


許多數據采集、工業控制和儀表應用都需要超高速模數轉換器 (ADC),而逐次逼近寄存器 (SAR) 轉換器則能完全滿足這一要求。然而,我們必須確保 SAR 轉換器周圍的外部電路也能勝任這一任務,才能確保成功的轉換結果。對于 SAR 轉換器來說,需要特別注意的關鍵端子是其模擬信號輸入端——如果不加以重視,這些輸入引腳會產生穩定性問題和電容電荷“反沖”,從而導致轉換不準確并延長信號采集時間。
在 SAR 轉換器應用中,精確控制輸入信號的解決方案在于運算放大器(運放)的驅動。如搭配適當的輸出電阻和電容值,這些器件就是高分辨率、16 位和 20 位 SAR 轉換器系統的高精度穩健解決方案的基礎。
本文將簡要討論實現穩定準確的 SAR ADC 轉換的相關問題。然后,介紹一款合適的運放來驅動 SAR ADC,并說明如何實現必要的輸入驅動電路。我們將以 Analog Devices 的解決方案為例進行說明。
SAR ADC 輸入電路
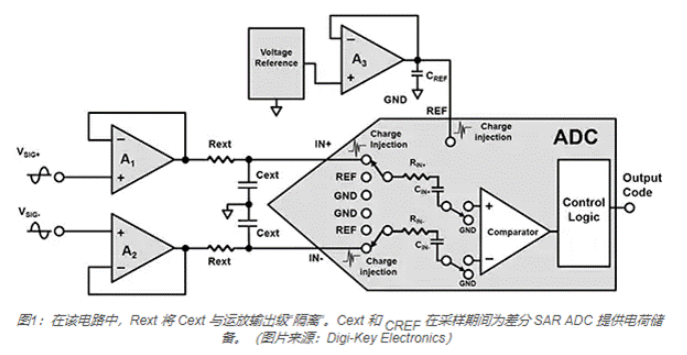
SAR ADC 驅動電路具有將 ADC 與其信號源隔離的運算放大器(A1 和 A2)(圖 1)。在該電路中,Rext 通過“隔離”放大器的輸出級與 ADC 容性負載(CIN+ 和 CIN-)和 Cext 隔離來保持穩定。Cext 和 CREF 為 ADC 提供了一個近乎完美的輸入源,可以吸收來自 IN+、IN- 和 REF 輸入端子的開關電荷注入。輸入端子 (IN+, IN-) 在轉換器的采集期間跟蹤輸入信號 (VSIG+, VSIG-) 的電壓,為 ADC 輸入采樣電容 CIN+ 和 CIN- 充電。
