


前言
無人機的調試工作很大一部分是對飛行控制參數的調試,廣義的飛控參數包含了制導、導航、控制律以及各種控制策略中的可調參數。
一般的飛控都有上百項需要人為調試的參數,有的甚至是幾百上千個。而姿態控制作為無人機控制的基礎,一般在無人機試飛調試時首當其沖,成為我們首要調試對象,當然導航的參數以及我們上一講PX4實戰目光之振動分析肯定是在調試姿態之前都有一個比較好的狀態的。
我們今天要說的姿態參數調試方法是針對目前使用最為廣泛的串級PID控制器進行的,而在姿態控制中基于時標分離假設設計的控制器一般分為內外環結構,內環控制姿態角速率,外環控制姿態角。
時標分離的意思就是內環響應的速度要遠快于外環,所以內環響應可以在很短的時間內跟上外環給出的期望。
PX4中使用的P(外環)—PID(內環)型結構就是這么設計出來的,關于姿態控制的控制律設計部分我們以后再講,會針對歐拉角和四元數兩種描述分別進行論述。
今天我們就來談談這個P—PID的內外環姿態控制器的參數應該怎么調試。
固定翼、直升機和多旋翼的調參方法有類似之處,但是他們三者對于參數的敏感性完全不同,直升機對參數及其敏感,參數稍有變化控制效果就會相差很多,而固定翼對于參數適應范圍很廣,也是最好調試的。
今天我們的調參主要針對的是多旋翼飛機(垂起飛行器旋翼部分),以PX4為例,其他飛控調試方法基本一樣,可能參數名字不一樣,功能有所差別而已。
調參準備
在開始參數調試之前,我們要做一些調試準備,飛行器各系統正常自不必說,飛控參數也要有所更改和驗證:
1、電調校準完畢;
2、PWM_MIN參數要保證飛行器解鎖后電機不會停止轉動,這么做的原因是在空中遇到姿態控制比較極端的情況下,飛行器輸出的電機控制信號一般會打到最低和最高位置。如果,最低位置PWM_MIN時電機已經停止轉動,那也就是說電機這部分控制已經不起效果了,會造成飛行器力和力矩的不平衡,姿態控制出現問題。
所以在地面時要進行以下驗證:
A、不裝槳葉上電;
B、將油門打到最低位置;
C、俯仰滾轉偏航三個方向都晃動45度(這個角度根據你設置的最大姿態角來定);
D、檢測有無電機停轉;
3、還是打開SDLOG_PROFILE參數的high rate選項,便于分析姿態控制效果;
4、將參數MC_AIRMODE置0.此參數會在電機飽和時優先保證姿態控制,減弱油門通道的控制;
5、將姿態相關的所有參數都減少20%,避免發散的可能性。其主要參數如下:
滾轉角速率控制器:(MC_ROLLRATE_P, MC_ROLLRATE_I, MC_ROLLRATE_D)
滾轉角速率控制器:(MC_PITCHRATE_P, MC_PITCHRATE_I, MC_PITCHRATE_D)
滾轉角速率控制器:(MC_YAWRATE_P, MC_YAWRATE_I, MC_YAWRATE_D)
滾轉角控制 (MC_ROLL_P)
俯仰角控制 (MC_PITCH_P
偏航角控制 (MC_YAW_P)
最大滾轉角速率 (MC_ROLLRATE_MAX)
最大俯仰角速率(MC_PITCHRATE_MAX
最大偏航角速率 (MC_YAWRATE_MAX)
滾轉角速率前饋控制(MC_ROLLRATE_FF)
俯仰角速率前饋控制(MC_PITCHRATE_FF)
偏航角速率前饋控制(MC_YAWRATE_FF)
參數調試方法
俯仰滾轉偏航三個通道的調試方法基本是一樣的,所以我們只針對其中一個通道來進行說明,就以滾轉通道為例,為了飛行安全,我們調試時都以manual/Stablized模式起飛,不進行Acro模式的試飛。
