 一種全新的自平衡全向獨輪車(OmBURo)
一種全新的自平衡全向獨輪車(OmBURo)
作者是UCLA RoMeLa實驗室在讀博士生—沈駿杰,目前研究方向涉及機器人規劃和控制。本文將分享他們在ICRA'20上的最新的工作:一種全新的自平衡全向獨輪車(OmBURo),它采用一種全新的主動式全向輪機構AOW。這種全向輪的設計能夠使得單一輪式機構同時具有縱向和橫向的主動式移動能力,因此OmBURo能夠做到在平面僅靠獨輪保持平衡,進而在任意時刻能夠向任意方向移動。
一、引 言
我們認為應用在空間狹小、人群密集環境中的機器人移動裝置,需要做到以下幾點:首先它的空間占有量需要小;其次它需要能做到全方向移動;最后它需要移動靈活,能夠快速避障。
基于此,我們研發了OmBURo (Omnidirectional Balancing Unicycle Robot) ,一種全新的自平衡全向獨輪車。目前已知的類似于OmBURo的機器人移動裝置包括Segway兩輪自平衡車,但它無法做到直接的橫向移動(若需右行先得自轉);老式的獨輪車(使用類似反作用輪機構保持橫向平衡)也無法做到全方向移動;Ballbot(以球代輪)和本田公司研發的U3-X可以做到以上三點,但我們認為摩擦傳動會限制它們的使用環境和壽命。
二、OmBURo樣機簡介
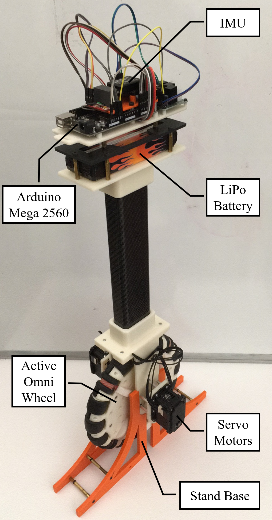
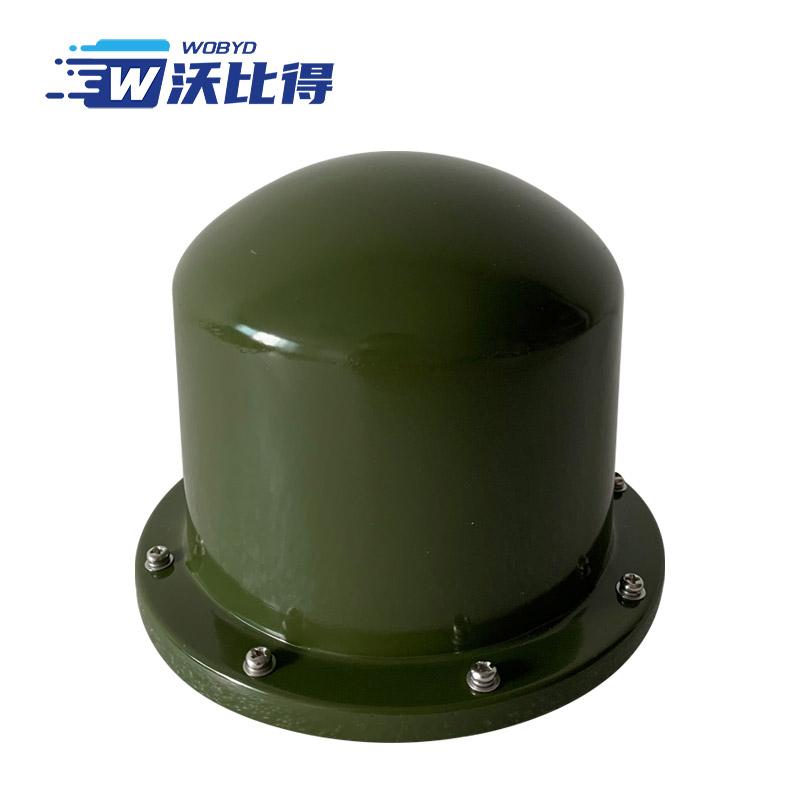
OmBURo樣機主要部件有實驗室研發的主動式全向輪AOW (Active Omnidirectional Wheel),兩個Dynamixel MX-64伺服電機(配有編碼器),慣性測量單元(IMU),Arduino控制器以及鋰電池。
