 一招教你輕松搞定PID調節
一招教你輕松搞定PID調節
只要一個安裝博圖軟件的電腦,就可以做PID調節(需要裝被控系統仿真塊)
一.PID功能
PID功能用于對閉環過程進行控制(有反饋的)。PID控制適用于溫度,壓力,流量等物理量,是工業現場中應用最為廣泛的一種控制方式,其原理是,對被控對象設定一個給定值,然后將實際值測量出來,并與給定值比較,將其差值送入PID控制器,PID控制器按照一定的運算規律,計算出結果,即為輸出值,送到執行器進行調節,其中的P,I,D指的是比例,積分,微分,是一種閉環控制算法。通過這些參數,可以使被控對象追隨給定值變化并使系統達到穩定,自動消除各種干擾對控制過程的影響。
二.有兩種方式選擇 PID 的指令版本
方式一
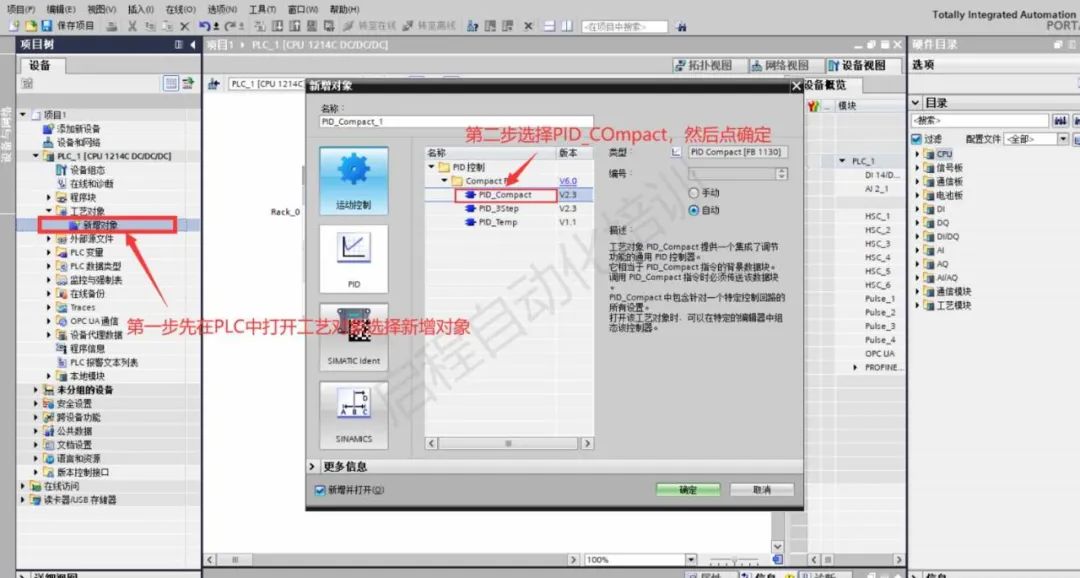
方式二
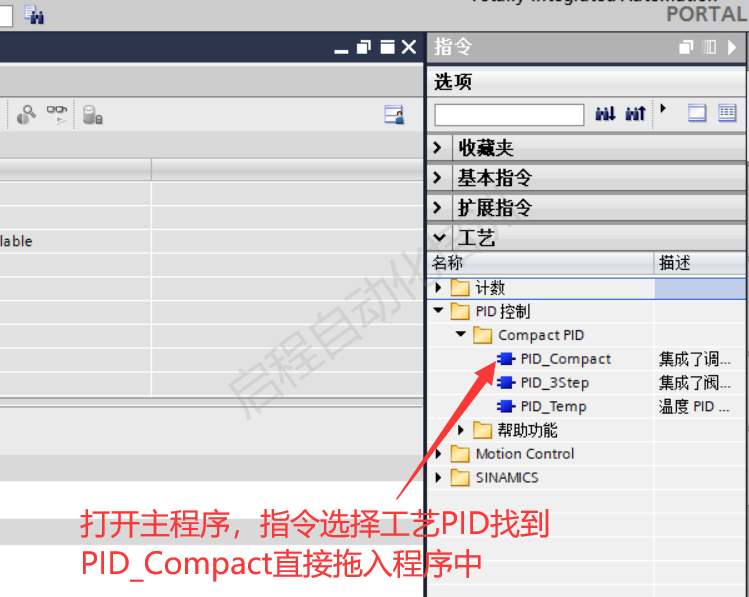
這里使用第二種方式。
組態