以 Analog Device 的 AD7915 (16 位)和 AD4021(20 位)SAR ADC 為例觀察 ADC 內部,可以看到該器件使用了電荷再分配數模轉換器 (DAC)。容性 DAC 有兩個相同的二元加權電容陣列。這兩個電容陣列連接非反相和反相比較器輸入端(圖 2)。
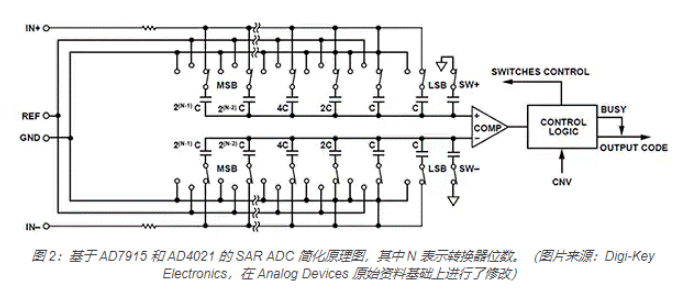
在采集階段,輸入端(IN+ 和 IN-)切換到電容陣列。此外,SW+ 和 SW- 閉合,將最小有效位 (LSB) 電容與地 (GND) 相連。在這種狀態下,電容陣列成為采樣電容,采集 IN+ 和 IN- 模擬信號。采集階段結束后,控制邏輯(右側)的 CNV 輸入變為高電平,啟動轉換階段。
轉換階段開始時,先斷開 SW+ 和 SW-,將兩個電容陣列切換到 GND。在這種配置下,捕獲的 IN+ 和 IN- 差分電壓會導致比較器變得不平衡。電荷再分配 DAC 在 GND 和 REF 之間有條不紊地將電容器陣列的每個元件從最重要的位 (MSB) 切換到 LSB。比較器輸入按二元加權電壓步長來變化 (VREF/2N-1, VREF/2N-2.。.VREF/4, VREF/2)。控制邏輯將開關從 MSB 切換為 LSB,使得比較器回到平衡狀態。這個過程結束后,ADC 返回采集階段,控制邏輯產生 ADC 輸出代碼。
輸入電荷注入、電路穩定性和驅動 AD7915 ADC
