 RFID在煤礦安全中的工作原理以及主要功能
RFID在煤礦安全中的工作原理以及主要功能
目前,煤礦井下普遍存在入井人員管理困難,管理人員難以及時掌握井下人員的動態分布及作業情況,一旦事故發生,對井下人員的搶救缺乏可靠信息,搶險救災、安全救護的效率低。引入和運用煤礦井下人員定位系統,工作人員佩戴的電子標簽通過井下監控節點向監控中心傳送他們的位置信息,實時掌握每個人在井下的位置及活動軌跡,對煤礦的安全生產將有積極作用,在一定程度上減少人員傷亡。平時,上傳的位置信息也可以用做工作人員的考勤記錄。
1、射頻識別技術
1.1 射頻識別發展
RFID 是 20 世紀 90 年代興起的一種非接觸式的新型自動識別技術, 它利用無線傳輸方式進行雙向數據通信, 進而達到自動識別并交換信息的目的。近年來, 自動識別技術得到了快速普及和推廣, 自動識別方法多種多樣: 條形碼是一種應用廣泛、廉價的自動識別術, 但條形碼信息量小, 不能改寫; 有觸點排的 IC 卡是電子數據載體最普遍的結構, 但在許多情況下, 機械觸點的接通是不可靠的;RF ID 卻可以讓物品實現真正的自動化管理, 其優勢非常明顯: 存儲信息量大, 每一個產品擁有獨一無二的 ID 號; 讀寫不需要光源, 可以透過外部材料讀取數據; 使用壽命長,能在惡劣環境下工作; 能夠輕易嵌入或附著在不同形狀、類型的產品上; 讀取距離更遠, 可以寫入及存取數據, 實現標簽的內容動態改變; 能夠同時處理多個標簽; 標簽的數據存取有密碼保護, 安全性更高; 可以對 RF ID 標簽所附著的物體進行追蹤定位。
1.2射頻識別系統組成
射頻識別系統主要由 Tag、讀寫器、天線等組成, 一般還需要其他軟硬件的支持。
1) 讀寫器。讀寫器可以簡化為兩個基本的功能模塊:高頻接口模塊(發送器和接收器)和控制單元兩部分。讀寫器讀取電子標簽中的信息, 然后將信息發送到地面監控中心。
2) 無源電子標簽。電子標簽由耦合元件和 ASIC ( IC)組成。無源電子標簽, 即沒有自己的電源供給的電子標簽,由讀寫器發出的高頻場提供能量。模擬前端配合解調器從電子標簽天線吸收電流, 整流后使電容充電, 再經穩壓后為電子標簽供電。
CAN 是由 ISO 定義的串行通訊總線, 最初應用在 80 年代末的汽車工業里。它具有高位速率、高抗電磁干擾性、高可靠性而且能夠檢測到產生的任何錯誤。CAN 在微控制器之間需要互相通信或微控制器和遠程的外圍器件要互相通信的情況下是一個理想的解決方法, 在各種控制系統得到了廣泛應用。
CAN 采用了新技術及獨特的設計, 與 RS485 相比具有突出的可靠性、實時性和靈活性。CAN 具有多主節點的網絡特性, 總線利用率高, 數據傳輸速度快, 可擴充性好,通訊距離長, 加中繼器通訊距離可達數十千米, 具有可靠的錯誤處理和檢錯機制, 個別節點失效并不影響整個通訊網絡的運行, 實時性好等優點。另外, CAN 的雙向通信彌補了 RS485 半雙工通信的缺陷, 不僅能夠實現位置信息的上傳, 當需要時還可以實時修改井下某監控接點信息。比較可知, RS - 485 網絡除了硬件成本、開發難度比 CAN -bus 網絡稍具優勢外其他性能方面都沒有可比性。在產品更新速度特別快的今天, 如果將產品的上市時間, 產品的后期維護軟件開發難度等計算在一起, RS - 485 的硬件成本優勢也變得不十分明顯, 因而用 CAN 總線取代 RS - 485 總線是一種比較徹底的方案。
3、煤礦井下人員定位系統設計
3.1定位系統基本構成
系統由井上與井下兩部分設備組成。井上設備主要由監控中心(包括服務器)及共享網絡終端等組成; 井下設備以 CAN 總線作為主傳輸途徑, 開發相應的煤礦井下人員監控節點, 配合天線、電子標簽、傳輸介質、中繼器 R 等與監控中心掛接, 從而實現井下作業人員的定位和安全管理。
3.2定位系統工作原理
