 步進電機的拆解、特征及優缺點
步進電機的拆解、特征及優缺點
據說步進電機不能拆,但是為了滿足好奇心,該出手時就出手。 將要拆開的28BYJ-48,這是學單片機控制技術中最常見的一種。
打開上蓋后的減速齒輪

減速齒輪特寫

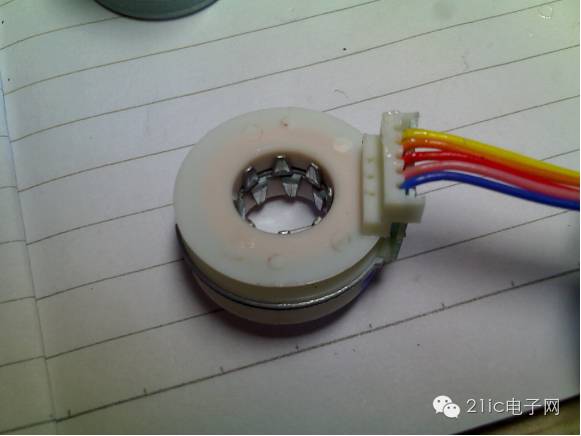
轉子

定子繞組
繞組特寫
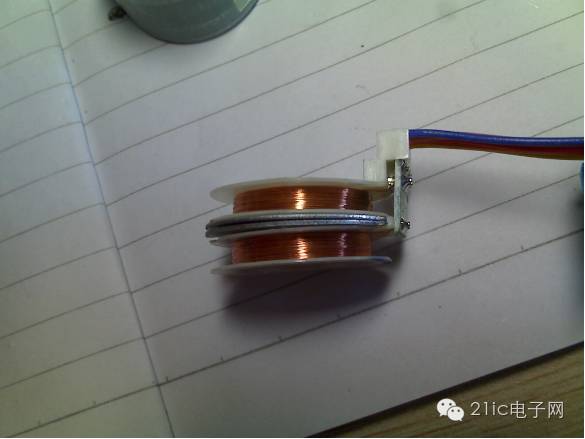
只剩下后蓋了

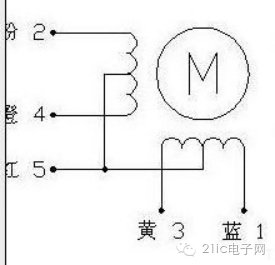
繞組上的接線:
這一看,步進電機好像沒什么。實際上,里面的學問大著呢。 步進電機 步進電機是一種將電脈沖轉化為角位移的執行機構。通俗一點講:當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度(即步進角)。您可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的;同時您可以通過控制脈沖頻率來 控制電機轉動的速度和加速度,從而達到調速的目的。 雖然步進電機已被廣泛地應用,但步進電機并不能像普通的直流電機,交流電機在常規下使用。它必須由雙環形脈沖信號、功率驅動電路等組成控制系統方可使用。因此用好步進電機卻非易事,它涉及到機械、電機、電子及計算機等許多專業知識。 步進電機主要由兩部分構成:定子和轉子,它們均由磁性材料組成。以三相步進電機為例,其定子和轉子上分別有六個、四個磁極。
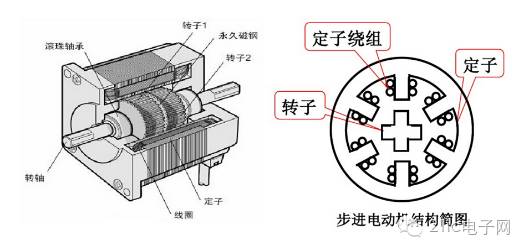
定子上的六個磁極上有控制繞組,兩個相對的磁極組成一相。
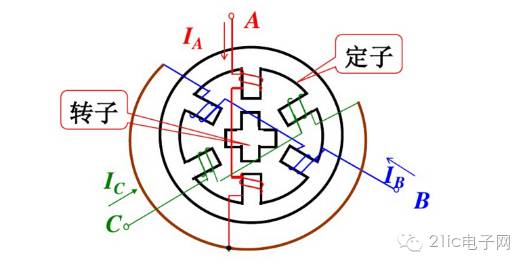
注意:這里的相和三相交流電中的“相”概念不一樣,步進電機通的是直流脈沖。 按照繞組的通電順序,三相步進電機的工作方式可分為:三相單三拍、三相單雙六拍、三相雙三拍等。 步進電機的主要特點:1.一般步進電機的精度為步進角的3-5%,且不累積。 2.步進電機外表允許的最高溫度。 步進電機溫度過高首先會使電機的磁性材料退磁,從而導致力矩下降乃至 于失步,因此電機外表允許的最高溫度應取決于不同電機磁性材料的退磁點;一般來講,磁性材料的退磁點都在攝氏130度以上,有的甚至高達攝氏200度以 上,所以步進電機外表溫度在攝氏80-90度完全正常。 3.步進電機的力矩會隨轉速的升高而下降。步進電機轉動時,電機各相繞組的電感將形成一個反向電動勢;頻率越高,反向電動勢越大。在它的作用下,電機隨頻率(或速度)的增大而相電流減小,從而導致力矩下降。 4.步進電機低速時可以正常運轉,但若高于一定速度就無法啟動,并伴有嘯叫聲。 步進電機有一個技術參數:空載啟動頻率,即步進電機在空載情況下能夠 正常啟動的脈沖頻率,如果脈沖頻率高于該值,電機不能正常啟動,可能發生丟步或堵轉。在有負載的情況下,啟動頻率應更低。如果要使電機達到高速轉動,脈沖 頻率應該有加速過程,即啟動頻率較低,然后按一定加速度升到所希望的高頻(電機轉速從低速升到高速)。
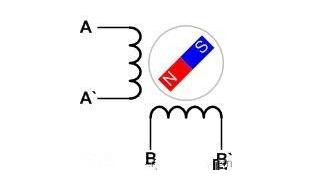
5 步進電機必須加驅動才可以運轉, 驅動信號必須為脈沖信號,沒有脈沖的時候, 步進電機靜止, 如果加入適當的脈沖信號,就會以一定的角度(稱為步角)轉動。轉動的速度和脈沖的頻率成正比。 6 三相步進電機的步進角度為7.5 度,一圈360度,需要48個脈沖完成。 7 步進電機具有瞬間啟動和急速停止的優越特性。 8 改變脈沖的順序,可以方便的改變轉動的方向。因此,目前打印機,繪圖儀,機器人,等等設備都以步進電機為動力核心。