轉換過程的關鍵是獲取準確的輸入信號電壓。當驅動放大器準確地向輸入電容器 CIN+ 和 CIN- 進行充電時,ADC 數據轉換過程就會順利進行,同時保持穩定,直至 ADC 采集時間結束。對設計者來說,問題在于 ADC 的輸入端引入了一個電容 (CIN+, CIN-) 以及需要驅動放大器進行管理的開關噪聲或“反沖”電荷注入。
放大電路 Bode plot 可以快速估算電路穩定性。Bode plot 工具可以近似地描述放大器的開環和系統閉環增益傳遞函數的大小(圖 3)。
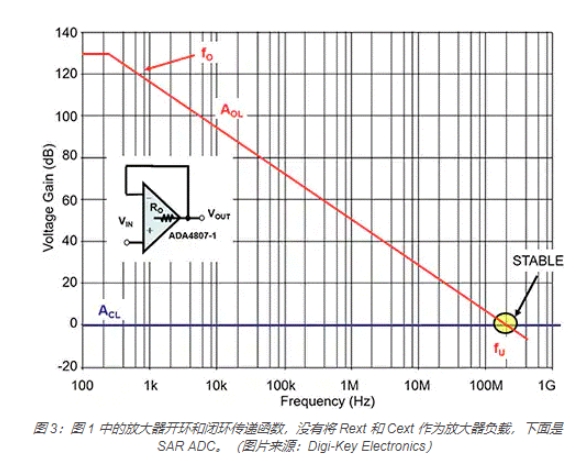
y 軸量化了放大器電路的開環增益 (AOL) 和閉環增益 (ACL),其中放大器的 AOL 曲線從 130 分貝 (dB) 開始,閉環增益 ACL 等于 0dB。沿 X 軸的單位以對數形式量化了從 100 赫茲 (Hz) 到 1 千兆赫茲 (GHz) 的開環和閉環增益頻率。
在圖 3 中,放大器在大約 220Hz (fO) 時的直流開環增益以 -20dB/ 十倍頻程的速度從 130dB 下降。隨著頻率的增加,這種衰減在持續并在大約 180 兆赫茲 (MHz) 時跨過 0dB。由于這條曲線表示單極系統,所以分頻器頻率 fU 等于單位增益穩定放大器的增益帶寬乘積 (GBWP)。該圖代表一個穩定的系統,因為 AOL 和 ACL 的截止率是 20dB/ 十倍頻程。
