") 鴻蒙內核源碼分析:任務池管理技術
鴻蒙內核源碼分析:任務池管理技術
任務即線程
在鴻蒙內核中,廣義上可理解為一個任務就是一個線程
官方是怎么描述線程的
基本概念
從系統(tǒng)的角度看,線程是競爭系統(tǒng)資源的最小運行單元。線程可以使用或等待CPU、使用內存空間等系統(tǒng)資源,并獨立于其它線程運行。
鴻蒙內核每個進程內的線程獨立運行、獨立調度,當前進程內線程的調度不受其它進程內線程的影響。
鴻蒙內核中的線程采用搶占式調度機制,同時支持時間片輪轉調度和FIFO調度方式。
鴻蒙內核的線程一共有32個優(yōu)先級(0-31),最高優(yōu)先級為0,最低優(yōu)先級為31。
當前進程內高優(yōu)先級的線程可搶占當前進程內低優(yōu)先級線程,當前進程內低優(yōu)先級線程必須在當前進程內高優(yōu)先級線程阻塞或結束后才能得到調度。
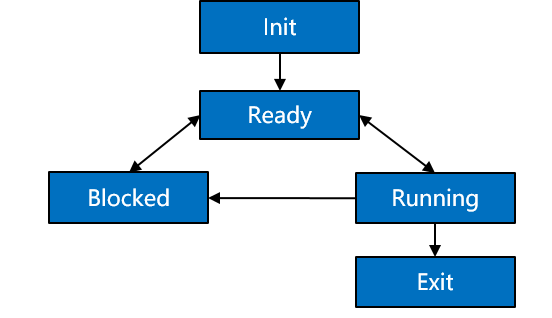
線程狀態(tài)說明:
初始化(Init):該線程正在被創(chuàng)建。
就緒(Ready):該線程在就緒列表中,等待CPU調度。
運行(Running):該線程正在運行。
阻塞(Blocked):該線程被阻塞掛起。Blocked狀態(tài)包括:pend(因為鎖、事件、信號量等阻塞)、suspend(主動pend)、delay(延時阻塞)、pendtime(因為鎖、事件、信號量時間等超時等待)。
退出(Exit):該線程運行結束,等待父線程回收其控制塊資源。
圖 1 線程狀態(tài)遷移示意圖
注意官方文檔說的是線程,沒有提到task(任務),但內核源碼中卻有大量 task代碼,很少有線程(thread)代碼 ,這是怎么回事?
其實在鴻蒙內核中, task就是線程, 初學者完全可以這么理解,但二者還是有區(qū)別,否則干嘛要分兩個詞描述。
會有什么區(qū)別?是管理上的區(qū)別,task是調度層面的概念,線程是進程層面的概念。 就像同一個人在不同的管理體系中會有不同的身份一樣,一個男人既可以是 孩子,爸爸,丈夫,或者程序員,視角不同功能也會不同。
如何證明是一個東西,繼續(xù)再往下看。
執(zhí)行task命令
看shell task 命令的執(zhí)行結果:
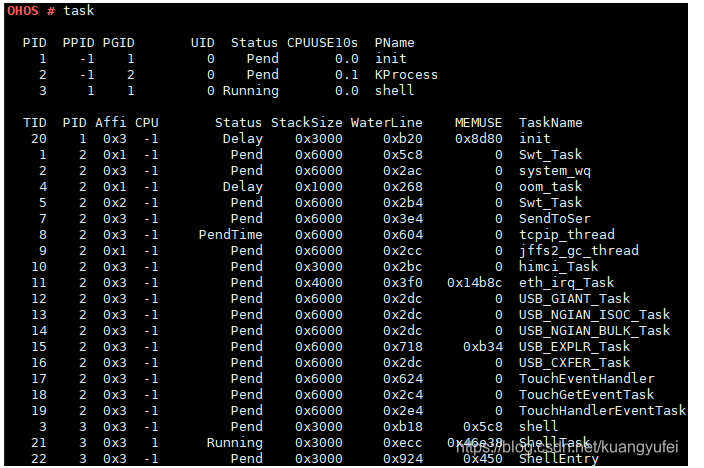
task命令 查出每個任務在生命周期內的運行情況,它運行的內存空間,優(yōu)先級,時間片,入口執(zhí)行函數(shù),進程ID,狀態(tài)等等信息,非常的復雜。這么復雜的信息就需要一個結構體來承載。而這個結構體就是 LosTaskCB(任務控制塊)
對應張大爺?shù)墓适拢簍ask就是一個用戶的節(jié)目清單里的一個節(jié)目,用戶總清單就是一個進程,所以上面會有很多的節(jié)目。
task長得什么樣子
說LosTaskCB之前先說下官方文檔任務狀態(tài)對應的 define,可以看出task和線程是一個東西。
#define OS_TASK_STATUS_INIT 0x0001U #define OS_TASK_STATUS_READY 0x0002U #define OS_TASK_STATUS_RUNNING 0x0004U #define OS_TASK_STATUS_SUSPEND 0x0008U #define OS_TASK_STATUS_PEND 0x0010U #define OS_TASK_STATUS_DELAY 0x0020U #define OS_TASK_STATUS_TIMEOUT 0x0040U #define OS_TASK_STATUS_PEND_TIME 0x0080U #define OS_TASK_STATUS_EXIT 0x0100U
LosTaskCB長什么樣?抱歉,它確實有點長,但還是要全部貼出全貌。
typedef struct {
VOID *stackPointer; /**< Task stack pointer */ //非用戶模式下的棧指針
