 175°C高溫環境MEMS陀螺儀——ADXRS645
175°C高溫環境MEMS陀螺儀——ADXRS645
越來越多的應用需要從處于高溫環境中的傳感器收集數據。近年來,半導體、無源器件和互連領域取得了很大進展,使得高精度數據采集和處理成為可能。但是,人們需要能夠在175°C高溫條件下運行的傳感器,尤其是采用微機電系統(MEMS)提供的易于使用的傳感器,這一需求尚未得到滿足。相比同等的分立式傳感器,MEMS通常更小巧,功耗和成本都更低。此外,它們還可以在同樣大小的半導體封裝內集成信號調理電路。
目前已發布高溫MEMS加速度計ADXL206,它可以提供高精度傾角測量。但是,還需要更加靈活和自由,以準確測量系統在嚴苛環境應用下的移動,在這些環境下,最終產品可能遭受沖擊、振動和劇烈移動。這種類型的濫用會導致系統過度磨損和提前出現故障,由此產生高額的維護或停機成本。
為了滿足這一需求,ADI公司開發了一款集成信號調理功能的高溫MEMS陀螺儀,即ADXRS645。此傳感器即使在沖擊和振動環境下也能實現準確的角速率(轉速)測量,且額定工作溫度高達175°C。
MEMS陀螺儀利用科氏加速度來測量角速率。關于科氏效應的解釋,從圖1開始。設想自己站在一個旋轉平臺上,站在靠近中心的位置。您相對于地面的速度以藍色箭頭的長度來顯示。如果您移動到靠近平臺外緣的位置,您相對于地面的速度會加快,具體由更長的藍色箭頭表示。由徑向速度引起的切向速度的增長率,就是科氏加速度。
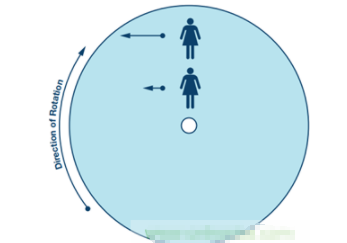
圖1. 科氏加速度示例。人員向北移動到旋轉平臺的外緣時,必須增大向西的速度分量(藍色箭頭),以保持向北移動的路線。所需的加速度就是科氏加速度。
如果Ω表示角速率, r 表示半徑,切向速度即為Ωr。所以,如果在速度為v時,r改變,則會產生切向加速度Ωv。其值是科氏加速度的一半。另一半來自徑向速度方向的改變,總共為2Ωv。如果您施加質量體(M),那么平臺必須施加力—2MΩv—來產生這種加速度,那么質量體也會經受對應的反作用力。ADXRS645通過使用與人在旋轉平臺上向中心和向外緣移動時對應的諧振質量體來利用這種效應。質量體是采用多晶硅,通過微機械加工而成,并粘接在多晶硅框架上,所以它只能沿一個方向諧振。
圖2. 科氏效應演示:響應懸掛在框架內的硅質量體的諧振。綠色箭頭表示結構受到的力(基于諧振質量體的狀態)。
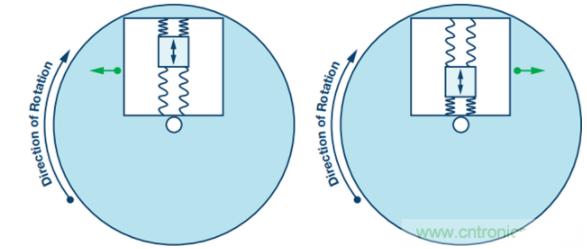
圖2顯示,當諧振質量體向旋轉平臺的外緣移動時,它向右加速,并向左對框架施加一個反作用力。當它向旋轉中心移動時,它向右施加一個力,如綠色箭頭所示。
為了測量科氏加速度,我們使用與諧振運動方向呈90°的彈簧,將包含諧振質量體的框架連接到襯底上,具體如圖3所示。此圖還顯示了科氏檢測指針,它通過電容轉導,在受到施加給質量體的力影響時檢測框架的位移。
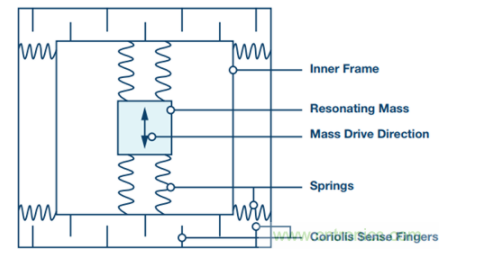
圖3. 該陀螺儀的機械架構原理圖。
圖4顯示完整的結構,從中可以看出,當諧振質量體移動,陀螺儀所在的安裝平面旋轉時,質量體和其框架會受到科氏加速度影響,并因為振動旋轉90°。隨著轉速加快,質量體的位置和從對應的電容獲取的信號發生改變。需要注意的是,陀螺儀可以按任意角度放置在旋轉物體的任意位置,只要它的檢測軸與旋轉軸平行即可。

