 自動駕駛車輛面對碰撞時如何將損失降到最低?
自動駕駛車輛面對碰撞時如何將損失降到最低?
百度董事長兼首席執行官李彥宏在百度世界大會2020上預測自動駕駛5年后全面商用,擁堵大大緩解、不再需要限購限行。
他表示,當無人駕駛逐漸普及,交通事故發生率也會大大降低。通過測算,以車路協同為基礎的智能交通基礎設施建設,將能夠提升15%-30%的通行效率,從而為GDP貢獻2.4%-4.8%的絕對增長。
在自動駕駛技術中,運動規劃和控制是關鍵操作,自動駕駛的目標是在遵循交通規則的情況下規劃和導航從起始位置到目的位置的道路,并盡可能地避免任何碰撞。
車輛的碰撞往往會造成非常嚴重的事故,不僅危害駕駛人員安全,同時對于其他人或者車輛也都存在潛在的危險,那么對于自動駕駛車輛,該如何在面對不可避免的碰撞時做出正確的反應,來將損失降到最低呢?
百度在18年3月8日申請了一項名為“基于碰撞后分析的自動駕駛車輛的車輛動作優化”的發明專利(申請號:201880002895.9),申請人為百度時代網絡技術(北京)有限公司。
根據該專利目前公開的資料,讓我們一起來看看這項發生碰撞時緊急避險的技術吧。
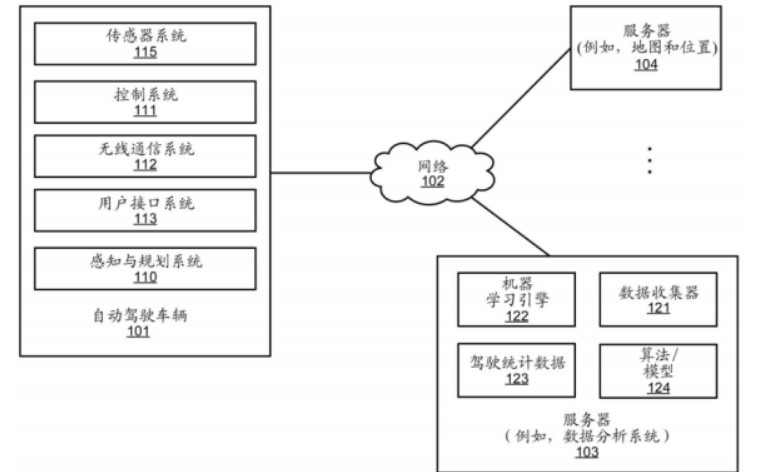
如上圖,為該專利發明的網絡化系統框圖,網絡配置100包括通過網絡102通信的自動駕駛車輛101,車輛上分布有用于自動駕駛所必須的模塊,如:感知與規劃系統110、車輛控制系統111、無線通信系統112、用戶接口系統113、資訊娛樂系統114和傳感器系統115。
和其他方案不同的是,該專利將自動駕駛車輛上的各個功能按照模塊進行劃分,從功能抽象層次來進行設計。而自動駕駛車輛通過網絡與機器學習服務器以及地圖服務器等相連,在機器學習服務器中,可以對于車輛傳遞回來的信息進行檢測和識別,例如:路況識別、交通標志識別、車道線識別等。
而為了能夠在發生碰撞時做出緊急反應,就更加依靠車輛周圍環境的情況采集,通過傳感器系統以及感知與規劃系統、結合地圖服務器反饋的信息等做出正確的反應,從而將碰撞后的損失降到最低。
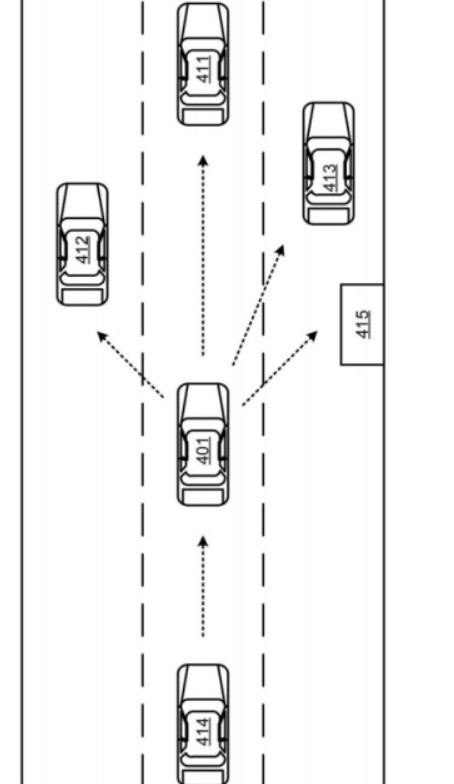
如上圖,是一個特定駕駛環境的示意圖,可以看到,無人駕駛車輛401被其余411-415四輛車所包圍,因此無人駕駛車輛的規劃模塊可以基于由感知模塊提供的駕駛環境的感知信息和由預測模塊提供的對象的行為預測來確定是否無法避免與其他車輛發生碰撞。
例如,無人駕駛車輛的速度與前方車輛之間的速度過大而距離過小而無法及時剎車時,系統就會向無人駕駛車輛發出最大制動命令,這樣由可能可以避免發生碰撞。但是,當道路情況變得復雜時,這種簡單的策略往往會失效,因為當與前車距離過小而緊急制動時,有可能會與后面的車輛發生碰撞。
