 深度解讀電磁組直立行走車模運動控制任務分解
深度解讀電磁組直立行走車模運動控制任務分解
1 直立行走任務分解
電磁組比賽要求車模在直立的狀態下以兩個輪子著地沿著賽道進行比賽,相比四輪著地狀態,車模控制任務更為復雜。為了能夠方便找到解決問題的辦法,首先將復雜的問題分解成簡單的問題進行討論。
為了分析方便,根據比賽規則,假設維持車模直立、運行的動力都來自于車模的兩個后車輪,后輪轉動由兩個直流電機驅動。因此從控制角度來看,由控制車模兩個電機旋轉方向及速度實現對車模的控制。車模運動控制任務可以分解成以下三個基本任務,如圖2- 1所示:
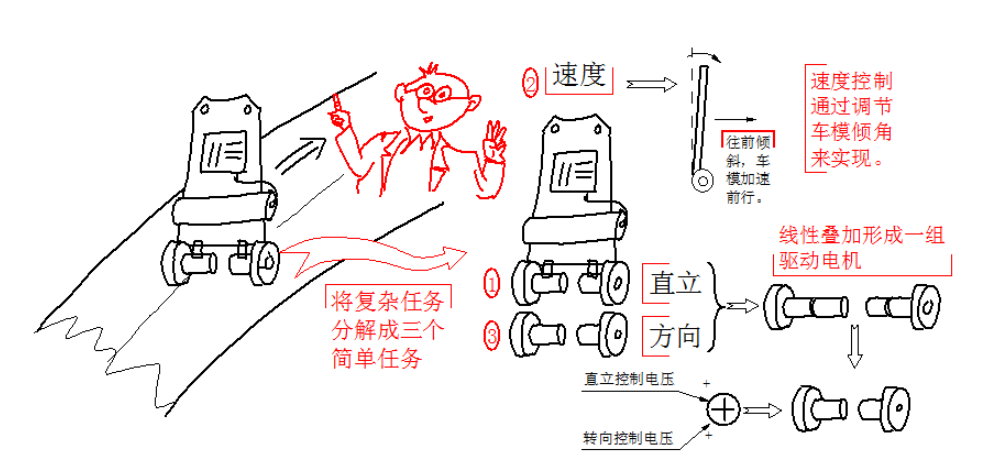
▲ 圖2-1 車模控制任務分解
(1) 控制車模直立:通過控制兩個電機正反向運動保持車模直立狀態;
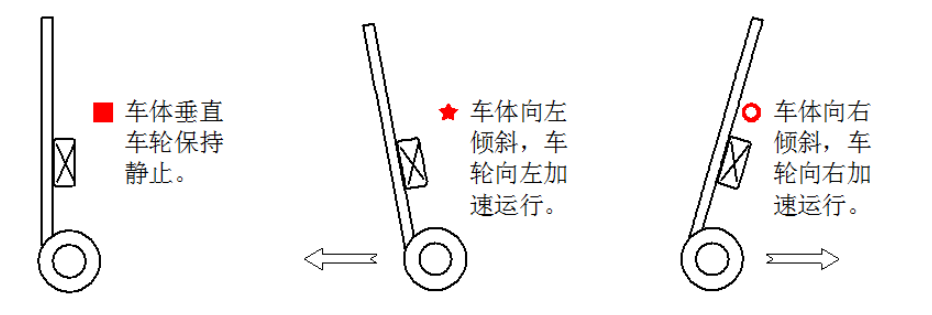
(2) 控制車模速度:通過調節車模的傾角來實現車模速度控制。
(3) 控制車模轉向:通過控制兩個電機之間的轉動差速實現車模轉向控制。
車模直立和方向控制任務都是直接通過控制車模兩個后輪驅動電機完成的。可以假設車模的電機可以虛擬地被拆解成兩個不同功能的驅動電機,它們同軸相連,分別控制車模的直立平衡、左右方向。在實際控制中,是將控制車模直立和方向的控制信號疊加在一起加載電機上,只要電機處于線性狀態就可以同時完成上面兩個任務。
車模的速度是由車模傾角控制完成的。車模不同的傾角會引起車模向前和向后速度變化,從而達到對于速度的控制。
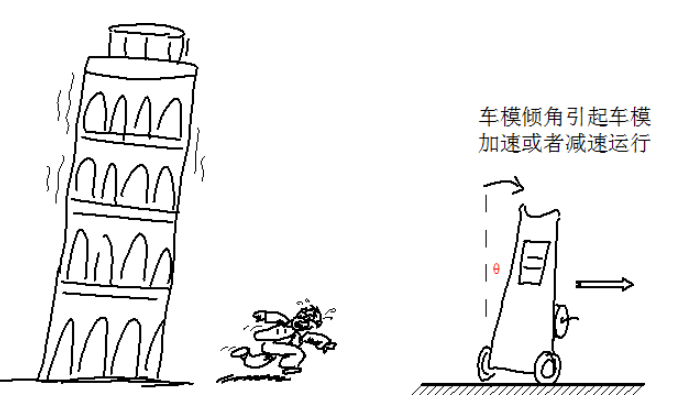
▲ 圖2-2 車模傾角引起車速變化