調試步驟一般是這樣的:
1、輕推油門,在地面上觀察飛機有無震蕩趨勢,沒有則正常起飛;
2、在空中做滾轉方向激勵(遙控器滾轉遙桿迅速向左或向右撥桿后回中),遙控器從小到大給出滾轉通道激勵(10-30度左右的激勵)后觀察飛機反饋,看飛機有無震蕩現象;
3、先調試參數MC_ROLLRATE_P,此參數是角速率控制器的主力軍,只要有誤差第一時間響應,參數大小直接影響飛機的靈敏度,每次增加10-20%直到給激勵后飛機出現小幅震蕩為止,這時候將此參數縮減為60-70%左右;
4、再調試參數MC_ROLLRATE_I,也是每次增加10-20%直到飛機出現小幅震蕩,縮減為60-70%,此參數主要用于消除跟蹤靜差,參數太小會導致無法應對外界擾動;
5、參數MC_ROLLRATE_D與飛行器的噪聲有關,所以對于噪聲大的飛行器此參數基本設置為0附近,噪聲小的可以適當增加此參數后觀察飛機是否有小幅震蕩,有的話縮減為50%,此參數過小會出現飛行器給出激勵后回中時超調出現多次余震。
6、固定好內環參數后調試參數MC_ROLL_P,此參數基本不用怎么調試,調大了也會震蕩,然后縮小;
7、MC_ROLLRATE_FF參數其實就是角速環輸出直接反饋到電機上,此參數有利于飛行器給出姿態期望后的快速響應,但是不能過大,因為他不是反饋控制,要是占的輸出比例過大,會干擾角速率環的控制。如果飛行器姿態響應比較慢可適當加大,姿態響應過于靈敏則降低此參數。
8、關于角度和角速率的限幅參數其實要根據具體的飛機來定了,如果飛機的電機不夠富裕,那就限制得小一點,如果電機能力足夠,就放寬一些。
9、THR_MDL_FAC參數,這個參數是用來修正升力和PWM輸出值的關系的,我們經常發現在懸停狀態時飛機的姿態控制好好的,但是到了快速爬升和下降時,飛機就出現姿態不穩的現象,就是因為力和PWM的輸出他不是線性關系,所以會出現不同油門值的時候控制效果不一樣,這個參數就是用來調試這個現象的。關于這個參數我們后面再講。
數據分析
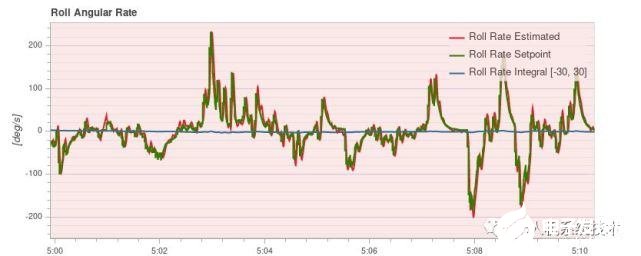
調參是一定需要數據分析的,可以使用Flight Review來進行分析,主要分析角度和角速率跟蹤情況以及電機是否出現飽和現象。
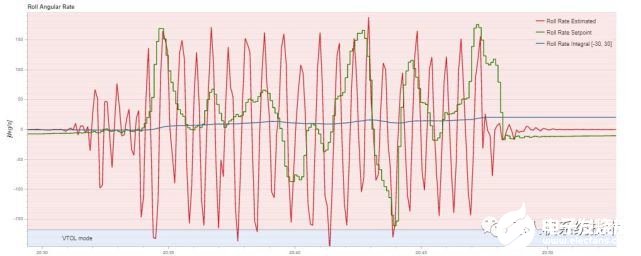
下面的數據除了第一張圖之外都是較大尺寸飛機的姿態響應曲線,所以給出激勵后響應較慢,不像小尺寸飛機的跟蹤效果那么好。
角速率跟蹤好的情況就跟下圖所示:
跟蹤不好震蕩的情況是這樣的:
姿態跟蹤好的情況給激勵是這樣的:

姿態跟蹤不好的情況是這樣的:

總結
本文描述了如何調試角度控制器的主要參數,調參的時候要注意不要一步調太多,調試參數時飛機要落地,多調試,多總結,基本上就能夠掌握調試的技巧了。姿態調參部分還有TPA的相關參數和THR_MDL_FAC沒有細講,后面會進行補充。
責任編輯:gt
-
控制器
+關注
關注
114文章
17042瀏覽量
183463 -
無人機
+關注
關注
230文章
10791瀏覽量
186054
發布評論請先 登錄
PWM控制器的主要參數
【AWorks280試用申請】無人機控制
都在談論無人機:教你10種利用無人機賺錢的方法
無人機主從式姿態同步控制器設計與仿真
無人機流行和快速增長背后,對無人機開發平臺了解多少?
無人機飛行控制器電路該怎么設計?
各類反無人機技術的優勢
無人機反制設備的原理是什么?

nixie微型無人機的功能介紹_nixie微型無人機多少錢






 工商網監
工商網監

評論