(1)

這里設置CPU啟動后PID的模式
非活動:不運行PID調節
預調節:控制器初步自動尋找PID參數
精確調節:控制器精確自動尋找PID參數(先預調節才能精確調節)
手動模式:控制器按照預設值固定輸出
自動模式:控制器根據PID參數調節被控對象。
如果控制器輸出和反饋值成反比,勾選反轉控制邏輯
(2)
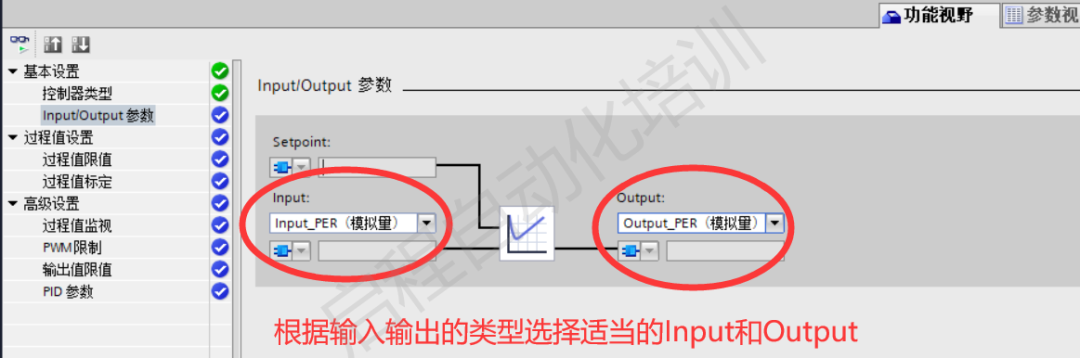
(3)
Input:已經轉換的輸入(一般填工程量)
Input_PER:沒有轉換的(一般填數字量)
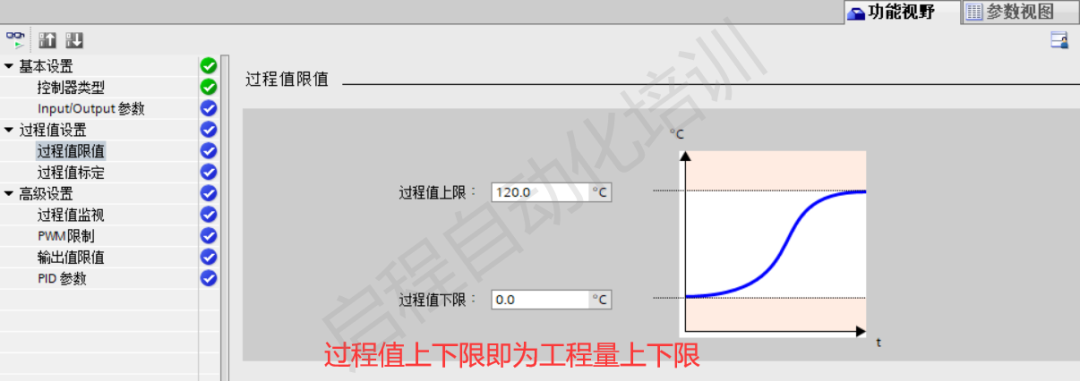
(4)

(5)

(6)

輸出值的范圍設定,在上限和下限范圍內,用百分比表示
這里參數是PID默認參數,可通過勾選啟用手動收入,改變參數
PID參數除了在組態里面修改還有以下方法
組態完成后調用PID塊
(1)