UINT16 taskStatus; /**< Task status */ //各種狀態(tài)標簽,可以擁有多種標簽,按位標識
UINT16 priority; /**< Task priority */ //任務優(yōu)先級[0:31],默認是31級
UINT16 policy; //任務的調度方式(三種 .. LOS_SCHED_RR )
UINT16 timeSlice; /**< Remaining time slice *///剩余時間片
UINT32 stackSize; /**< Task stack size */ //非用戶模式下棧大小
UINTPTR topOfStack; /**< Task stack top */ //非用戶模式下的棧頂 bottom = top + size
UINT32 taskID; /**< Task ID */ //任務ID,任務池本質是一個大數(shù)組,ID就是數(shù)組的索引,默認 < 128
TSK_ENTRY_FUNC taskEntry; /**< Task entrance function */ //任務執(zhí)行入口函數(shù)
VOID *joinRetval; /**< pthread adaption */ //用來存儲join線程的返回值
VOID *taskSem; /**< Task-held semaphore */ //task在等哪個信號量
VOID *taskMux; /**< Task-held mutex */ //task在等哪把鎖
VOID *taskEvent; /**< Task-held event */ //task在等哪個事件
UINTPTR args[4]; /**< Parameter, of which the maximum number is 4 */ //入口函數(shù)的參數(shù) 例如 main (int argc,char *argv[])
CHAR taskName[OS_TCB_NAME_LEN]; /**< Task name */ //任務的名稱
LOS_DL_LIST pendList; /**< Task pend node */ //如果任務阻塞時就通過它掛到各種阻塞情況的鏈表上,比如OsTaskWait時
LOS_DL_LIST threadList; /**< thread list */ //掛到所屬進程的線程鏈表上
SortLinkList sortList; /**< Task sortlink node */ //掛到cpu core 的任務執(zhí)行鏈表上
UINT32 eventMask; /**< Event mask */ //事件屏蔽
UINT32 eventMode; /**< Event mode */ //事件模式
UINT32 priBitMap; /**< BitMap for recording the change of task priority, //任務在執(zhí)行過程中優(yōu)先級會經(jīng)常變化,這個變量用來記錄所有曾經(jīng)變化
the priority can not be greater than 31 */ //過的優(yōu)先級,例如 ..01001011 曾經(jīng)有過 0,1,3,6 優(yōu)先級
INT32 errorNo; /**< Error Num */
UINT32 signal; /**< Task signal */ //任務信號類型,(SIGNAL_NONE,SIGNAL_KILL,SIGNAL_SUSPEND,SIGNAL_AFFI)
sig_cb sig; //信號控制塊,這里用于進程間通訊的信號,類似于 linux singal模塊
#if (LOSCFG_KERNEL_SMP == YES)
UINT16 currCpu; /**< CPU core number of this task is running on */ //正在運行此任務的CPU內核號
UINT16 lastCpu; /**< CPU core number of this task is running on last time */ //上次運行此任務的CPU內核號