加入 Rext 和 Cext 以及 SAR ADC 后,通過創建系統零點和極點來修改放大器電路(圖 4)。該系統包括一個 16 位、每秒 1 兆次 (MSPS) 的 AD7915 差分 PulSAR ADC 和一個 180 MHz、軌至軌輸入 / 輸出 ADA4807-1 放大器,該器件由 Analog Devices 提供。由于存在 30 皮法 (pF)(典型值)的 ADC 輸入電容負載,放大器和 ADC 的組合需要 Rext。該電路還需要 Cext 作為充電筒,在 ADC 輸入端提供足夠的電荷,以準確匹配輸入電壓。
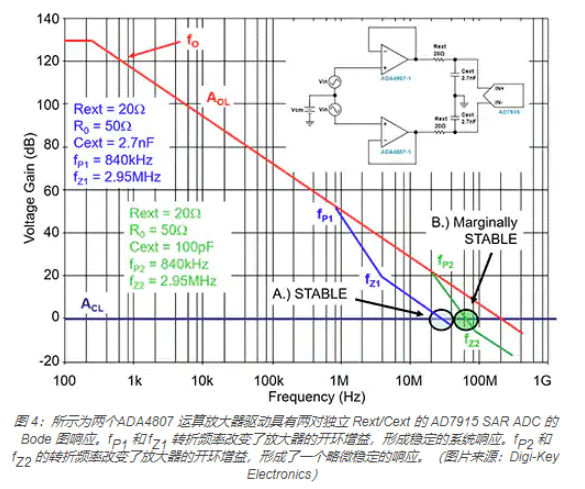
如圖 4 所示,由于電路在初始采集時 ADC 的電容負載和 ADC 的開關電荷注入,有可能發生振蕩。Rext/Cext 放大器輸出元件所產生的額外極點和零點保證了系統穩定,所以開環和閉環增益曲線交點大于 20dB/ 十倍頻程,使相位裕度小于 45°。這種配置與 fP2 和 fZ2 一起構成一個不穩定電路。
為避免不穩定,在評估電路中帶有 Rext 和 Cext 的放大器開環增益曲線時,設計人員需要考慮放大器的開環輸出電阻 RO 的影響。阻值為 50 歐姆 (W) 的 RO 與 Rext、Cext 的組合通過引入一個極點(fP,公式 1)和一個零點(fZ,公式 2)來修正開環響應曲線。RO、Rext 和 Cext 的值決定了 fP 的轉折頻率。Rext 和 Cext 的值決定了零轉折頻率 fZ。
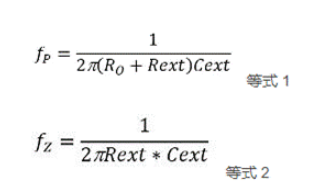
fP 和 fZ 的計算結果是:
fP1 = 842 kHz
fZ1 = 2.95 MHz
其中:RO = 50 W
Rext = 20 W
Cext = 2.7 納法拉 (nF)
