 基于L298N的直流電動機驅動芯片設計
基于L298N的直流電動機驅動芯片設計
首先,最常用的是H橋驅動器芯片:L928N
該芯片簡單,便宜且易于購買。它將兩個H橋電路集成到一個芯片中,具有PWM控制和電流采集功能。但是它有兩個嚴重的缺點:
1)H橋電路的損耗太大。
2)手冊要求電機驅動電壓必須比控制邏輯電壓高2.5V。不適合單動力汽車。
三極管H橋
具有8550 + 8050的低功率電橋:以5V驅動時,驅動約100mA的小型電動機,電橋兩端的電壓降小于0.5V。
D772 + D882的電橋具有更大的電流:在7.2V時,在200-300mA時電壓降小于1V。
MOS管橋
MOS管的效率是高的。但是有兩個問題:
1)MOS管比較脆弱,因此使用時需要特別注意。例如,接通電源時,應仔細研究時序,否則將很容易導致電橋通過并燒毀MOS管;
2)大功率MOS?晶體管的柵極需要較高的驅動電壓?,否則無法正常導通。因此,當使用電池驅動時,有必要增加一個升壓電路。
L298N直流電動機驅動芯片
L298是SGS的產品。最常見的是采用15引腳Multiwatt 封裝的L298N 。內部還包含一個4通道邏輯驅動器電路。驅動兩臺直流電動機或一臺兩相步進電動機非常方便。
L298N接受標準的TTL邏輯電平信號VSS,該信號可以連接到4.5至7V。4引腳VS連接至電源電壓,并且VS電壓范圍VIH為+2.5至46V。輸出電流有效電流為2.5 A,可驅動感性負載。1 針和15 針管的發射極分別引出,以訪問電流采樣電阻器以形成電流檢測信號?。L298可以驅動2臺電動機,OUT1,OUT2和OUT3,OUT4可以分別連接到電動機。我們選擇在該實驗裝置中驅動一臺電動機。5、7、10、12引腳連接到輸入控制電平,以控制電動機的正向和反向旋轉。ENA ,ENB連接到控制啟用器以控制電動機的堵轉。表1是L298N功能邏輯圖。
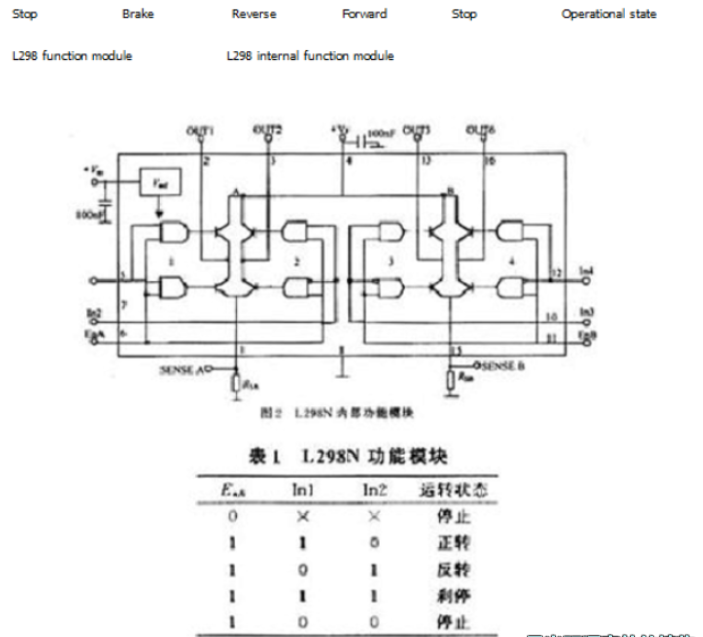
In3,In4的邏輯圖與表1相同。從表1可以看出,當EnA 為低電平時,輸入電平作用于電動機控制。當EnA 為高電平時,輸入電平為高電平和低電平,并且電動機為正或負。相同的低級電動機停止,相同的電動機制動。L298?控制器的原理如下?:
圖3是控制器的示意圖,由三個虛線框圖組成。
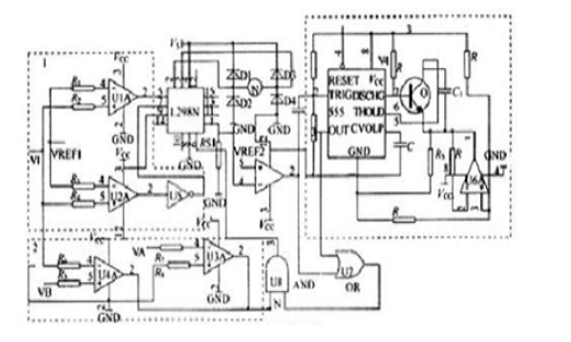
以下是三個虛線框圖功能:
(1)虛線框圖1控制電動機反向,U1A,U2A是比較器,VI是來自爐壓力傳感器的電壓。VI》 VRBF1時,U1A輸出高電平,U2A通過變頻器輸出高電平至低電平,電機正轉。當VI《=“” span=“”》
(2)在虛線2的框圖中,兩個比較器U3A和U4A形成雙極限比較器。當VB《vi《va, the=“” output=“” is=“” low.=“” when=“” vi=“”》 《vb, the=“” output=“” is=“” high.=“” va,=“” vb=“” upper=“” and=“” lower=“” limits=“” of=“” 《=“” span=“”》爐壓力傳感器轉換的電壓,即反應堆主體的壓力控制范圍。根據過程要求,我們可以指定值只要爐子的壓力在VA和VB之間,就可以達到VA和VB的水平。電機停止(注意VB《vrbf1《va, if=“” it=“” is=“” not=“” within=“” this=“” range,=“” 《=“” span=“”》系統不穩定)。
(3)虛線框圖3是長延遲電路。U5A是比較器,Rs1是采樣電阻,VRBF2是電動機過電流電壓。Rs1上的電壓大于VREF2,電機過流,并且U5A輸出為低電平。從上面可以看出,方框1控制電動機的正向和反向旋轉,方框2控制爐體的脈動幅度。當爐體壓力過小或過大時,根據直流電動機的穩態運行方程[3],將電動機兩端旋轉到固定位置以停止運轉
:U = CeФN+ RaIa
其中:Ф是電動機每極的磁通量;
Ce 是電動勢常數。
編輯:hfy
-
直流電動機
+關注
關注
7文章
196瀏覽量
22866 -
驅動芯片
+關注
關注
13文章
1286瀏覽量
54691 -
L298N
+關注
關注
21文章
224瀏覽量
78705
發布評論請先 登錄
相關推薦
直流電動機的調速
帶光電編碼器式直流電動機模型及控制
如何使用Arduino控制直流電動機
直流電動機的結構
Arduino直流電動機控制教程






 工商網監
工商網監
評論