 PLC如何操控步進電機
PLC如何操控步進電機
plc作為一種工業操控核算機,具有模塊化構造、裝備活絡、高速的處理速度、準確的數據處理才調、PLC對步進電機也具有超卓的操控才調,運用其高速脈沖輸出功用或運動操控功用,即可結束對步進電機的操控。
關于那些在作業進程中移動間隔和速度均斷定的詳細設備,電工論壇小編以為選用PLC經過步進電機驅動器來操控步進電機的作業是一種志趣的技能計劃。
步進電機的特征:(1)步進電機的角位移與輸入脈沖數嚴峻成正比,電機作業一星期后沒有累積過錯,具有超卓的跟從性。(2)由步進電機與驅動器電路構成的開環數字操控體系,既十分簡略、便宜,又十分牢靠。一同,它也能夠與視點反響環節構成高功用的閉環數字操控體系。(3)步進電機的動態照料快,易于啟停、正回轉及變速。(4)速度可在恰當寬的計劃內滑潤調度,低速下仍能確保取得大轉矩。(5)步進電機只能經過脈沖電源供電才調作業,它不能直接運用溝通電源和直流電源。
步進電機能照料而不失步的最高步進頻率稱為“主張頻率”;與此相似,“接連頻率”是指體系操控信號俄然關斷,步進電機不沖過方針方位的最高步進頻率。而電機的主張頻率、接連頻率和輸出轉矩都要和負載的翻滾慣量相習氣。有了這些數據,就能有用地對步進電機進行變速操控。
選用PLC操控步進電機,應依據下式核算體系的脈沖當量、脈沖頻率上限和最大脈沖數量,進而挑選PLC及其相應的功用模塊。依據脈沖頻率能夠斷定PLC高速脈沖輸出時需求的頻率,依據脈沖數量能夠斷定PLC的位寬。脈沖當量=(步進電機步距角×螺距)/(360×傳動速比);脈沖頻率上限=(移動速度×步進電機細分數)/脈沖當量;最大脈沖數量=(移動間隔×步進電機細分數)/脈沖當量。
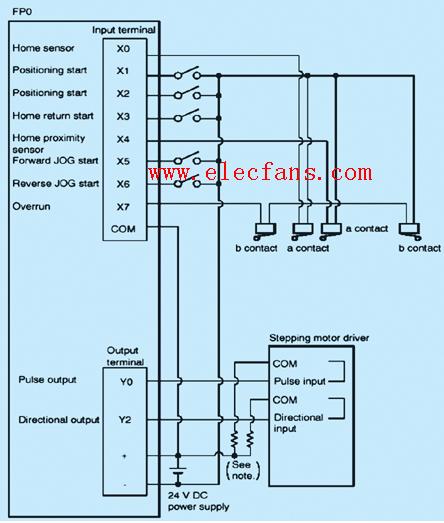
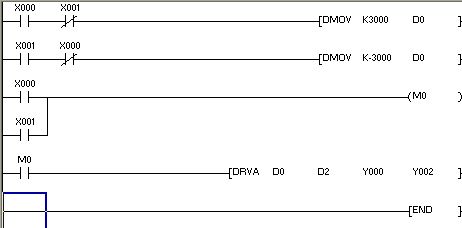
PLC對步進電機的操控首要要樹立坐標系,能夠設為相對坐標系,也能夠設為必定坐標系。坐標系的設置在DM6629字中,00—03位對應脈沖輸出0,04—07位對應脈沖輸出1。設置為0時,為相對坐標系;設置為1時,為必定坐標系。
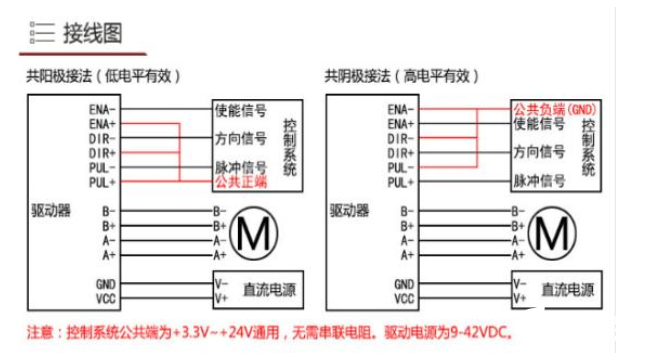
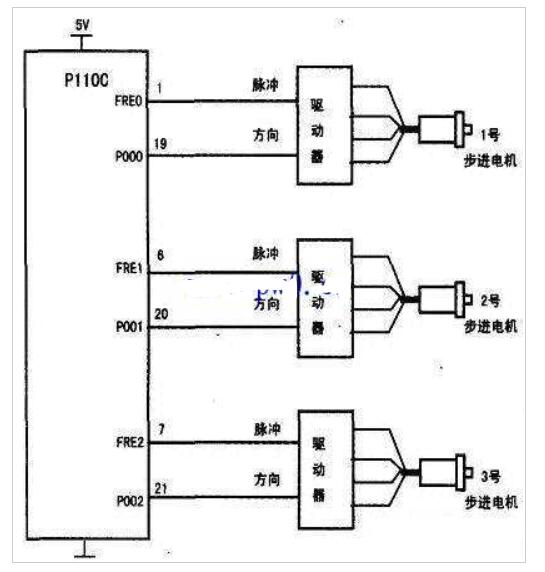
選用PLC經過步進驅動器來操控步進電機的作業,然后到達了PLC在步進電動操控中運用愈加廣泛。例如,在對單雙軸運動的操控進程中,在操控面板上設定移動間隔、速度和方向等參數。PLC讀入這些設定值后,經過運算發作脈沖、方向信號,操控步進電動機驅動,到達對間隔、速度、方向操控的意圖。并經過實測證實體系作業作用具有牢靠性、可行性、有用性。
-
plc
+關注
關注
5010文章
13271瀏覽量
463057 -
步進電機
+關注
關注
150文章
3109瀏覽量
147443
發布評論請先 登錄
相關推薦
用PLC實現步進電機的直接控制
采用PLC實現對步進電機的控制(二)

PLC控制步進電機邏輯思路

plc如何控制步進電機的速度和方向?






 工商網監
工商網監
評論