 基于Intel XScale PXA255處理器的汽車黑匣子系統設計
基于Intel XScale PXA255處理器的汽車黑匣子系統設計
引言
2020年中國民用汽車數量將飆升至1.4億輛,全世界汽車保有量以每年3000萬輛的速度增長,由此帶來的交通安全事故數量也逐年增長。在處理交通事故時,執法人員無法了解整個事故發生前后狀況,供提取證據的事故現場一般被嚴重破壞,可能會導致一些誤判。而汽車一旦裝上本系統后,在處理交通事故的程序上,由于有錄像和數字證據,提高了執法的公平性和公證性。
本系統設計的汽車黑匣子實現了視頻取證,通過攝像頭采集事故發生前后車前的錄像,可以真實地再現事故發生的全過程。此外,汽車黑匣子還具有防盜功能,可以在一定的條件下啟動語音傳輸功能,通過移動電話網絡把車內的語音傳輸到指定的接收中心,也可以通過GPS全球定位系統確定汽車的位置。
基于Sitsang開發平臺的開發環境
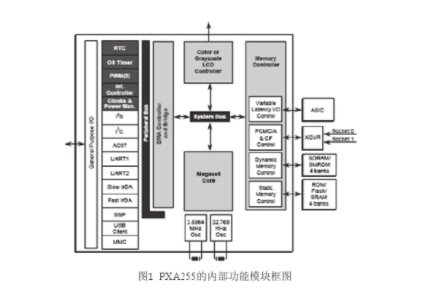
Sitsang開發平臺是一套完整的基于Intel XScale PXA255處理器的嵌入式開發平臺。Intel XScale PXA255處理器設計為高性能,低功耗和高度集成應用,例如:PDA,交換機,智能手機等。該平臺提供了諸多的接口供開發使用:
* 640×480分辨率的真彩液晶屏;
* 一個USB從口,兩個USB主口;
* 麥克風,線性輸入,耳機接口;
* I2C總線接口;
* 一個CF卡接口;
* 一個SD/MMC卡插槽;
* 全功能藍牙串口和標準串口。
該平臺支持WinCE或Linux的操作系統,軟件配置包含了WinCE的BSP(板級支持包),Linux操作系統的內核源代碼和所有的硬件驅動程序。
我們采用了Linux操作系統,內核版本是Linux2.4.19,對內核增加了XScale PXA255的補丁和Sitsang開發平臺外圍擴展接口的驅動,例如USB主控芯片是Philips的ISP1161驅動。采用了QT/Embedded編寫圖形界面,QT/Embedded是一個C++的GUI開發工具包,提供了許多標準的QT API,讓我們可以基于這些API很方便快捷地開發出圖形界面。
系統的組成
該系統以Sitsang板為中心,擴展了三個攝像頭、一個無線通信模塊、一個GPS模塊、麥克風和緊急開關。
取證攝像頭負責視頻取證,監控攝像頭負責監視車內狀況,倒車攝像頭輔助車主觀察車后視覺死角,GPS模塊接收經緯度數據,無線通信模塊傳輸圖像和GPS數據,緊急開關在緊急情況下使用,麥克風用來留言。本系統充分發揮了XScale PXA255芯片的強大功能,實現了MPEG-4的編解碼和各個模塊間的數據通信等多項軟件功能,使Sitsang起到中心控制和協調作用。
系統的主要外圍設備如下:
* 無線寬帶網絡:我們選擇了新一代的無線寬帶網絡來傳輸數據。
* G P S模塊:選用了RS232接口的GPS模塊,相對而言,由于Sitsang板已經有了串口的驅動,并且串口編程較為簡單,速率也滿足需求,所以適合本系統。
* 攝像頭:USB接口的攝像頭是最普遍常見的。USB總線最長傳輸距離可達5米,電磁干擾影響極小,安裝方便,支持即插即用,滿足我們系統的需求。在Linux-2.4.19的內核中支持了大多數市場上已有的攝像頭的USB控制器,如最常見OmniVision公司的OV511,Philips等等。并且針對Sitsang板打好補丁的Linux內核也已經包含了Philips公司的ISP1161 USB主控制芯片的驅動。