在上述三個任務中保持車模直立是關鍵。由于車模同時受到三種控制的影響,從車模直立控制的角度,其它兩個控制就成為它的干擾。因此在速度、方向控制的時候,應該盡量平滑,以減少對于直立控制的干擾。三者之間的配合如圖2- 3所示。
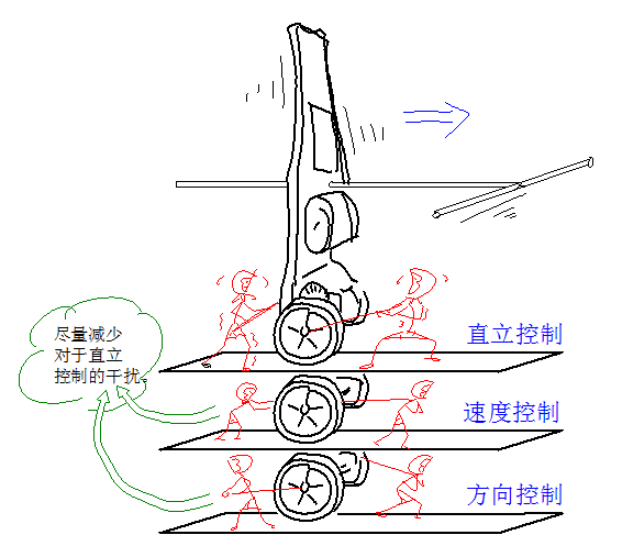
▲ 圖2-3 三層控制之間相互配合
上述三個控制各自獨立進行控制,它們各自假設其它兩個控制都已經達到穩定。比如速度控制時,需要車模已經能夠保持直立控制,通過調節車模傾角的偏移量,改變車模的實際物理傾角。車模前傾和后傾會改變車模的速度。為了避免影響車模直立控制,在進行速度控制時,對于車模傾角的改變一定需要非常的緩慢。這一點將會在后面速度控制中進行詳細討論。
下面分別討論以上三個控制的實現方式。
2 車模直立控制
控制車模直立的直觀經驗來自于雜技表演。一般的人通過簡單練習就可以讓一個直木棒在手指尖上保持直立。這需要兩個條件:一個是托著木棒的手掌可以移動;另一個是眼睛可以觀察到木棒的傾斜角度和傾斜趨勢(角加速度)。通過手掌移動抵消木棒的傾斜角度和趨勢,從而保持木棒的直立。這兩個條件缺一不可,實際上就是控制中的負反饋機制,參見圖2- 4。
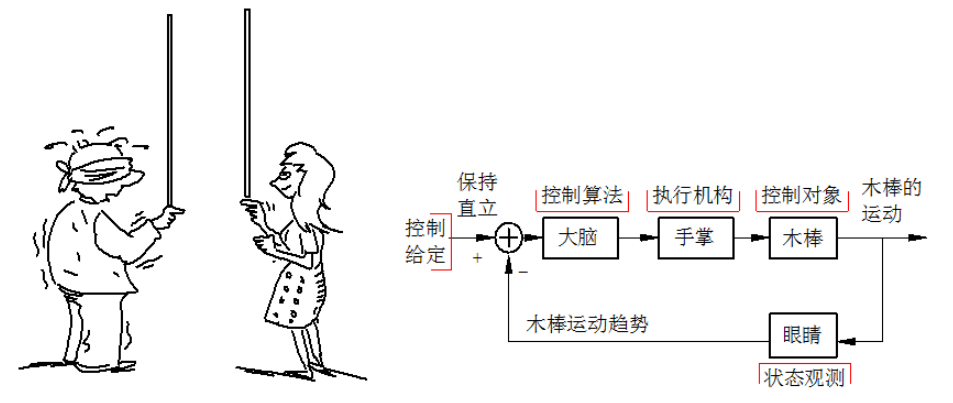
▲ 圖2-4 保持木棒直立的反饋控制
世界上還沒有任何一個天才雜技演員可以蒙著眼睛使得木棒在自己手指上直立,因為沒有了負反饋。
車模直立也是通過負反饋實現的。但相對于上面的木棒直立相對簡單。因為車模有兩個輪子著地,因此車體只會在輪子滾動的方向上發生傾斜。控制輪子轉動,抵消傾斜的趨勢便可以保持車體直立了。如圖2- 5所示。
▲ 圖2-5 通過車輪運動保持車模直立
那么車輪如何運行,才能夠最終保持車體垂直穩定?為了回答這個問題,一般的做法需要建立車模的運動學和動力學數學模型,通過設計最優控制來保證車模的穩定。為了使得同學們能夠比較清楚理解其中的物理過程。下面通過對比單擺模型來說明保持車模穩定的控制規律。