UINT16 cpuAffiMask; /**< CPU affinity mask, support up to 16 cores */ //CPU親和力掩碼,最多支持16核,親和力很重要,多核情況下盡量一個任務在一個CPU核上運行,提高效率
UINT32 timerCpu; /**< CPU core number of this task is delayed or pended */ //此任務的CPU內核號被延遲或掛起
#if (LOSCFG_KERNEL_SMP_TASK_SYNC == YES)
UINT32 syncSignal; /**< Synchronization for signal handling */ //用于CPU之間 同步信號
#endif
#if (LOSCFG_KERNEL_SMP_LOCKDEP == YES) //死鎖檢測開關
LockDep lockDep;
#endif
#if (LOSCFG_KERNEL_SCHED_STATISTICS == YES) //調度統(tǒng)計開關,顯然打開這個開關性能會受到影響,鴻蒙默認是關閉的
SchedStat schedStat; /**< Schedule statistics */ //調度統(tǒng)計
#endif
#endif
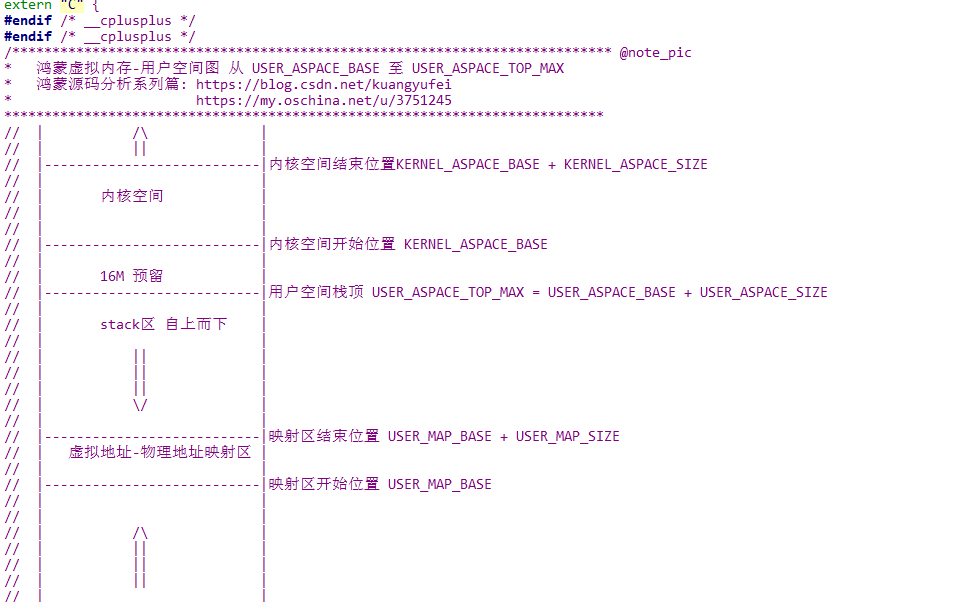
UINTPTR userArea; //使用區(qū)域,由運行時劃定,根據(jù)運行態(tài)不同而不同
UINTPTR userMapBase; //用戶模式下的棧底位置
UINT32 userMapSize; /**< user thread stack size ,real size : userMapSize + USER_STACK_MIN_SIZE */
UINT32 processID; /**< Which belong process *///所屬進程ID
FutexNode futex; //實現(xiàn)快鎖功能
LOS_DL_LIST joinList; /**< join list */ //聯(lián)結鏈表,允許任務之間相互釋放彼此
LOS_DL_LIST lockList; /**< Hold the lock list */ //拿到了哪些鎖鏈表
UINT32 waitID; /**< Wait for the PID or GID of the child process */ //等待孩子的PID或GID進程
UINT16 waitFlag; /**< The type of child process that is waiting, belonging to a group or parent,
a specific child process, or any child process */
#if (LOSCFG_KERNEL_LITEIPC == YES)
UINT32 ipcStatus; //IPC狀態(tài)
LOS_DL_LIST msgListHead; //消息隊列頭結點,上面掛的都是任務要讀的消息
BOOL accessMap[LOSCFG_BASE_CORE_TSK_LIMIT];//訪問圖,指的是task之間是否能訪問的標識,LOSCFG_BASE_CORE_TSK_LIMIT 為任務池總數(shù)
#endif
} LosTaskCB;
結構體LosTaskCB內容很多,各代表什么含義?
LosTaskCB相當于任務在內核中的身份證,它反映出每個任務在生命周期內的運行情況。既然是周期就會有狀態(tài),要運行就需要內存空間,就需要被內核算法調度,被選中CPU就去執(zhí)行代碼段指令,CPU要執(zhí)行就需要告訴它從哪里開始執(zhí)行,因為是多線程,但只有一個CPU就需要不斷的切換任務,那執(zhí)行會被中斷,也需要再恢復后繼續(xù)執(zhí)行,又如何保證恢復的任務執(zhí)行不會出錯,這些問題都需要說明白。
Task怎么管理
什么是任務池?