fP2 = 22.7 MHz
fZ2 = 79.5 MHz
其中:RO = 50 W
Rext = 20 W
Cext = 0.1 nF
上述 fP1 和 fZ1 的值使 AD7915 和 ADA4807-1 成為一個穩定的系統。
驅動 Easy Drive AD4021 SAR ADC
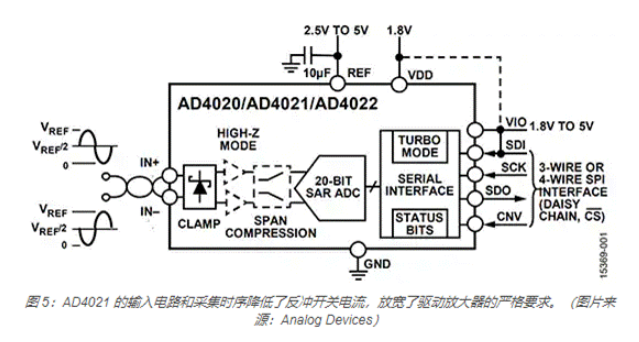
AD7915 的替代產品是 AD4021 20 位 1 MSPS Easy Drive SAR 轉換器。AD4021 器件系列將輸入反沖和輸入電流顯著降低至 0.5 微安 (μA)/MSPS。Easy Drive 器件的特點是能降低功耗和信號鏈復雜性。
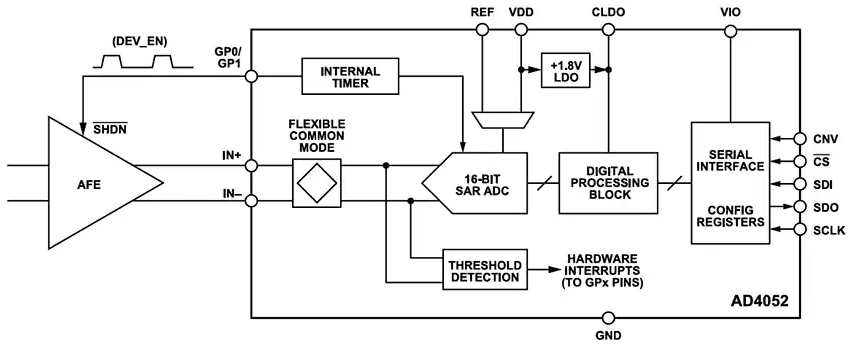
AD4021 的模擬輸入端采用了能夠降低典型開關式電容 SAR 輸入非線性電荷反沖的電路。因為減少了反沖并延長了采集階段,因此可以使用較低帶寬、較低功率的驅動放大器(圖 5)。
減少反沖并延長采集時間,也使得輸入電阻電容 (RC) 濾波器中的 Rext 電阻值增大,Cext 電容相應減小。這種較小的 Cext 放大器負載組合提高了穩定性,降低了功耗。
使用單路 5 伏電源的 AD4021 的推薦連接圖似乎具有類似電路圖。但對放大器的要求降低了,Rext/Cext(R 和 C)的值更小(圖 6)。
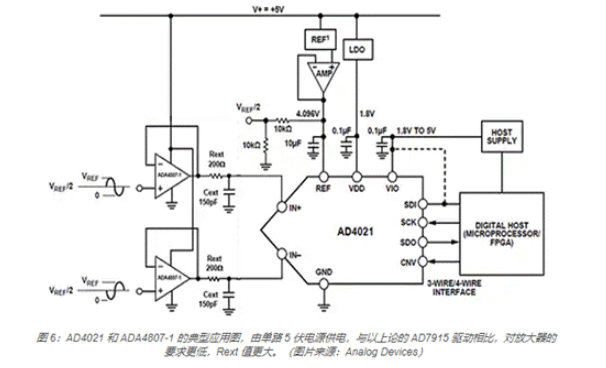