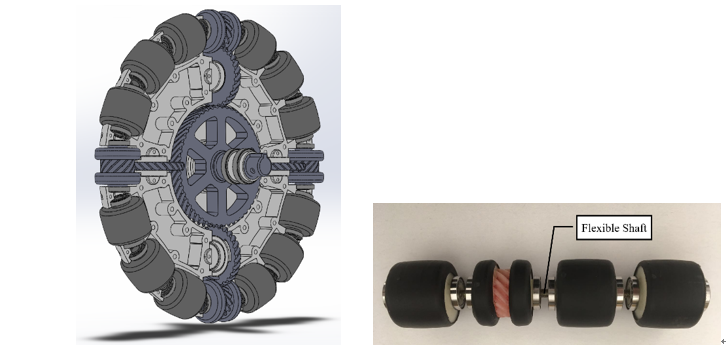
區別于普通全向輪完全不受控制的從動輪,AOW使用斜齒輪組機構驅動其中部分,剩余由軟軸 (flexible shaft) 連動,如上圖所示。這樣做的目的是為了減少齒輪損耗的同時減輕自身重量和轉動慣量,以便取得更好的機動性。
三、建 模
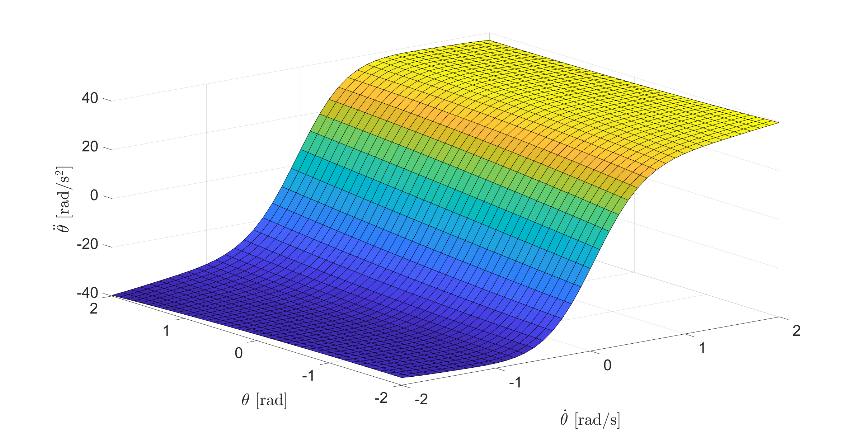
省略掉枯燥繁瑣的系統性數學建模,值得一提的是動力學模型在平衡點(OmBURo身體豎直,角度和角速度都為零)的附近基本上是線性的,如下圖所示。這也解釋了為何使用簡單的線性控制器(基于線性化后的模型)對于類似自平衡移動機器人,就能有很好的平衡性能。
四、控制器
剛才提到線性控制器,對于類似自平衡系統可能已經足夠,但此結論是基于傳感器可以提供準確讀數的情況下,或者說,可以提供與模型狀態變量一致的測量數據,而這一假設在現實中,基本無法實現,這也是為什么我們需要狀態估計 (state estimation) 的原因。
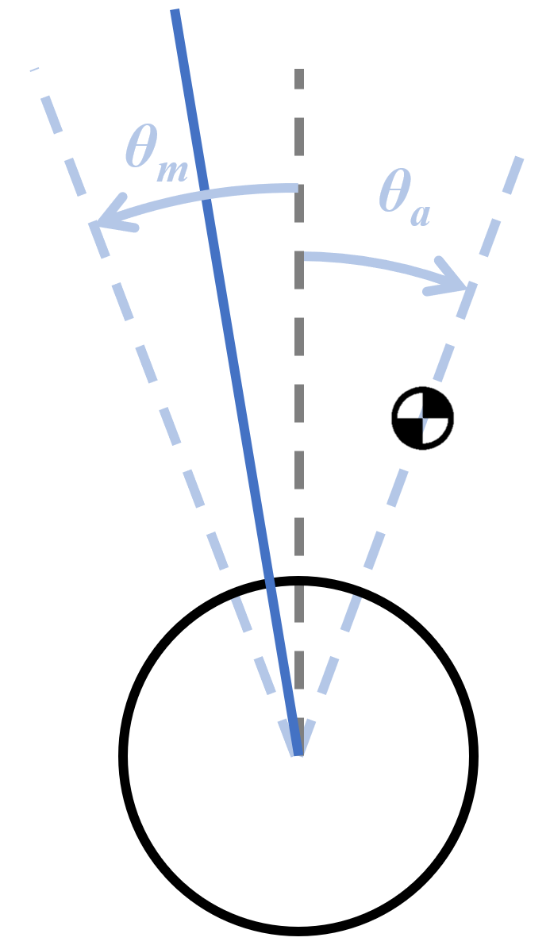
舉個例子,我們的狀態變量包括身體的角度,模型的角度θa是對于質心的(因為當θa為零時OmBURo才能平衡),而實際讀取到的角度θm,由于IMU裝配誤差和自身偏差,可能沒有任何物理意義(你也不知道它測量的到底是啥),當然這兩個角度實際上不會差很多,但對于自平衡移動機器人,一點點誤差也是致命的。
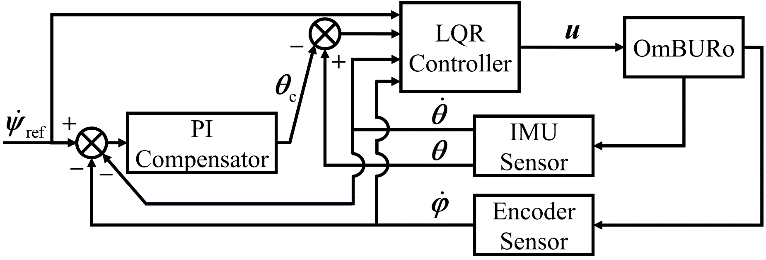