前面已經(jīng)說了任務是內核調度層面的概念,調度算法保證了task有序的執(zhí)行,調度機制詳見其他姊妹篇的介紹。
如此多的任務怎么管理和執(zhí)行?管理靠任務池和就緒隊列,執(zhí)行靠調度算法。
代碼如下(OsTaskInit):
LITE_OS_SEC_TEXT_INIT UINT32 OsTaskInit(VOID) { UINT32 index; UINT32 ret; UINT32 size; g_taskMaxNum = LOSCFG_BASE_CORE_TSK_LIMIT;//任務池中最多默認128個,可謂鐵打的任務池流水的線程 size = (g_taskMaxNum + 1) * sizeof(LosTaskCB);//計算需分配內存總大小 /* * This memory is resident memory and is used to save the system resources * of task control block and will not be freed. */ g_taskCBArray = (LosTaskCB *)LOS_MemAlloc(m_aucSysMem0, size);//任務池 常駐內存,不被釋放 if (g_taskCBArray == NULL) { return LOS_ERRNO_TSK_NO_MEMORY; } (VOID)memset_s(g_taskCBArray, size, 0, size); LOS_ListInit(&g_losFreeTask);//空閑任務鏈表 LOS_ListInit(&g_taskRecyleList);//需回收任務鏈表 for (index = 0; index < g_taskMaxNum; index++) { g_taskCBArray[index].taskStatus = OS_TASK_STATUS_UNUSED; g_taskCBArray[index].taskID = index;//任務ID最大默認127 LOS_ListTailInsert(&g_losFreeTask, &g_taskCBArray[index].pendList);//都插入空閑任務列表 }//注意:這里掛的是pendList節(jié)點,所以取TCB要通過 OS_TCB_FROM_PENDLIST 取. ret = OsPriQueueInit();//創(chuàng)建32個任務優(yōu)先級隊列,即32個雙向循環(huán)鏈表 if (ret != LOS_OK) { return LOS_ERRNO_TSK_NO_MEMORY; } /* init sortlink for each core */ for (index = 0; index < LOSCFG_KERNEL_CORE_NUM; index++) { ret = OsSortLinkInit(&g_percpu[index].taskSortLink);//每個CPU內核都有一個執(zhí)行任務鏈表 if (ret != LOS_OK) { return LOS_ERRNO_TSK_NO_MEMORY; } } return LOS_OK; }
g_taskCBArray 就是個任務池,默認創(chuàng)建128個任務,常駐內存,不被釋放。
g_losFreeTask是空閑任務鏈表,想創(chuàng)建任務時來這里申請一個空閑任務,用完了就回收掉,繼續(xù)給后面的申請使用。
g_taskRecyleList是回收任務鏈表,專用來回收exit 任務,任務所占資源被確認歸還后被徹底刪除,就像員工離職一樣,得有個離職隊列和流程,要歸還電腦,郵箱,有沒有借錢要還的 等操作。
對應張大爺?shù)墓适拢河脩粢獊韴鲳^領取表格填節(jié)目單,場館只準備了128張表格,領完就沒有了,但是節(jié)目表演完了會回收表格,這樣多了一張表格就可以給其他人領取了,這128張表格對應鴻蒙內核這就是任務池,簡單吧。
就緒隊列是怎么回事
CPU執(zhí)行速度是很快的,鴻蒙內核默認一個時間片是 10ms, 資源有限,需要在眾多任務中來回的切換,所以絕不能讓CPU等待任務,CPU就像公司最大的領導,下面很多的部門等領導來審批,吃飯。只有大家等領導,哪有領導等你們的道理,所以工作要提前準備好,每個部門的優(yōu)先級又不一樣,所以每個部門都要有個任務隊列,里面放的是領導能直接處理的任務,沒準備好的不要放進來,因為這是給CPU提前準備好的糧食!
這就是就緒隊列的原理,一共有32個就緒隊列,進程和線程都有,因為線程的優(yōu)先級是默認32個, 每個隊列中放同等優(yōu)先級的task.
還是看源碼吧
#define OS_PRIORITY_QUEUE_NUM 32
LITE_OS_SEC_BSS LOS_DL_LIST *g_priQueueList = NULL;//隊列鏈表
LITE_OS_SEC_BSS UINT32 g_priQueueBitmap;//隊列位圖 UINT32每位代表一個優(yōu)先級,共32個優(yōu)先級
//內部隊列初始化
UINT32 OsPriQueueInit(VOID)
{
UINT32 priority;
/* system resident resource *///常駐內存
g_priQueueList = (LOS_DL_LIST *)LOS_MemAlloc(m_aucSysMem0, (OS_PRIORITY_QUEUE_NUM * sizeof(LOS_DL_LIST)));//分配32個隊列頭節(jié)點
if (g_priQueueList == NULL) {
return LOS_NOK;
}
for (priority = 0; priority < OS_PRIORITY_QUEUE_NUM; ++priority) {
? ? ? ? LOS_ListInit(&g_priQueueList[priority]);//隊列初始化,前后指針指向自己
? ? }
? ? return LOS_OK;
}
注意看g_priQueueList 的內存分配,就是32個LOS_DL_LIST,還記得LOS_DL_LIST的妙用嗎,不清楚的去鴻蒙系統(tǒng)源碼分析(總目錄)里面翻。
對應張大爺?shù)墓适拢壕褪情T口那些排隊的都是至少有一個節(jié)目單是符合表演標準的,資源都到位了,沒有的連排隊的資格都木有,就慢慢等吧。
任務棧是怎么回事
每個任務都是獨立開的,任務之間也相互獨立,之間通訊通過IPC,這里的“獨立”指的是每個任務都有自己的運行環(huán)境 —— 棧空間,稱為任務棧,棧空間里保存的信息包含局部變量、寄存器、函數(shù)參數(shù)、函數(shù)返回地址等等
但系統(tǒng)中只有一個CPU,任務又是獨立的,調度的本質就是CPU執(zhí)行一個新task,老task在什么地方被中斷誰也不清楚,是隨機的。那如何保證老任務被再次調度選中時還能從上次被中斷的地方繼續(xù)玩下去呢?