圖 6 中,基于 SAR 的 AD4021 也采用了電荷再分配采樣 DAC。ADC 有一個板載轉換時鐘和串行時鐘。因此,轉換過程不需要同步時鐘 (SCK) 輸入。這種時鐘配置可以延長采集時間,通過為輸入信號提供更長的時間使其建立至最終值,從而提高精度。
AD7915 和 AD4021 的驅動放大器主要考慮的是噪聲,因為放大器 /Rext/Cext 組合必須從滿量程階躍到 16 位水平 (0.0015%, 15ppm) 的 AD7915,以及 20 位水平 (0.00001%, 1ppm) 的 AD4021。
為了保持 AD7915 和 AD4021 的信噪比( SNR) 性能,驅動放大器的噪聲必須小于 ADC 噪聲的三分之一。AD4021 的噪聲為 60 微伏有效值 (mVrms),這就要求放大器 /Rext/Cext 組合的噪聲小于 20mVrms。AD4021 的噪聲為 31.5 mVrms,這就要求放大器 /Rext/Cext 組合的噪聲小于 10.5 mVrms。
Analog Devices 的精密 ADC 驅動器工具可幫助設計人員快速計算出正確的 Rext 和 Cext 值。通過選定的驅動器和 ADC,該工具可以模擬電路的建立時間、噪聲和失真行為。
結語
SAR ADC 將繼續在超高速數據采集、工業控制和儀器儀表應用中占據主導地位。然而,我們需要考慮這類器件的外部輸入電路——驅動放大器和輸入濾波器,以適應潛在的開關電荷注入和放大器穩定性問題。