重力場中使用細線懸掛著重物經過簡化便形成理想化的單擺模型。直立著的車模可以看成放置在可以左右移動平臺上的倒立著的單擺。如圖2- 6所示。
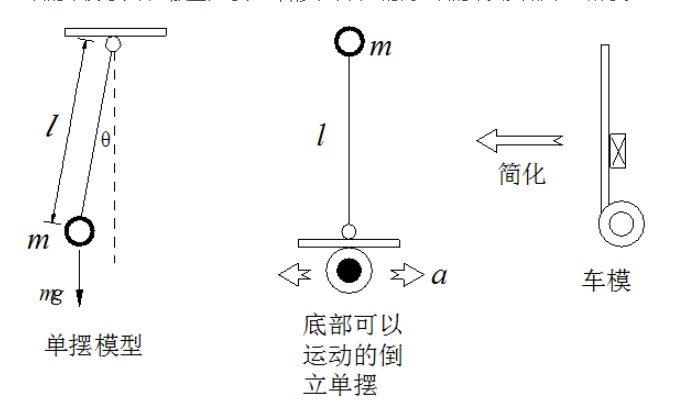
▲ 圖2-6 車模簡化成倒立的單擺
普通的單擺受力分析如圖2- 7所示。
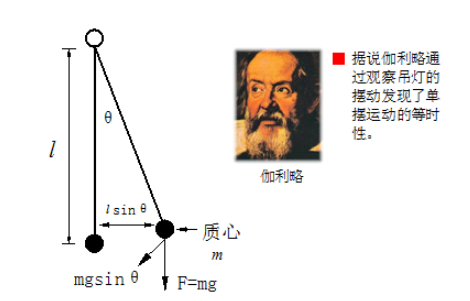
▲ 圖2-7 普通單擺受力分析
當物體離開垂直的平衡位置之后,便會受到重力與懸線的作用合力,驅動重物回復平衡位置。這個力稱之為回復力,其大小為:
F = ? m g ? sin ? θ ≈ ? m g θ F = - mg \cdot \sin \theta \approx - mg\theta

在此回復力作用下,單擺便進行周期運動。在空氣中運動的單擺,由于受到空氣的阻尼力,單擺最終會停止在垂直平衡位置。空氣的阻尼力與單擺運行速度成正比,方向相反。阻尼力越大,單擺越會盡快在垂直位置穩定下來。圖2- 8顯示出不同阻尼系數下,單擺的運動曲線。
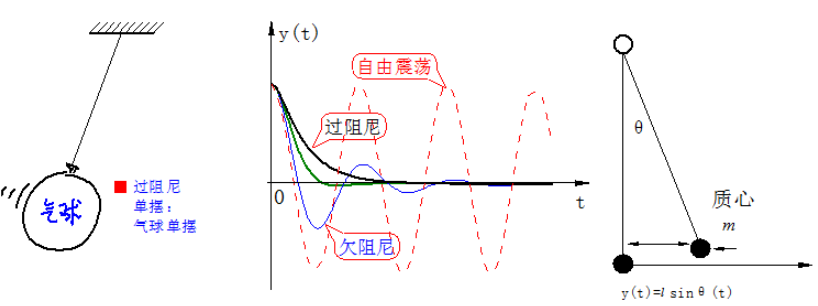
▲ 圖2-8 不同阻尼力下的單擺運動
總結單擺能夠穩定在垂直位置的條件有兩個:
(1) 受到與位移(角度)相反的恢復力;
(2) 受到與運動速度相反的阻尼力。
如果沒有阻尼力,單擺會在垂直位置左右擺動。阻尼力會使得單擺最終停止在垂直位置。阻尼力過小(欠阻尼)會使得單擺產生震蕩,阻尼力過大(過阻尼)會使得單擺到達平衡位置時間拉長。存在一個阻尼臨界阻尼系數,使得單擺最快穩定在平衡位置。
為什么倒立擺在垂直位置時,在受到外部擾動的情況下,無法保持穩定呢?分析倒立擺的受力,如圖2- 9所示。