系統主要功能
視頻取證功能
車輛自啟動時,便啟動車前的攝像頭采集數據,并在緩沖區內刷新保存最新的30s的視頻數據。保存視頻的形式分為手動保存和自動保存兩種。
手動保存,主要用于小的交通摩擦,車輛的 行駛速度沒有發生較大變化時,此時,車主可以根據自身需要,手動選擇保存,黑匣子還會延續保存一段時間;自動保存,主要用于當車輛發生大的交通事故時,汽車翻轉或車體發生較大形變,觸發開關,系統會自動啟動視頻取證功能,保存最新的數據,并延續保存一段數據。由于Sitsang板上的資源有限,同時又要使資源利用最大化,本系統設計成最多可保存7段視頻證據,每段約2.5MB,共占用系統的存儲空間的17.5MB。
汽車防盜功能
允許車主通過短信的方式接收車輛當前的經緯度。一旦車主發現車輛被盜時,通過發短信的方式遠程控制車內黑匣子,啟動撥叫功能,用以監聽車內狀況;然后,繼續通過發送短信的方式將車主身邊計算機的IP地址發送給“黑匣子”,啟動“黑匣子”上網功能,主動與所接收的IP地址的計算機綁定,并且建立TCP/IP通道。“黑匣子”同時自動將切換到車內的攝像頭,開始傳遞GPS數據和攝像頭采集的圖像到遠程的計算機,遠程的服務器就會將接收到的數據自動定位到電子地圖,可以查看到車輛的具體位置、方向、車輛運行速度,并且,通過服務器的圖像接收程序,可以清楚的看到盜賊的外貌。
無線追蹤功能
此系統在駕駛座附近及后座設置三個隱藏的緊急開關。觸發緊急按鈕,黑匣子會自動先向預設的電話號碼打電話,隨后可以通過接收短信的方式繼續把GPS數據和車內的圖像通過無線網絡傳給預設的靜態IP,為事后的抓獲犯罪人提供了大量確切證據和有效信息。
輔助倒車
由于后視鏡視角有限,無法看到車后所有的景象,尤其是緊靠車尾部的景象,針對上述情況,我們在車尾部安裝一個攝像頭,用來輔助駕駛員倒車。攝像頭將被安裝在車尾的正后方,恰好拍攝駕駛員通過后視鏡看不到的地方。而且攝像頭的傾角偏下,可以很好地查看地面是否有突起的障礙物。用攝像頭輔助駕駛員,既能使駕駛員放心,又減少了倒車事故。
語音留言
語音留言功能具有留言、停止、回放、刪除等選項,同時可以顯示系統當前是否有留言。留言時,可以手動停止,也可以限時自動停止。限時留言的上限設為30秒。留言功能的實現讓汽車更加人性化。
車主身份認證
此項功能具有一定的防盜作用。系統開啟后,會提示車主輸入密碼。只有在輸入正確的密碼后,車主才能啟動保存視頻證據、攝像頭輔助倒車、留言等功能。是否輸入密碼并不影響車輛的啟動,但是如果開車的人在一段時間內,仍然沒有輸入正確的密碼,系統會自動發送短信到車主預設的手機號碼,進行短信提醒、報警。
硬件電路框圖
由于Sitsang板已經集成了所需的大部分接口,所以外圍的系統的硬件電路主要是一些額外的接口電路。
U S B主控接口切換器
系統采用了三個攝像頭,而Sitsang板上只有兩個USB主控接口,并且還要有一個要用來連接GPS設備。而且根據系統的要求,三個攝像頭不是同時工作,于是我們就自己設計了一套USB切換器。電路主要由Maxim公司的MAX4662模擬開關組成。電路的原理框圖如圖 1所示。
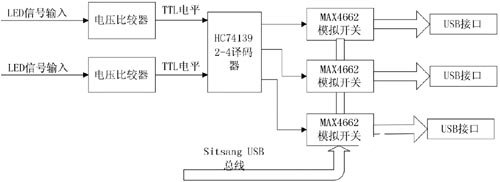
圖 1 USB切換器原理框圖
USB 串口轉換器
Sitsang板上有兩個RS232串口,其中一個用來連接無線通信模塊,另外一個用于調試。但是我們還需要一個RS232串口來與GPS模塊相連,所以制作了一個USB轉RS232的轉換器。