大多數 SAR 轉換器(如 AD7916 和 AD4021)精確控制輸入信號的解決方案都依賴運放驅動器,如本示例中的 ADA4807-1。如圖所示,這類器件在適當的輸出電阻和電容值的支持下形成一個堅實的基礎,然后在此基礎上建立一個高精度、穩健、高分辨率、16 位或 20 位 SAR 轉換器系統。
編輯:hfy
-
轉換器
+關注
關注
27文章
9097瀏覽量
152033 -
SAR
+關注
關注
3文章
427瀏覽量
46951 -
隔離放大器
+關注
關注
6文章
257瀏覽量
65187
發布評論請先 登錄
Analog Devices Inc. AD9217射頻模數轉換器數據手冊
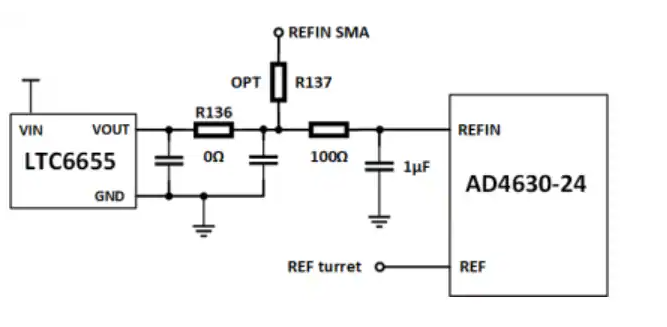
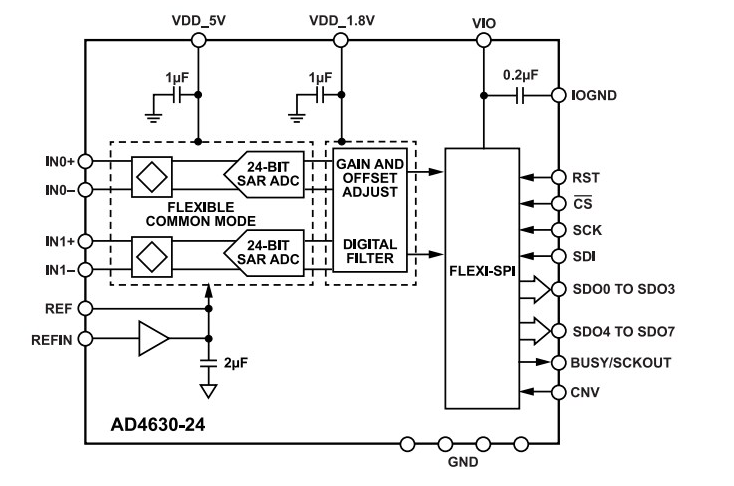
Analog Devices Inc. EVAL-AD4630-24 SAR ADC評估板特性/參考電路
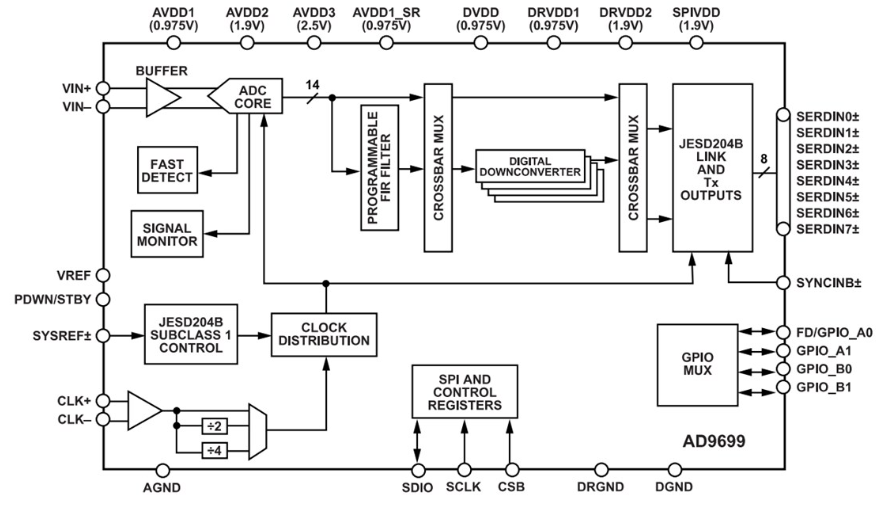
Analog Devices Inc. AD9699 14位3GSPS模數轉換器數據手冊
Analog Devices Inc. AD4630-16/AD4632-16雙通道16位SAR ADC數據手冊
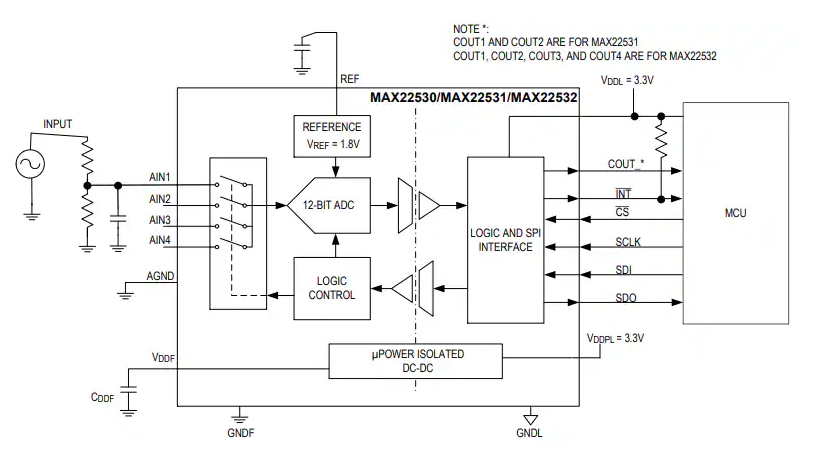
Analog Devices / Maxim Integrated MAX22531 4通道12位隔離式ADC特性/應用
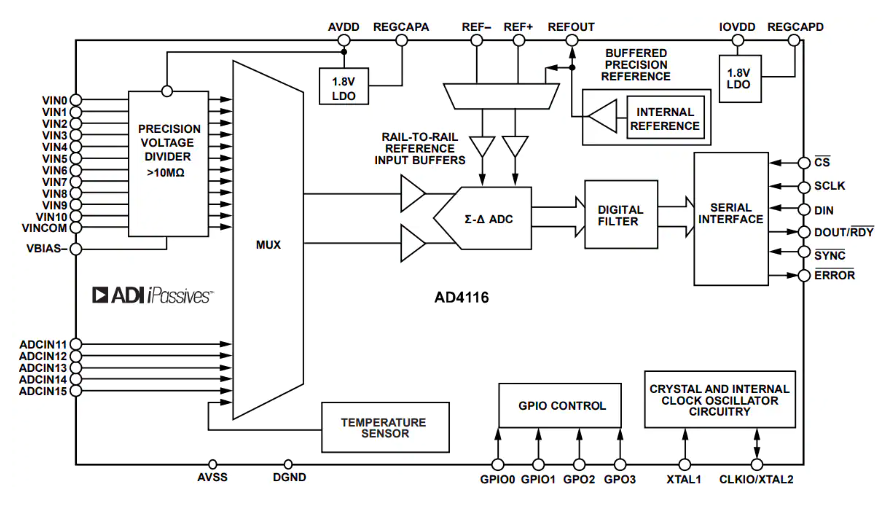
Analog Devices Inc. AD4116模數轉換器 (ADC)數據手冊