PID仿真只有1500才能使用,1200不可仿真
下來以被控系統仿真塊(LSim_PT3)來做PID調節

該塊的算法

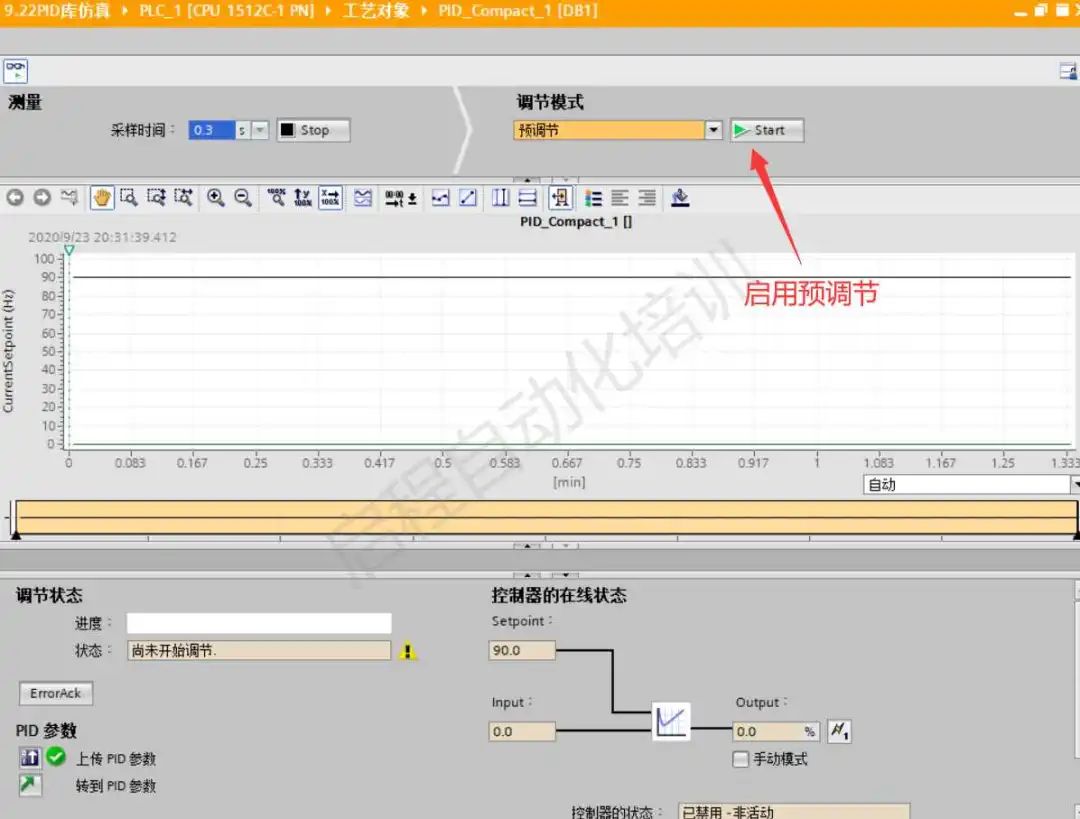
1. 打開PID調試

2.啟動預調節(自動尋找PID參數)
設置好參數后,進入PID調試界面,點擊開始采樣
啟動預調節的必要條件:
1.已在循環中斷 OB 中調用 "PID_Compact" 指令。
2.ManualEnable = FALSE 且 Reset = FALSE
3.PID_Compact 處于下列模式之一:"未激活"、"手動模式"或"自動模式"。
4.設定值和過程值均處于組態的限值范圍內。
5.| 設定值 – 過程值 | > 0.3 * | 過程值上限 – 過程值下限 |
6.| 設定值 – 反饋值 | > 0.5 * | 設定值 |
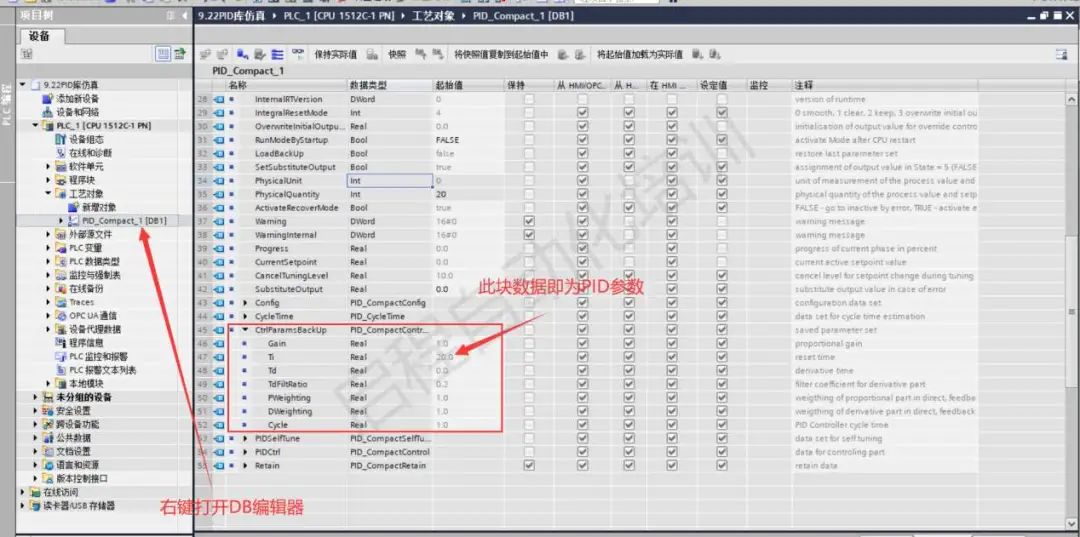
3.
上傳PID參數,是將新的PID參數上傳為默認參數
轉到PID參數,可以查看或者修改
PID參數:
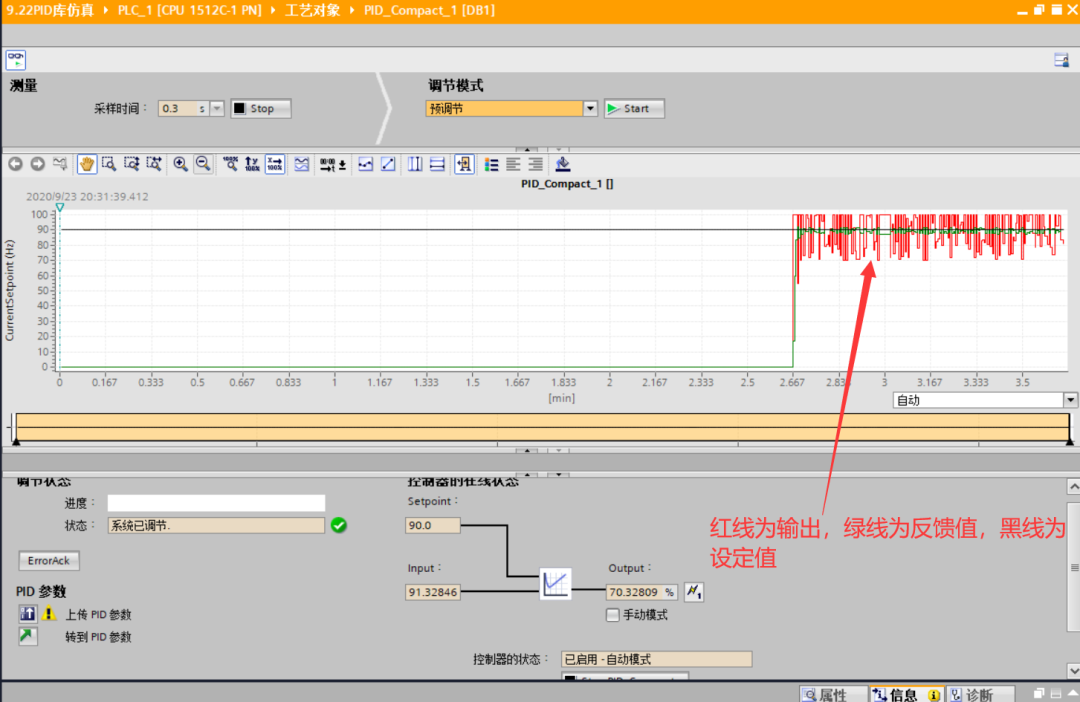
當調節完成后,狀態欄顯示系統已調節
可在進度欄查看調節的啟動預調節的必bai要條件:
已在循環中斷 OB 中調用 "PID_Compact" 指令。
ManualEnable = FALSE 且 Reset = FALSE
PID_Compact 處于下列模式之一:"未激活"、"手動模式"或"自動模式"。
設定值和過程值均處于組態的限值范圍內。
| 設定值 – 過程值 | > 0.3 * | 過程值上限 – 過程值下限 |
| 設定值 – 反饋值 | > 0.5 * | 設定值 |進度
控制器在線狀態:目前設定值 輸入值 輸出值
上傳PID參數:是將新的PID參數上傳為默認參數
轉到PID參數,可以查看或者修改PID參數
控制器狀態:當前PID模式 (勾選手動模式 啟動手動模式 )
點擊START PID_COMPACT按鈕開始自動模式
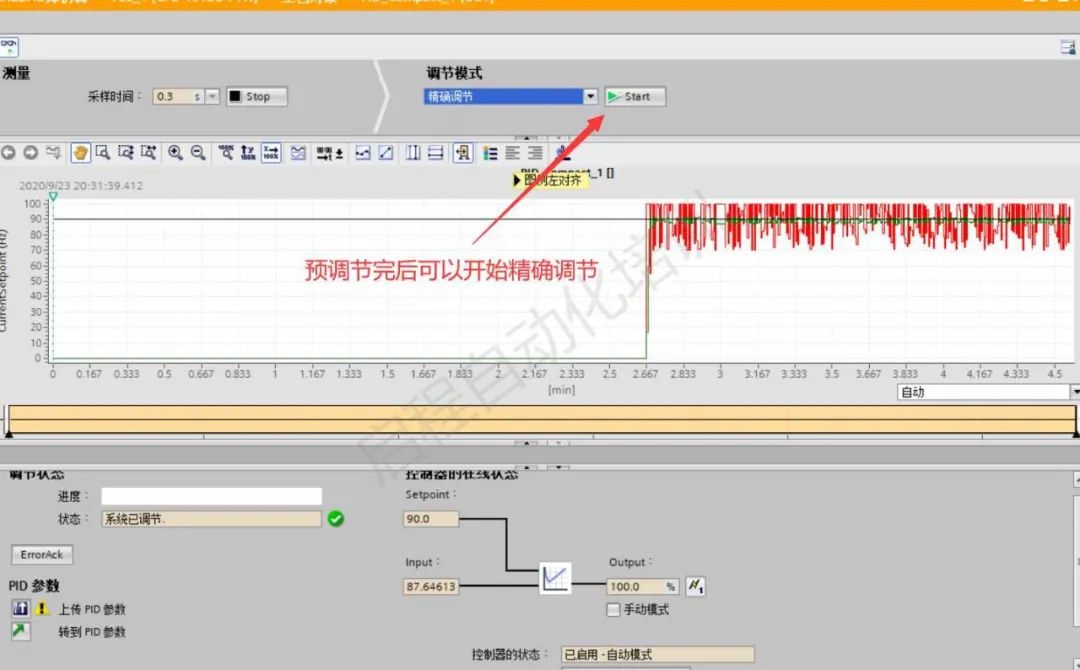
4. 在預調節結束后,可以開始精確調節
啟動精確調節的必要條件:
1).已在循環中斷 OB 中調用 "PID_Compact" 指令。
2).ManualEnable = FALSE 且 Reset = FALSE
3).PID_Compact 處于下列模式之一:"未激活"、"手動模式"或"自動模式"。
4).設定值和過程值均處于組態的限值范圍內。
5).| 設定值 – 過程值 | < 0.3 * | 過程值上限 – 過程值下限 |