可供選擇的USB轉RS232的芯片較多,而且Linux的內核中也支持了大多數的芯片。我們選擇了國內較為常見的FTDI公司的FTDI232BM芯片,該芯片兼容USB1.1/2.0,內建128B 的發送緩存和 384B的接收緩存,性能滿足我們的需求。
FTDI232BM芯片把從USB得到的信號轉換成標準的TTL電平,再經過一片MAX232的電平轉換芯片,把TTL電平轉換成RS232的電平。電路的原理框圖如圖 2所示。
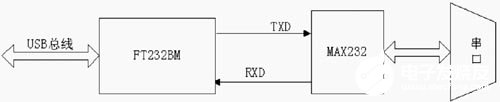
圖2 USB to 232轉換器原理框圖
軟件設計
本系統應用軟件基于QT/Embedded編寫,具有良好的用戶界面。軟件主要分攝像頭模塊、無線通信模塊和GPS模塊等。其中無線傳輸的軟件模塊由客戶端和服務器端兩部分組成。客戶端程序以Linux操作系統為軟件平臺,使用arm-liunx-g++開發工具設計;服務器端程序以Windows XP操作系統為軟件平臺、使用VC++6.0。整體軟件程序框架如圖3所示。
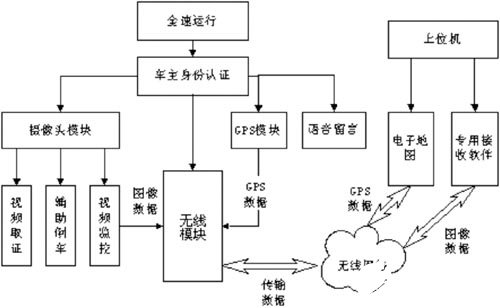
圖 3 整體軟件程序框架圖
視頻采集軟件設計的關鍵是如何從USB攝像頭讀取圖像數據。從攝像頭讀圖像數據程序的編寫主要是調用Video4Linux的API函數。Video4Linux(簡稱V4L),是Linux中關于視頻設備的內核驅動API。在Linux中,視頻設備是設備文件,可以像訪問普通文件一樣對其進行讀寫。其中,攝像頭的設備文件是/dev/video0。
Video4Linux下視頻編程的流程:
1. 打開視頻設備;
2. 讀取設備信息;
3. 更改設備當前設置;
4. 進行視頻采集,兩種方法: 內存映射,直接從設備讀取;
5. 對采集的視頻進行處理;
6. 關閉視頻設備。
由于視頻數據量較大,而Sitsang板的可供使用的存儲容量空間較小,所以我們得把視頻數據壓縮以滿足系統要求。
我們采用PC機上的MPEG4的編解碼軟件,Mplayer是Linux下播放速度最快,支持媒體格式最多的播放器。這款軟件因為采用的是libavcodec算法,進行過特殊的優化,所以運行速度較快,移植到ARM平臺也具有較快的速度。經過努力,終于用arm-linux-gcc交叉編譯成功,移植到Sitsang平臺。
結語
整套系統總體實現了新一代汽車黑匣子的各項功能。當然,系統仍然需要進一步完善,比如:無線網絡傳輸速度差強人意,不過隨著3G時代的到來,2MB的帶寬將會很好解決這一問題,汽車黑匣子系統的前景將更為廣闊。
責任編輯:gt
-
處理器
+關注
關注
68文章
19348瀏覽量
230260 -
汽車電子
+關注
關注
3027文章
7983瀏覽量
167261 -
攝像頭
+關注
關注
60文章
4851瀏覽量
95904
發布評論請先 登錄
相關推薦
如何在Intel XScale PXA255上構建嵌入式Linux應用平臺
人體黑匣子系統HRS-I是什么?
如何利用PXA255處理器的Sitsang開發平臺實現紅外模塊的設計?
Intel Xscale PXA255 USB主控制器的實現
應用處理器PXA255上的嵌入式Linux系統開發
基于PXA255的GPRS圖像傳輸系統設計
基于PXA255的嵌入式智能減振系統設計
Intel Xscale PXA255嵌入式處理器與CF卡的

PXA255處理器與CF卡的接口設計
基于XSCALE架構處理器WinCE系統BSP開發

探究PXA255的VoIP語音傳輸系統





 工商網監
工商網監
評論