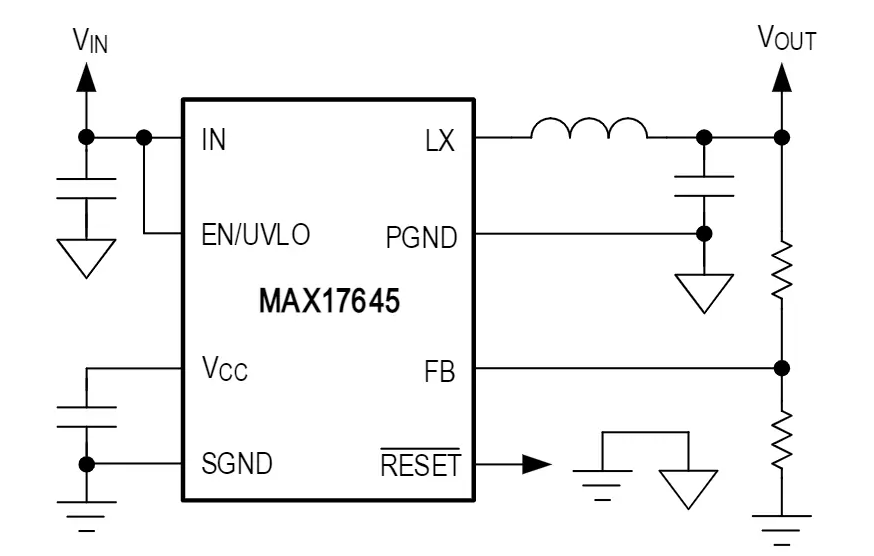
Analog Devices / Maxim Integrated MAX17645同步降壓直流-直流轉換器數據手冊
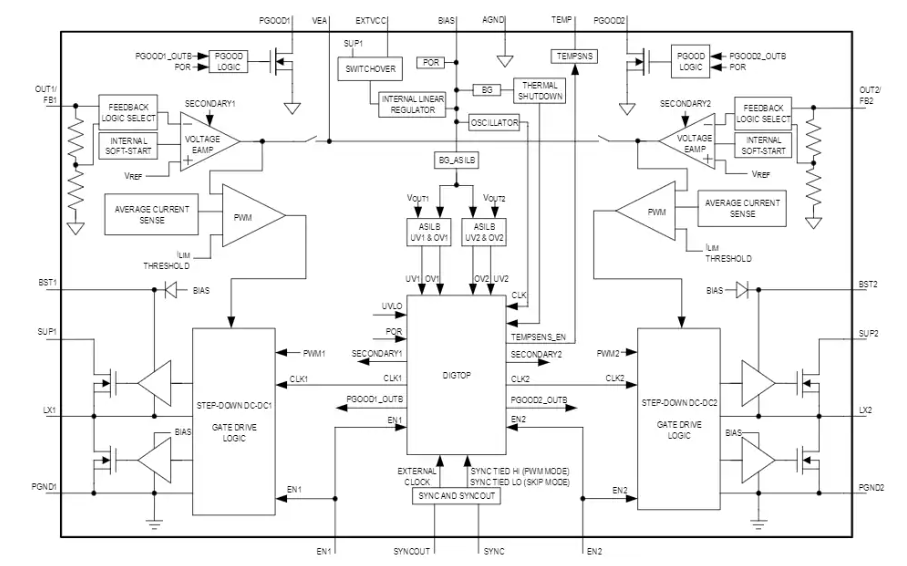
Analog Devices / Maxim Integrated MAX25255同步降壓轉換器數據手冊
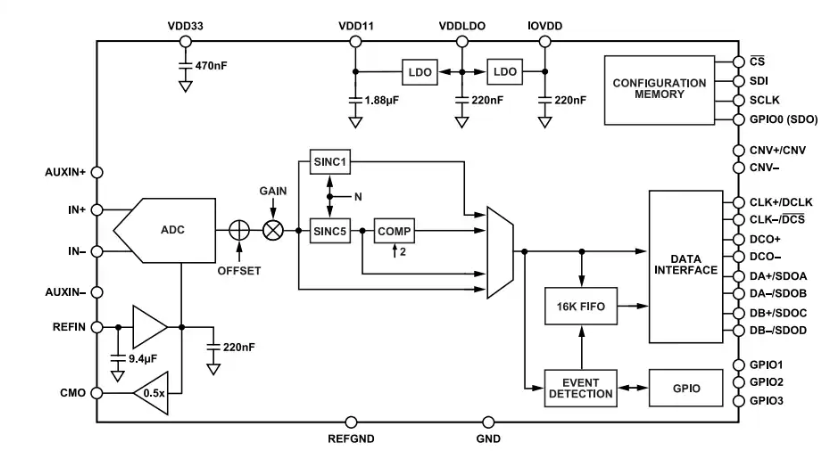
Analog Devices Inc. AD4080差分SAR ADC數據手冊
Analog Devices Inc. AD4052緊湊型低功耗Easy Drive SAR模數轉換器數據手冊
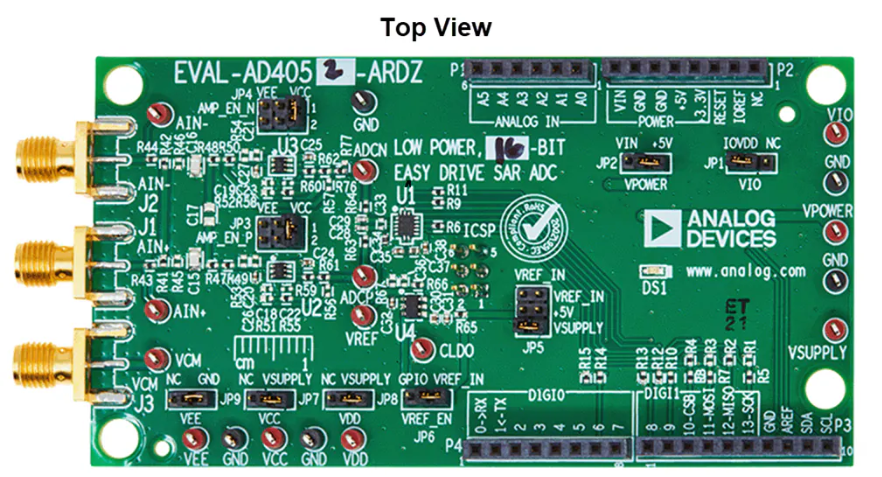
Analog Devices Inc. EVAL-AD4052-ARDZ評估板(用于AD4052)數據手冊
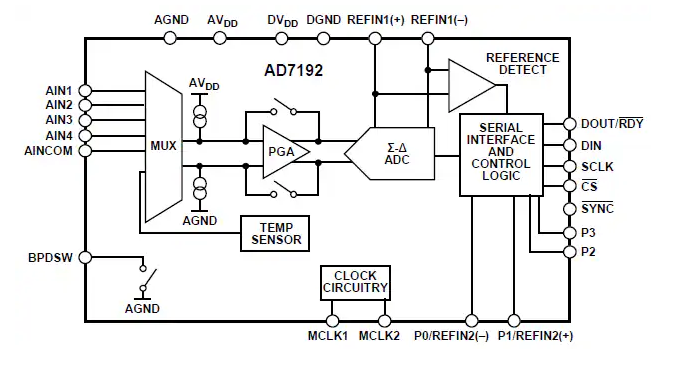
Analog Devices Inc. AD7192內置PGA的24位Σ-Δ ADC數據手冊
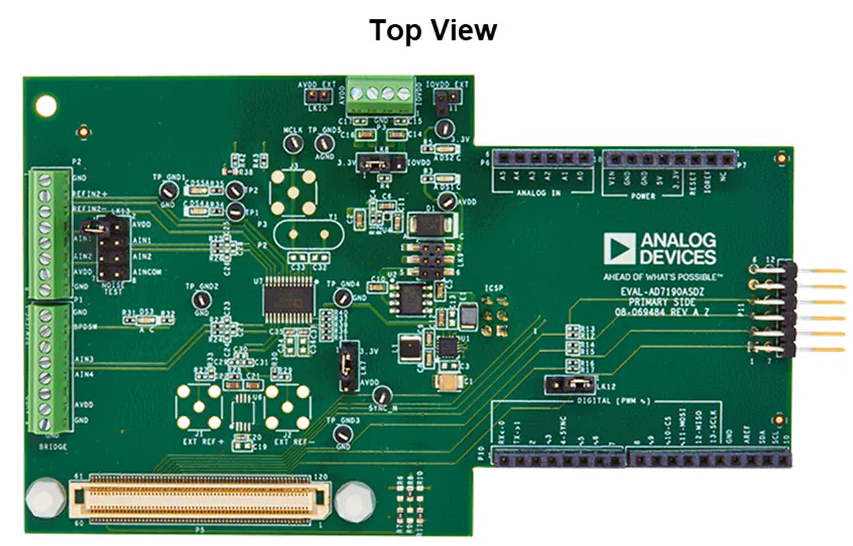
Analog Devices Inc. 適用于EVAL-AD7192ASDZ 的 AD7192評估套件特性/應用/布局
AD4052緊湊型低功耗Easy Drive SAR ADC





 工商網監
工商網監

評論