定位系統主要實現井下人員及設備安全監測工作。在坑道、作業面的交叉道口安裝監控節點, 入井工作人員按照要求佩戴安裝電子標簽的腰帶, 或佩戴裝有電子標簽的安全帽。RF ID 讀寫器通過固定頻率的射頻載波向電子標簽傳送信號, 電子標簽(工作人員隨身佩戴)進入讀寫器的天線工作區域后被激活, 并將載有個人信息的射頻信號經卡內收發模塊發射出去; 讀寫器天線接收到電子標簽發來的射頻信號, 經過處理后, 提取出個人信息, 通過現場總線送至井上監控中心, 記錄井下工作人員經過地點、時間、活動軌跡等實時信息, 還可自動生成考勤作業的統計與管理等方面的報表資料, 提高管理效益。
3.3定位系統核心部件—RF ID 監控節點
1) RF ID 監控節點硬件設計。監控節點由讀寫器、微控制器(MCU) 、CAN 節點組成。設計中讀寫器使用的射頻芯片是 R I - STU - 650A, 它具有抗干擾能力強、通信速率高、功耗低、性能穩定等優點。考慮到成本等方面的問題,設計時 RF ID 采用的工作頻率為 915MHz, 經過試驗測試,證明在傳輸距離及數據可靠性等方面, 可以達到本系統的功能要求。讀寫器與微控制器 89C51 間利用 SP I 串行接口進行通信。CAN 節點由三部分所構成: 獨立 CAN 控制器 SJA1000、CAN 驅動器 82C250 和高速光電耦合器 6N137。為了增強 CAN 節點的抗干擾能力, SJA1000 并不是直接與 82C250 相連, 而是通過高速光耦 6N137 與 82C250 相連, 這樣就很好的實現了總線上各 CAN 節點間的電氣隔離。
2) RFID 監控節點軟件設計。監控節點單片機軟件設計是使用 C51 和匯編語言混合編程, 包括復位模塊、防沖突模塊、讀寫模塊、通信模塊。當 Tag 被驗證為合法時, 讀寫器才正式讀 / 寫 Tag 數據, 經過信息處理之后, 由 CAN 總線上傳到地面監控心。當 Tag 被驗證為非法時, 讀寫器轉到直接復位應答狀態, 等待下次讀寫操作開始。
3.4系統實現的主要功能
1) 考勤管理功能。通過操作平臺專用管理軟件對下井人員進行下井次數、井下停留時間等信息分類統計, 便于考核, 實現工作人員的考勤統計管理功能和有關報表的打印。
2) 安全保障功能。系統根據數據庫中儲存下來的歷史數據信息, 可迅速知道井下人員及重要設備的分布情況, 一旦出現礦井災難, 可對現場被困人員進行定位和搜尋,便于有效救護。
3) 生產調度功能。通過調用數據庫中的數據, 可以查詢井下人員分布情況并根據需要迅速進行人員調配, 實現井下有限資源的優化配置, 達到事半功倍的效果。
4、 結語
煤礦安全是煤礦生產永恒的主題, 人員監控與定位是實現煤礦安全生產的重要保證之一。為此本文對煤礦人員考勤管理系統進行了調研與分析, 對當前的定位技術進行了研究, 提出了一種以 RF ID 為核心, 以 CAN - bus 通信網絡為紐帶的煤礦井下人員定位系統。經過試驗驗證, 達到了預期的目的, 該系統極大地滿足了實時掌握煤礦入井人員的動態分布及安全管理的需要, 可實現考勤管理功能及快速指導礦井突發性事故的救護工作。
審核編輯 黃昊宇
-
RFID
+關注
關注
388文章
6144瀏覽量
237770 -
射頻識別技術
+關注
關注
0文章
96瀏覽量
16747
發布評論請先 登錄
相關推薦
谷東科技AR技術在煤礦安全巡檢中的應用
漏洞掃描的主要功能是什么
基于AI網關的智慧煤礦安全監測應用

RFID天線的工作原理和主要功能
驍銳安全光柵的主要功能和特點

連接器的主要功能是什么
煤礦安全風險監測預警系統
三維雷達在煤礦安全檢測中如何應用
SMD電感器的主要功能是什么?
傳感器的主要功能是什么

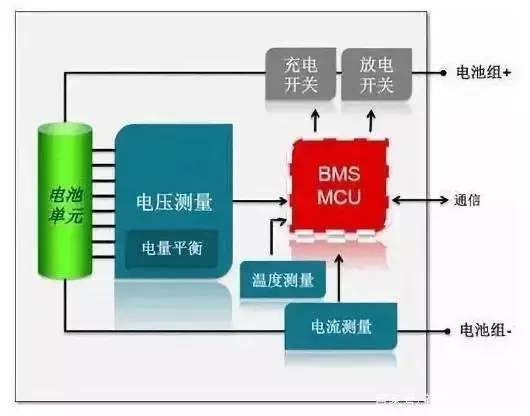
bms主要功能有哪些





 工商網監
工商網監
評論