責任編輯:PSY
原文標題:學習博途PID調節,一招教你輕松搞定
文章出處:【微信公眾號:PLC技術圈】歡迎添加關注!文章轉載請注明出處。
-
控制方式
+關注
關注
0文章
55瀏覽量
10736 -
PID
+關注
關注
35文章
1472瀏覽量
85564 -
PID調節
+關注
關注
0文章
13瀏覽量
7036
原文標題:學習博途PID調節,一招教你輕松搞定
文章出處:【微信號:xue_PLC,微信公眾號:PLC技術圈】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
教你三招異地訪問NAS
存儲空間告急?NAS擴容一招搞定,輕松無憂!
Air780E模組LuatOS開發實戰 —— 手把手教你搞定數據打包解包

基于PID控制的溫度調節系統
如何調節PID參數 PID控制器的調試方法
什么是PID調節器的三種模式
PID控制的優缺點分析 PID參數調節的常見方法
開關電源輻射老是超?教你一個好方法搞定它

PID調節器的作用和工作原理
教你一招,一鍵解鎖云盤與NAS自動同步!

教你一招,簡化儀器Python編程控制!
一招教你如何解決管材激光切割機割不透毛邊問題

存儲空間滿了?學會這一招,給設備瘦瘦身






 工商網監
工商網監
評論