圖4. 框架和諧振質量體受科氏效應影響,產生橫向位移。
電容檢測
ADXRS645通過附加在諧振器上的電容傳感元件來測量諧振質量體和框架因科氏效應產生的位移,具體如圖4所示。這些元件都是硅棒,與襯底上連接的兩組固定硅棒交錯,形成兩個名義上相等的電容。角速率引起的位移會在系統中產生差分電容。
在實際應用中,科氏加速度是一個極小的信號,會導致幾分之 一埃的射束偏轉,以及仄法級別的電容變化(譯者注:1仄法=1e-21法拉)。因此,最大限度降低對寄生源(例如溫度、封裝應力、外部加速度和電噪聲)的相互干擾是極為重要的。這種作用一部分是通過將電子器件(包括放大器和濾波器)和機械傳感器放置在同一裸片上來實現的。但是,更重要的是在信號鏈中距離盡可能遠的位置實施差分測量,并將信號與諧振器速度關聯起來,尤其是在處理外部加速度產生的影響時。
振動抑制
理想情況下,陀螺儀只對轉速敏感,對其他東西都不敏感。在實際應用中,由于陀螺儀的機械設計不對稱,且/或微加工精度不夠,所有陀螺儀都對加速度有一定的敏感性。事實上,加速度靈敏度有多種表現形式——其嚴重程度因設計而異。最為嚴重的通常要屬對線性加速度的靈敏度(或 g 靈敏度)和振動整流的靈敏度(或 g 2 靈敏度),嚴重到足以完全抵消該器件的額定偏置穩定性。當速率輸入量超過額定測量范圍時,有些陀螺儀軌與軌之間的輸出會存在差異。其他陀螺儀在受到低至幾百 g 的沖擊時,會傾向于鎖死。這些陀螺儀不會受到沖擊損壞,但是也無法再對速率做出響應,需要進行重啟。
ADXRS645采用了一種新穎的角速率檢測方法,使其能夠抑制高達1000 g 的沖擊。它使用四個諧振器對信號實施差分檢測,并抑制與角移動無關的共模外部加速度。圖5頂部和底部的諧振器彼此獨立,并且是反相操作的。所以,它們測量的旋轉幅度相同,但輸出方向相反。因此,利用傳感器信號之間的差值來測量角速率。如此可以消除對兩個傳感器造成影響的非旋轉信號。信號在前置放大器前面的內部硬連線中組合。因此,會在很大程度上防止極端加速過載到達電子器件,從而使得信號調理能在受到大型沖擊時保持角速率輸出。
圖5. 四通道差分傳感器設計。
傳感器安裝
圖6所示為陀螺儀、相關的驅動和檢測電路的簡化原理圖。