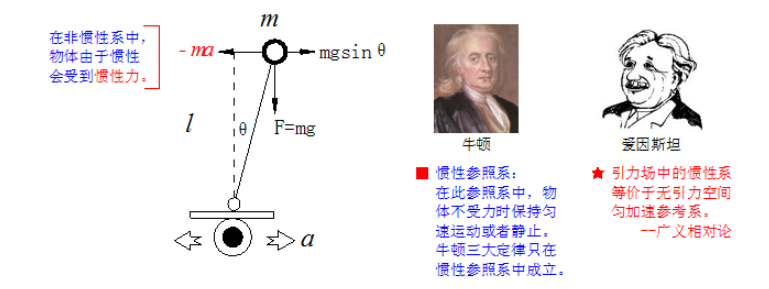
▲ 圖2-9 在車輪上的參照系中的車模受力分析
倒立擺之所以不能象單擺一樣可以穩定在垂直位置,就是因為在它偏離平衡位置的時候,所受到的回復力與位移方向相同,而不是相反!因此,倒立擺便會加速偏離垂直位置,直到倒下。
如何通過控制使得倒立擺能夠像單擺一樣,穩定在垂直位置呢?要達到這一目的,只有兩個辦法:一個是改變重力的方向;另一個是增加額外的受力,使得恢復力與位移方向相反才行。由此,能夠做的顯然只有第二種方式。
控制倒立擺底部車輪,使得它作加速運動。這樣站在小車上(非慣性系)看倒立擺,它就會受到額外的力(慣性力),該力與車輪的加速度方向相反,大小成正比。這樣倒立擺所受到的回復力為

式中,假設控制車輪加速度與偏角θ \thetaθ成正比,比例為k 1 k_1k1?。顯然,如果k 1 > g k_1 > gk1?>g,(g gg是重力加速度)那么回復力的方向便于位移方向相反了。
此外,為了使得倒立擺能夠盡快地在垂直位置穩定下來,還需要增加阻尼力,與偏角的速度成正比,方向相反。因此式(2-1)可變為

按照上面的控制方法,可把倒立擺模型變為單擺模型,能夠穩定在垂直位置。因此,可得控制車輪加速度的控制算法
編輯:hfy
-
電機驅動
+關注
關注
60文章
1216瀏覽量
86730 -
電磁
+關注
關注
15文章
1133瀏覽量
51799
發布評論請先 登錄
相關推薦



20.0-電磁桿的組裝和實物介紹“這個是就是你想要的“-智能車電磁組 電磁循跡小車
什么是網絡運動控制器?運動控制器控制伺服電機的方式有哪些?
運動控制器的代碼運行順序是什么
運動控制和過程控制的區別和聯系
plc可以進行運動控制嗎







 工商網監
工商網監
評論