 智能3D傳感器與機器人是如何集成工作的?
智能3D傳感器與機器人是如何集成工作的?
制造公司必須使他們的生產和分銷系統自動化以保持領先地位,否則他們將面臨競爭對手的挑戰。通過機器人與傳感器技術,可實現低成本,高產量和多動態的基礎架構來快速響應客戶需求量。
本文探討了如何將3D智能傳感器與機器人緊密集成,從而基于從3D掃描數據得出的“智能”運動實現許多動態制造過程。
機器人配置智能3D傳感器的方法
常用的方法有兩種,一是安裝在框架上,二是安裝在機器人上。
1.安裝在框架上
在機架安裝系統中,傳感器處于與機器人分離的固定位置。傳感器掃描工作區域以定位對象,并將姿勢數據傳送到機械臂。需要進行校準以建立傳感器坐標系和機器人坐標系之間的關系(通常稱為“手對眼”校準),以便可以由機器人拾取3D點云中標識的對象。
3D智能傳感器執行校準,點云采集,零件定位和機器人通信。機器人執行路徑規劃邏輯,該邏輯可以準確有效地移動末端執行器以拾取零件。
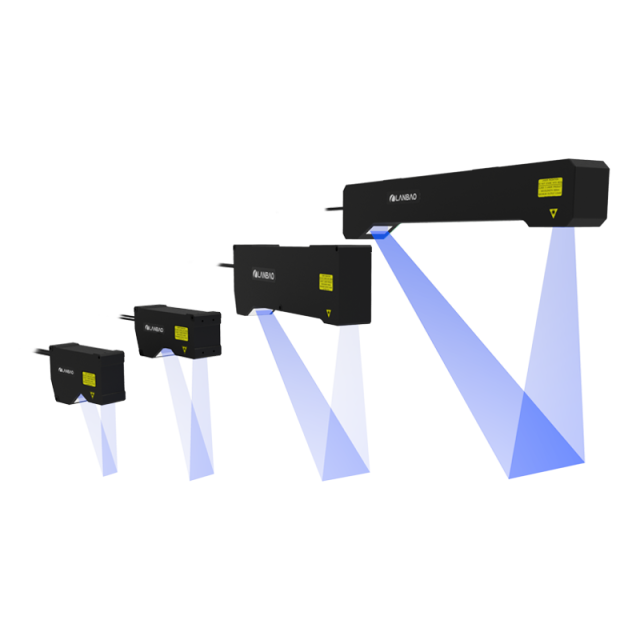
機器人安裝的傳感器,用于掃描和檢查大型目標。資料來源:LMI Technologies
框裝方法在箱揀貨中很常見,其中掃描數據是一個點云,其中包含箱中同一對象的許多隨機堆疊的部分。智能本地化軟件處理點云,以識別下一個要拾取的零件(通常位于堆的頂部)并進入制造過程。
除了用于拾取和放置的對象檢測之外,傳感器還可以用于目標的測量和質量檢查,其中機器人會將要檢查的對象提供給傳感器,并做出通過/不通過決策。
2.安裝在機械臂(手上)
在此配置中,傳感器安裝在機器人末端執行器上,并引導機器人執行實時定位和關鍵任務,例如焊縫跟蹤或組裝。
在機器人手臂上安裝了傳感器的系統所需的校準通常稱為“手眼”校準。在保證準確性的同時,“牽手眼”系統具有高度的靈活性,能夠克服固定工作環境的局限性,并且可以檢查具有許多被遮擋區域的大型目標。
傳感器與機器人集成的關鍵要素:“非智能”與智能方法
1.溝通
與標準的“非智能”傳感器相比,3D智能傳感器的第一個主要優勢是它們可以直接與機器人通信。標準傳感器通常通過主機PC與機器人通信,這會增加延遲,系統成本和集成復雜性。
2.校準。
傳感器-機器人校準的目的是建立傳感器的坐標系與機器人坐標系之間的關系。 這導致了轉換,該轉換將位于3D點云中的零件(傳感器坐標)轉換為機器人可以通過其運動/編碼器子系統(機器人坐標)拾取的姿勢。
校準例程通常需要進行簡短的培訓設置,在此過程中,已知的偽影會在幾個方向上呈現給傳感器(例如球桿)。 分析所得的掃描以提取姿勢數據并建立6自由度轉換,該轉換將球桿位置從3D掃描轉換為相應的機器人位置。
3.測量算法開發。
3D智能傳感器提供內置的測量工具和控制決策,使機器人系統能夠測量和檢查目標物體。 如果沒有昂貴的第三方軟件和外部PC,“非智能”傳感器將無法提供這些相同的檢查功能。
由于您無需編寫任何機器人程序或校準例程,也無需添加第三方軟件或PC,因此使用3D智能傳感器可快速部署解決方案。 如果想實現更高靈活性和控制力,則可以選擇使用軟件開發套件來開發自定義工具并將其嵌入到傳感器中。
智能3D機器人視覺可用于汽車間隙和沖洗檢查。資料來源:LMI Technologies
視覺引導機器人(VGR)的優點
通常,機器人會盲目地重復移動到其工作范圍內的已知位置。借助智能3D機器人視覺引導,機器視覺可根據傳感器的視線提升機器人以執行動態運動,從而使機器人在制造過程中獲得更大的價值。
VGR已在許多行業中使用,包括包裝與物流,汽車,制藥,醫療,電子,食品和飲料。產品和批生產之間的切換是由軟件控制的,并且非常快速,無需進行機械調整。
VGR的制造優勢:
將非智能機器人擴展到更智能的應用程序中
高殘留系統價值,即使更改產量
高機器效率,可靠性和靈活性
進一步降低了體力勞動成本
VGR行業應用示例:
最常見的VGR應用是拾取和放置,傳感器安裝在工作區域上,機器人在該工作區域中執行拾取和放置運動(例如,將零件從傳送帶轉移到箱子)。
VGR的另一個常見應用是零件檢查,其中機器人上的操縱器將傳感器移動到工件上的各種特征以進行檢查(例如,車身上的間隙和齊平檢查,或孔和螺柱尺寸公差)。
最后,VGR的最復雜的應用是機器人上的機械手拾取包含多個傳感器的“夾具”,并進行編程以拾取工件并使用傳感器反饋引導其插入更大的組件中(例如,門板或擋風玻璃插入)。
來源:傳感器專家網
責任編輯:haq
-
傳感器
+關注
關注
2551文章
51194瀏覽量
754412 -
機器人
+關注
關注
211文章
28476瀏覽量
207416 -
3D
+關注
關注
9文章
2889瀏覽量
107630 -
自動化
+關注
關注
29文章
5592瀏覽量
79386
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
開源項目!能夠精確地行走、跳舞和執行復雜動作的機器人—Tillu
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
禾賽將推出機器人領域迷你3D激光雷達

Sonair推出用于機器人避障的3D超聲波傳感器
【書籍評測活動NO.51】具身智能機器人系統 | 了解AI的下一個浪潮!
觸覺傳感器的發展,對機器人產業有什么影響?
3D激光線掃輪廓傳感器在汽車行業的汽車車縫檢測的應用

銳達儀表3D掃描機器人:工業測量的革命性創新

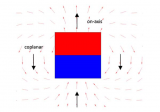
3D霍爾效應位置傳感器的基本原理及其應用案例





 工商網監
工商網監
評論