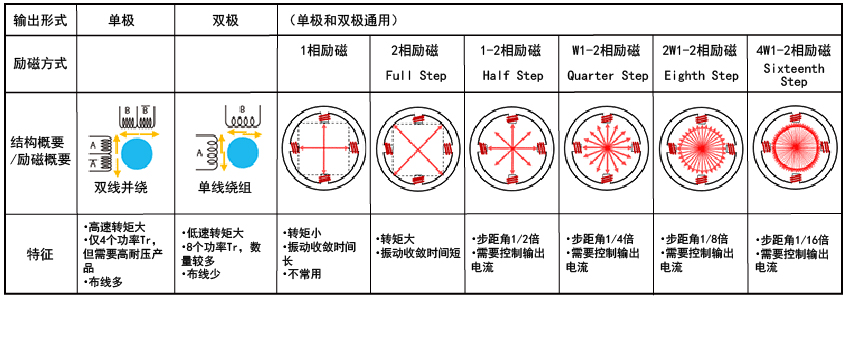
步進電機驅動器的特點(1)構成步進電機驅動器系統的專用集成電路: A、脈沖分配器集成電路:如三洋公司的PMM8713、PMM8723、PMM8714等。 B、包含脈沖分配器和電流斬波的控制器集成電路:如SGS公司的L297、L6506等。 C、只含功率驅動(或包含電流控制、保護電路)的驅動器集成電路:如日本新電元工業公司的MTD1110(四相斬波驅動)和MTD2001(兩相、H橋、斬波驅動)。 D、將脈沖分配器、功率驅動、電流控制和保護電路都包括在內的驅動控制器集成電路,如東芝公司的TB6560AHQ、MOTOROLA公司的SAA1042(四相)和ALLEGRO公司的UCN5804(四相)等。 (2)“細分驅動”概述:將“電機固有步距角”細分成若干小步的驅動方法,稱為細分驅動,細分是通過驅動器精確控制步進電機的相電流實現的,與電機本 身無關。其原理是,讓定子通電相電流并不一次升到位,而斷電相電流并不一次降為0(繞組電流波形不再是近似方波,而是N級近似階梯波),則定子繞組電流所 產生的磁場合力,會使轉子有N個新的平衡位置(形成N個步距角)。 步進電機分類步進電機分三種:永磁式(PM)、反應式(VR)和混合式(HB)。永磁式步進一般為兩相,轉矩和體積較小,步進角一般為7.5度或15度;反應式步進一般為三相,可實現大轉矩輸出,步進角一般為1.5度,但噪聲和振動都很大,在歐美等發達國家80年代已被淘汰;混合式步進是指混合了永磁式和反應式的優點,分為兩相和五相,兩相步進角一般為1.8度而五相步進角一般為0.72度,這種步進電機的應用最為廣泛。
步進電機的優缺點優點1. 電機旋轉的角度正比于脈沖數; 2. 電機停轉的時候具有最大的轉矩(當繞組激磁時); 3. 由于每步的精度在百分之三到百分之五,而且不會將一步的誤差積累到下一步因而有較好的位置精度和運動的重復性; 4. 優秀的起停和反轉響應; 5. 由于沒有電刷,可靠性較高,因此電機的壽命僅僅取決于軸承的壽命; 6. 電機的響應僅由數字輸入脈沖確定,因而可以采用開環控制,這使得電機的結構可以比較簡單而且控制成本; 7. 僅僅將負載直接連接到電機的轉軸上也可以極低速的同步旋轉。 8. 由于速度正比于脈沖頻率,因而有比較寬的轉速范圍。
缺點1. 如果控制不當容易產生共振; 2. 難以運轉到較高的轉速。 3. 難以獲得較大的轉矩 4. 在體積重量方面沒有優勢,能源利用率低。
5. 超過負載時會破壞同步,高速工作時會發出振動和噪聲。
注:本文轉載自網絡,版權歸原作者所有,如涉及侵權,請聯系小編刪除
責任編輯:PSY
原文標題:知識 | 步進電機拆解及其基本介紹
文章出處:【微信公眾號:電機控制設計加油站】歡迎添加關注!文章轉載請注明出處。
-
單片機
+關注
關注
6035文章
44554瀏覽量
634659 -
步進電機
+關注
關注
150文章
3109瀏覽量
147443 -
控制技術
+關注
關注
3文章
344瀏覽量
33150
原文標題:知識 | 步進電機拆解及其基本介紹
文章出處:【微信號:motorcontrol365,微信公眾號:電機控制設計加油站】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
一文解析步進電機三種驅動方式的優缺點
步進電機與直流電機的優缺點及與伺服電機區別






 工商網監
工商網監
評論