動電阻
+關注
關注
0文章
66瀏覽量
12955
發布評論請先 登錄
相關推薦
電阻率在電機設計中的作用 電阻率實驗的步驟和注意事項
制動斬波器的工作原理 EAK制動斬波電阻器

電源反接制動和倒拉反接制動有何異同點
奧創變頻器的制動單元是有哪些作用






 工商網監
工商網監
評論