答案是:任務上下文,CPU內有一堆的寄存器,CPU運行本質的就是這些寄存器的值不斷的變化,只要切換時把這些值保存起來,再還原回去就能保證task的連續(xù)執(zhí)行,讓用戶毫無感知。鴻蒙內核給一個任務執(zhí)行的時間是 20ms ,也就是說有多任務競爭的情況下,一秒鐘內最多要來回切換50次。
對應張大爺?shù)墓适拢壕褪桥龅焦?jié)目沒有表演完就必須打斷的情況下,需要把當時的情況記錄下來,比如小朋友在演躲貓貓的游戲,一半不演了,張三正在樹上,李四正在廁所躲,都記錄下來,下次再回來你們上次在哪就會哪呆著去,就位了繼續(xù)表演。這樣就接上了,觀眾就木有感覺了。
任務上下文(TaskContext)是怎樣的呢?還是直接看源碼
/* The size of this structure must be smaller than or equal to the size specified by OS_TSK_STACK_ALIGN (16 bytes). */
typedef struct {
#if !defined(LOSCFG_ARCH_FPU_DISABLE)
UINT64 D[FP_REGS_NUM]; /* D0-D31 */
UINT32 regFPSCR; /* FPSCR */
UINT32 regFPEXC; /* FPEXC */
#endif
UINT32 resved; /* It's stack 8 aligned */
UINT32 regPSR;
UINT32 R[GEN_REGS_NUM]; /* R0-R12 */
UINT32 SP; /* R13 */
UINT32 LR; /* R14 */
UINT32 PC; /* R15 */
} TaskContext;
發(fā)現(xiàn)基本都是CPU寄存器的恢復現(xiàn)場值, 具體各寄存器有什么作用大家可以去網(wǎng)上詳查,后續(xù)也有專門的文章來介紹。這里說其中的三個寄存器 SP, LR, PC
LR
用途有二,一是保存子程序返回地址,當調用BL、BX、BLX等跳轉指令時會自動保存返回地址到LR;二是保存異常發(fā)生的異常返回地址。
PC(Program Counter)
為程序計數(shù)器,用于保存程序的執(zhí)行地址,在ARM的三級流水線架構中,程序流水線包括取址、譯碼和執(zhí)行三個階段,PC指向的是當前取址的程序地址,所以32位ARM中,譯碼地址(正在解析還未執(zhí)行的程序)為PC-4,執(zhí)行地址(當前正在執(zhí)行的程序地址)為PC-8, 當突然發(fā)生中斷的時候,保存的是PC的地址。
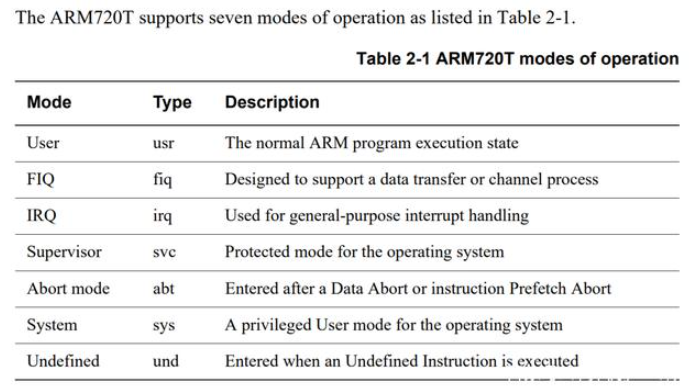
SP
每一種異常模式都有其自己獨立的r13,它通常指向異常模式所專用的堆棧,當ARM進入異常模式的時候,程序就可以把一般通用寄存器壓入堆棧,返回時再出棧,保證了各種模式下程序的狀態(tài)的完整性。
任務棧初始化
任務棧的初始化就是任務上下文的初始化,因為任務沒開始執(zhí)行,里面除了上下文不會有其他內容,注意上下文存放的位置在棧的底部。初始狀態(tài)下 sp就是指向的棧底,棧頂內容永遠是 0xCCCCCCCC "燙燙燙燙",這幾個字應該很熟悉嗎?如果不是那幾個字了,那說明棧溢出了, 后續(xù)篇會詳細說明這塊,大家也可以自行去看代碼,很有意思.