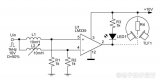
幸運的是,對于這類自平衡移動機器人,相比復雜的狀態估計,我們有一個更加便捷的方法處理這一問題。我們首先可以以θm讀數為基準設計控制器,如果目標是OmBURo速度為零原地平衡,但結果是它持續往某一方向(比如向右)移動的話,那我們則可知需要向反方向(比如向左)調整θm讀數,調整的大小可基于OmBURo的移動距離以及速度,反之亦然。綜上,我們設計的控制器如下圖所示,包含一個基于模型的LQR控制器(用于追蹤參考速度)以及一個用于調整角度讀數的PI控制器。
五、實驗結果
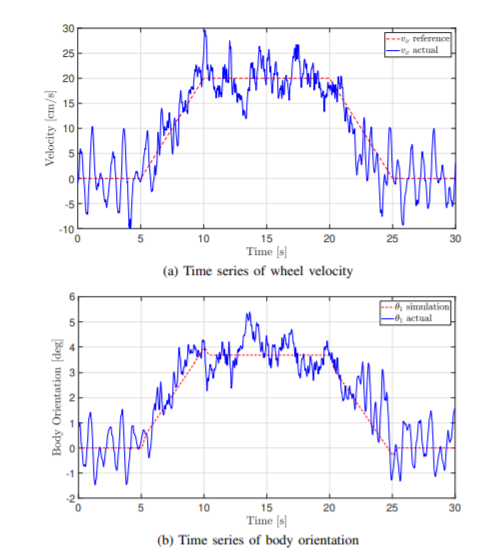
基于以上OmBURo樣機以及控制器設計,我們成功完成了一系列實驗測試,包括原地自平衡、自抗擾、速度跟蹤、路徑跟隨、甚至斜坡平衡。

責任編輯:xj
-
機器人
+關注
關注
211文章
28384瀏覽量
206919 -
移動裝置
+關注
關注
0文章
13瀏覽量
8296 -
自平衡
+關注
關注
0文章
6瀏覽量
7137
發布評論請先 登錄
相關推薦
平衡車哭訴:MOS 管沒選好,我的心里不平衡!
動平衡校正和振動測量有關嗎?


平衡電橋的性質與特點是什么
電橋電路不平衡時是什么電路
如何判斷電橋是否達到平衡狀態
rup是一種什么模型
全向天線與定向天線的區別
非平衡電橋與平衡電橋的異同點?
中科曙光打造一種全新的計算體系構建與運營模式—“立體計算”

一種基于PV變換和CNN模型生成BEV數據的方法

什么是全向天線?全向天線的應用和種類
分享兩種簡單的平衡電橋設備設計





 工商網監
工商網監
評論