圖6. 集成式陀螺儀的框圖。
諧振器電路檢測諧振質量體的速度,進行放大,并驅動諧振器,同時相對于科氏信號路徑保持一個控制良好的相位(或延遲)。科氏電路被用于檢測加速度計框架的移動,利用下游信號處理來提取科氏加速度的幅度,并生成與輸入轉速一致的輸出信號。此外,自檢功能會檢查整個信號鏈(包括傳感器)的完整性。
應用示例
對于電子設備來說,最嚴苛的使用環境莫過于石油和天然氣的井下鉆井行業。這些系統利用大量傳感器來更好地了解鉆柱在地表下的運行狀況,以優化操作并防止造成損壞。鉆機的轉速以RPM為單位測量,是鉆機操作員時刻需要掌握的一個關鍵指標。以前,這個指標由磁力計計算得出。但是,磁力計容易受到鉆機套管和周圍井眼中的鐵質材料影響。它們還必須采用特殊的無磁性鉆環(外殼)。
除了簡單的RPM測量之外,人們越來越熱衷于了解鉆柱動態,以更好地管理施加的力的大小、轉速和轉向等參數。鉆柱動態如果管理不善,可能導致鉆柱高度振動和出現極不穩定的移動,這會導致目標區域的鉆井時間延長、設備過早故障、鉆頭轉向困難,且會對鉆井本身造成損壞。在極端情況下,設備可能斷裂并殘留在鉆井中,之后需要支付極高的成本才能取回。
因鉆柱參數管理不善會導致一種特別有害的移動,即粘滑。粘滑是指鉆頭卡住,但鉆柱頂部繼續旋轉的現象。鉆頭被卡住后,鉆柱底部持續轉動收緊,直到達到足夠扭矩,造成斷裂和松脫,這種斷裂通常非常劇烈。發生這種情況時,鉆頭上會出現按轉速旋轉的大尖峰。粘滑一般周期性發生,可以持續很長一段時間。對粘滑的典型RPM響應如圖7所示。由于地表的鉆柱繼續正常運行,鉆機操作員通常無法意識到,井下正在發生這種非常具有破壞性的現象。

圖7. 粘滑循環RPM剖面圖示例。
在這種應用中,一個關鍵的測量方法是準確、頻繁地測量鉆頭附近的轉速。陀螺儀(例如具有振動抑制效果的ADXRS645)非常適合執行這項任務,因為其測量不受鉆柱的線性移動影響。在出現高度振動和不穩定移動時,磁力儀計算得出的轉速易受噪聲和誤差影響。基于陀螺儀的解決方案能夠即時測量得出轉速,且不使用易受沖擊和振動影響的過零或其他算法。
此外,相比磁通磁力計解決方案,基于陀螺儀的電路體積更小,需要的元器件數量更少,而前者需要多個磁力計軸和額外的驅動電路。ADXRS645中集成了信號調理功能。此器件采用低功耗、低引腳數封裝,支持高溫IC對陀螺儀模擬輸出采樣并將其數字化。采用圖8中所示的簡化信號鏈,可以實現提供數字輸出、額定溫度為175°C的陀螺儀電路。
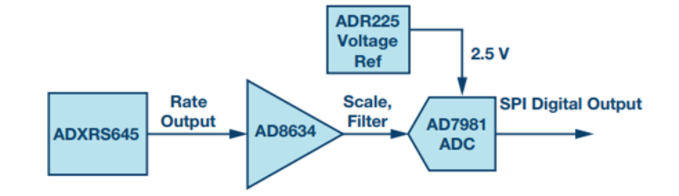
圖8. 額定溫度為175°C的陀螺儀數字輸出信號鏈。
總結
本文介紹了可在175°C高溫環境下使用的MEMS陀螺儀——ADXRS645。此傳感器能在惡劣的環境應用中準確測量角速率,防止沖擊和振動造成影響。此陀螺儀由一系列高溫IC提供支持,以獲取信號并進行處理。
ADXRS645
●創新型陶瓷垂直安裝封裝可針對俯仰率或滾轉率響應來調整方向
●寬溫度范圍:?40°C 至 +175°C
●長使用壽命:在 TA = 175°C 的溫度下保證 1000 小時
●在寬頻率范圍內具有高防振性能
●10,000 g 動力沖擊生存能力
●與基準電壓源成比率
●5 V 單電源供電
●收到數字命令時自檢
●溫度傳感器輸出
編輯:hfy
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753077 -
MEMS加速度計
+關注
關注
4文章
55瀏覽量
17124 -
MEMS陀螺儀
+關注
關注
6文章
51瀏覽量
22640
發布評論請先 登錄
相關推薦
MEMS陀螺儀工作原理及性能提升方法的綜述

基于聚焦叉指換能器的環形SAW陀螺儀制造工藝及測量方案
陀螺儀x軸和y軸的應用
EPSON X2A0002710002 XV7011BB陀螺儀傳感器的特征和用途
一文探秘MEMS陀螺儀工作原理與特性







 工商網監
工商網監
評論