Task函數(shù)集
LITE_OS_SEC_TEXT_INIT VOID *OsTaskStackInit(UINT32 taskID, UINT32 stackSize, VOID *topStack, BOOL initFlag) { UINT32 index = 1; TaskContext *taskContext = NULL; if (initFlag == TRUE) { OsStackInit(topStack, stackSize); } taskContext = (TaskContext *)(((UINTPTR)topStack + stackSize) - sizeof(TaskContext));//注意看上下文將存放在棧的底部 /* initialize the task context */ #ifdef LOSCFG_GDB taskContext->PC = (UINTPTR)OsTaskEntrySetupLoopFrame; #else taskContext->PC = (UINTPTR)OsTaskEntry;//程序計數(shù)器,CPU首次執(zhí)行task時跑的第一條指令位置 #endif taskContext->LR = (UINTPTR)OsTaskExit; /* LR should be kept, to distinguish it's THUMB or ARM instruction */ taskContext->resved = 0x0; taskContext->R[0] = taskID; /* R0 */ taskContext->R[index++] = 0x01010101; /* R1, 0x01010101 : reg initialed magic word */ for (; index < GEN_REGS_NUM; index++) { //R2 - R12的初始化很有意思,為什么要這么做? taskContext->R[index] = taskContext->R[index - 1] + taskContext->R[1]; /* R2 - R12 */ } #ifdef LOSCFG_INTERWORK_THUMB // 16位模式 taskContext->regPSR = PSR_MODE_SVC_THUMB; /* CPSR (Enable IRQ and FIQ interrupts, THUMNB-mode) */ #else taskContext->regPSR = PSR_MODE_SVC_ARM; /* CPSR (Enable IRQ and FIQ interrupts, ARM-mode) */ #endif #if !defined(LOSCFG_ARCH_FPU_DISABLE) /* 0xAAA0000000000000LL : float reg initialed magic word */ for (index = 0; index < FP_REGS_NUM; index++) { taskContext->D[index] = 0xAAA0000000000000LL + index; /* D0 - D31 */ } taskContext->regFPSCR = 0; taskContext->regFPEXC = FP_EN; #endif return (VOID *)taskContext; }
使用場景和功能
任務創(chuàng)建后,內核可以執(zhí)行鎖任務調度,解鎖任務調度,掛起,恢復,延時等操作,同時也可以設置任務優(yōu)先級,獲取任務優(yōu)先級。任務結束的時候,則進行當前任務自刪除操作。
Huawei LiteOS 系統(tǒng)中的任務管理模塊為用戶提供下面幾種功能。
| 功能分類 | 接口名 | 描述 |
|---|---|---|
| 任務的創(chuàng)建和刪除 | LOS_TaskCreateOnly | 創(chuàng)建任務,并使該任務進入suspend狀態(tài),并不調度。 |
| LOS_TaskCreate | 創(chuàng)建任務,并使該任務進入ready狀態(tài),并調度。 | |
| LOS_TaskDelete | 刪除指定的任務。 | |
| 任務狀態(tài)控制 | LOS_TaskResume | 恢復掛起的任務。 |
| LOS_TaskSuspend | 掛起指定的任務。 | |
| LOS_TaskDelay | 任務延時等待。 | |
| LOS_TaskYield | 顯式放權,調整指定優(yōu)先級的任務調度順序。 | |
| 任務調度的控制 | LOS_TaskLock | 鎖任務調度。 |
| LOS_TaskUnlock | 解鎖任務調度。 | |
| 任務優(yōu)先級的控制 | LOS_CurTaskPriSet | 設置當前任務的優(yōu)先級。 |
| LOS_TaskPriSet | 設置指定任務的優(yōu)先級。 | |
| LOS_TaskPriGet | 獲取指定任務的優(yōu)先級。 | |
| 任務信息獲取 | LOS_CurTaskIDGet | 獲取當前任務的ID。 |
| LOS_TaskInfoGet | 設置指定任務的優(yōu)先級。 | |
| LOS_TaskPriGet | 獲取指定任務的信息。 | |
| LOS_TaskStatusGet | 獲取指定任務的狀態(tài)。 | |
| LOS_TaskNameGet | 獲取指定任務的名稱。 | |
| LOS_TaskInfoMonitor | 監(jiān)控所有任務,獲取所有任務的信息。 | |
| LOS_NextTaskIDGet | 獲取即將被調度的任務的ID。 |
創(chuàng)建任務的過程
創(chuàng)建任務之前先了解另一個結構體 tagTskInitParam
typedef struct tagTskInitParam {//Task的初始化參數(shù)
TSK_ENTRY_FUNC pfnTaskEntry; /**< Task entrance function */ //任務的入口函數(shù)
UINT16 usTaskPrio; /**< Task priority */ //任務優(yōu)先級
UINT16 policy; /**< Task policy */ //任務調度方式
UINTPTR auwArgs[4]; /**< Task parameters, of which the maximum number is four */ //入口函數(shù)的參數(shù),最多四個
UINT32 uwStackSize; /**< Task stack size */ //任務棧大小
CHAR *pcName; /**< Task name */ //任務名稱
#if (LOSCFG_KERNEL_SMP == YES)
UINT16 usCpuAffiMask; /**< Task cpu affinity mask */ //任務cpu親和力掩碼
#endif
UINT32 uwResved; /**< It is automatically deleted if set to LOS_TASK_STATUS_DETACHED.