因此,假設系統中的碰撞是不可避免時,讓無人駕駛車輛智能的選擇最小損失的方案進行碰撞才是明智的選擇。例如當無人駕駛車輛要與前車相撞時,假設左側為人群,右側為垃圾桶,則無人駕駛車輛向右急轉撞向垃圾桶才會不會對行人造成傷害以及減少損失。
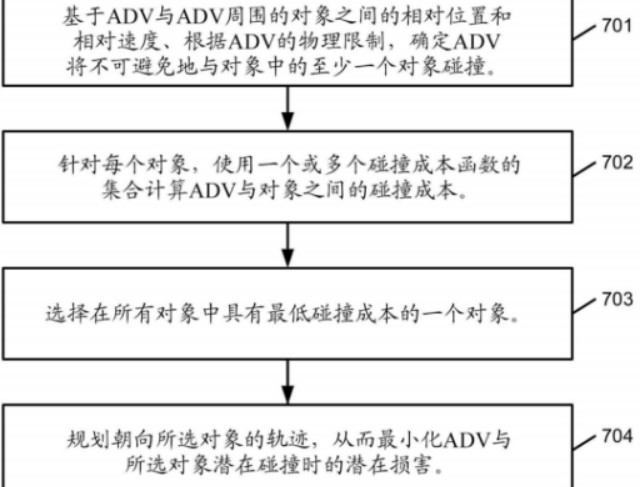
如上圖,為該專利發明的自動駕駛車輛的過程流程圖,首先,無人駕駛汽車會基于自身以及周圍對象之間的相對位置和相對速度,根據計算來確定是否會發生不可避免碰撞的情形。此時,就需要進行更加詳細的計算,既然碰撞無法避免,那么與每個對象的碰撞成本約為多少,該如何選擇碰撞對象就成為下一步的任務。
在對周圍對象進行碰撞成本估計后,無人駕駛車輛就會選擇碰撞成本最低的一個對象,這樣不僅對于車主,對于周圍的行人以及其他車輛來說,只要確保成本計算方法是合理的,就可以將損失降低到最小。
以上就是百度發明的當不可避免的碰撞發生時車輛的應對方案,基于車輛對于周圍環境的分析以及對于可能碰撞對象損失的估計,從而找到一個最優的碰撞方案。不得不說,這樣的系統確實可以作為保證人們利益的最后一道保護屏障,倘若五年后無人駕駛車輛真的有了大規模的應用,相信這樣的技術肯定會非常實用。
關于嘉德
深圳市嘉德知識產權服務有限公司由曾在華為等世界500強企業工作多年的知識產權專家、律師、專利代理人組成,熟悉中歐美知識產權法律理論和實務,在全球知識產權申請、布局、訴訟、許可談判、交易、運營、標準專利協同創造、專利池建設、展會知識產權、跨境電商知識產權、知識產權海關保護等方面擁有豐富的經驗。
責任編輯:tzh
-
網絡
+關注
關注
14文章
7556瀏覽量
88733 -
無人駕駛
+關注
關注
98文章
4054瀏覽量
120451 -
自動駕駛
+關注
關注
784文章
13786瀏覽量
166402
發布評論請先 登錄
相關推薦
一文聊聊自動駕駛測試技術的挑戰與創新

使用STT全面提升自動駕駛中的多目標跟蹤

聊聊自動駕駛離不開的感知硬件
車廠如何安全有效做自動駕駛路測?

FPGA在自動駕駛領域有哪些優勢?
FPGA在自動駕駛領域有哪些應用?
自動駕駛識別技術有哪些
自動駕駛的傳感器技術介紹
自動駕駛汽車傳感器有哪些
未來已來,多傳感器融合感知是自動駕駛破局的關鍵
自動駕駛發展問題及解決方案淺析
Waymo自愿召回444輛自動駕駛汽車 L4的自動駕駛還有很多路要走







 工商網監
工商網監
評論