It is unable to be deleted if set to 0. */ //如果設置為LOS_TASK_STATUS_DETACHED,則自動刪除。如果設置為0,則無法刪除
UINT16 consoleID; /**< The console id of task belongs */ //任務的控制臺id所屬
UINT32 processID; //進程ID
UserTaskParam userParam; //在用戶態(tài)運行時棧參數(shù)
} TSK_INIT_PARAM_S;
這些初始化參數(shù)是外露的任務初始參數(shù),pfnTaskEntry對java來說就是你new進程的run(),需要上層使用者提供. 看個例子吧:shell中敲 ping 命令看下它創(chuàng)建的過程
u32_t osShellPing(int argc, const char **argv)
{
int ret;
u32_t i = 0;
u32_t count = 0;
int count_set = 0;
u32_t interval = 1000; /* default ping interval */
u32_t data_len = 48; /* default data length */
ip4_addr_t dst_ipaddr;
TSK_INIT_PARAM_S stPingTask;
// ...省去一些中間代碼
/* start one task if ping forever or ping count greater than 60 */
if (count == 0 || count > LWIP_SHELL_CMD_PING_RETRY_TIMES) {
if (ping_taskid > 0) {
PRINTK("Ping task already running and only support one now\n");
return LOS_NOK;
}
stPingTask.pfnTaskEntry = (TSK_ENTRY_FUNC)ping_cmd;//線程的執(zhí)行函數(shù)
stPingTask.uwStackSize = LOSCFG_BASE_CORE_TSK_DEFAULT_STACK_SIZE;//0x4000 = 16K
stPingTask.pcName = "ping_task";
stPingTask.usTaskPrio = 8; /* higher than shell 優(yōu)先級高于10,屬于內核態(tài)線程*/
stPingTask.uwResved = LOS_TASK_STATUS_DETACHED;
stPingTask.auwArgs[0] = dst_ipaddr.addr; /* network order */
stPingTask.auwArgs[1] = count;
stPingTask.auwArgs[2] = interval;
stPingTask.auwArgs[3] = data_len;
ret = LOS_TaskCreate((UINT32 *)(&ping_taskid), &stPingTask);
}
// ...
return LOS_OK;
ping_error:
lwip_ping_usage();
return LOS_NOK;
}
發(fā)現(xiàn)ping的調度優(yōu)先級是8,比shell 還高,那shell的是多少?答案是:看源碼是 9
LITE_OS_SEC_TEXT_MINOR UINT32 ShellTaskInit(ShellCB *shellCB)
{
CHAR *name = NULL;
TSK_INIT_PARAM_S initParam = {
0};
if (shellCB->consoleID == CONSOLE_SERIAL) {
name = SERIAL_SHELL_TASK_NAME;
} else if (shellCB->consoleID == CONSOLE_TELNET) {
name = TELNET_SHELL_TASK_NAME;
} else {
return LOS_NOK;
}
initParam.pfnTaskEntry = (TSK_ENTRY_FUNC)ShellTask;
initParam.usTaskPrio = 9; /* 9:shell task priority */
initParam.auwArgs[0] = (UINTPTR)shellCB;
initParam.uwStackSize = 0x3000;
initParam.pcName = name;
initParam.uwResved = LOS_TASK_STATUS_DETACHED;
(VOID)LOS_EventInit(&shellCB->shellEvent);
return LOS_TaskCreate(&shellCB->shellTaskHandle, &initParam);
}
關于shell后續(xù)會詳細介紹,請持續(xù)關注。
前置條件了解清楚后,具體看任務是如何一步步創(chuàng)建的,如何和進程綁定,加入調度就緒隊列,還是繼續(xù)看源碼
//創(chuàng)建Task
LITE_OS_SEC_TEXT_INIT UINT32 LOS_TaskCreate(UINT32 *taskID, TSK_INIT_PARAM_S *initParam)
{
UINT32 ret;
UINT32 intSave;
LosTaskCB *taskCB = NULL;
if (initParam == NULL) {
return LOS_ERRNO_TSK_PTR_NULL;
}
if (OS_INT_ACTIVE) {
return LOS_ERRNO_TSK_YIELD_IN_INT;
}
if (initParam->uwResved & OS_TASK_FLAG_IDLEFLAG) {//OS_TASK_FLAG_IDLEFLAG 是屬于內核 idle進程專用的
initParam->processID = OsGetIdleProcessID();//獲取空閑進程
} else if (OsProcessIsUserMode(OsCurrProcessGet())) {//當前進程是否為用戶模式
initParam->processID = OsGetKernelInitProcessID();//不是就取"Kernel"進程
} else {
initParam->processID = OsCurrProcessGet()->processID;//獲取當前進程 ID賦值
}
initParam->uwResved &= ~OS_TASK_FLAG_IDLEFLAG;//不能是 OS_TASK_FLAG_IDLEFLAG
initParam->uwResved &= ~OS_TASK_FLAG_PTHREAD_JOIN;//不能是 OS_TASK_FLAG_PTHREAD_JOIN
if (initParam->uwResved & LOS_TASK_STATUS_DETACHED) {//是否設置了自動刪除
initParam->uwResved = OS_TASK_FLAG_DETACHED;//自動刪除,注意這里是 = ,也就是說只有 OS_TASK_FLAG_DETACHED 一個標簽了
}
ret = LOS_TaskCreateOnly(taskID, initParam);//創(chuàng)建一個任務,這是任務創(chuàng)建的實體,前面都只是前期準備工作
if (ret != LOS_OK) {
return ret;
}
taskCB = OS_TCB_FROM_TID(*taskID);//通過ID拿到task實體
SCHEDULER_LOCK(intSave);
taskCB->taskStatus &= ~OS_TASK_STATUS_INIT;//任務不再是初始化
OS_TASK_SCHED_QUEUE_ENQUEUE(taskCB, 0);//進入調度就緒隊列,新任務是直接進入就緒隊列的
SCHEDULER_UNLOCK(intSave);
/* in case created task not running on this core,
schedule or not depends on other schedulers status. */
LOS_MpSchedule(OS_MP_CPU_ALL);//如果創(chuàng)建的任務沒有在這個核心上運行,是否調度取決于其他調度程序的狀態(tài)。
if (OS_SCHEDULER_ACTIVE) {//當前CPU核處于可調度狀態(tài)
LOS_Schedule();//發(fā)起調度
}
return LOS_OK;
}
對應張大爺?shù)墓适拢壕褪枪?jié)目單要怎么填,按格式來,從哪里開始演,要多大的空間,王場館好協(xié)調好現(xiàn)場的環(huán)境。這里注意在同一個節(jié)目單只要節(jié)目沒演完,王場館申請場地的空間就不能給別人用,這個場地空間對應的就是鴻蒙任務的棧空間,除非整個節(jié)目單都完了,就回收了。把整個場地干干凈凈的留給下一個人的節(jié)目單來表演。
至此的創(chuàng)建已經(jīng)完成,已各就各位,源碼最后還申請了一次LOS_Schedule();因為鴻蒙的調度方式是搶占式的,如何本次task的任務優(yōu)先級高于其他就緒隊列,那么接下來要執(zhí)行的任務就是它了!
編輯:hfy
-
鴻蒙系統(tǒng)
+關注
關注
183文章
2634瀏覽量
66308
發(fā)布評論請先 登錄
相關推薦
【HarmonyOS】鴻蒙內核源碼分析(內存管理篇)
鴻蒙內核源碼分析(源碼注釋篇):給HarmonyOS源碼逐行加上中文注釋
鴻蒙內核源碼分析(必讀篇):用故事說內核
鴻蒙內核源碼分析(調度機制篇):Task是如何被調度執(zhí)行的
鴻蒙內核源碼分析(Task管理篇):task是內核調度的單元
鴻蒙內核源碼分析(Task管理篇):task是內核調度的單元
鴻蒙內核源碼分析(必讀篇)
鴻蒙內核源碼分析:鴻蒙內核的每段匯編代碼解析
鴻蒙內核源碼分析: 虛擬內存和物理內存是怎么管理的





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論