 RGB-D圖像是什么
RGB-D圖像是什么
RGB-D圖像其實是兩幅圖像:
一個是普通的RGB三通道彩色圖像
一個是Depth圖像。
Depth圖像類似于灰度圖像,只是它的每個像素值是傳感器距離物體的實際距離。
通常RGB圖像和Depth圖像是配準的,因而像素點之間具有一對一的對應關系。

RGBD = RGB +Depth Map
RGB
RGB色彩模式是工業界的一種顏色標準,是通過對紅(R)、綠(G)、藍(B)三個顏色通道的變化以及它們相互之間的疊加來得到各式各樣的顏色的,
RGB即是代表紅、綠、藍三個通道的顏色,這個標準幾乎包括了人類視力所能感知的所有顏色,是目前運用最廣的顏色系統之一。
Depth Map
在3D計算機圖形中,Depth Map(深度圖)是包含與視點的場景對象的表面的距離有關的信息的圖像或圖像通道。
其中,Depth Map 類似于灰度圖像,只是它的每個像素值是傳感器距離物體的實際距離。
通常RGB圖像和Depth圖像是配準的,因而像素點之間具有一對一的對應關系。
圖像深度
圖像深度是指存儲每個像素所用的位數,也用于量度圖像的色彩分辨率。
圖像深度確定彩色圖像的每個像素可能有的顏色數,或者確定灰度圖像的每個像素可能有的灰度級數。
它決定了彩色圖像中可出現的最多顏色數,或灰度圖像中的最大灰度等級。
比如一幅單色圖像,若每個像素有8位,則最大灰度數目為2的8次方,即256。
一幅彩色圖像RGB三通道的像素位數分別為4,4,2,則最大顏色數目為2的4+4+2次方,即1024,就是說像素的深度為10位,每個像素可以是1024種顏色中的一種。
例如:
一幅畫的尺寸是1024*768,深度為16,則它的數據量為1.5M。
計算如下:
1024×768×16 bit = (1024×768×16)/8 Byte = [(1024×768×16)/8]/1024 KB = 1536 KB = {[(1024×768×16)/8]/1024}/1024 MB = 1.5 MB
責任編輯:YYX
-
圖像
+關注
關注
2文章
1083瀏覽量
40449 -
RGB
+關注
關注
4文章
798瀏覽量
58461
原文標題:什么是RGB-D圖像?
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
百問FB顯示開發圖像處理 - BMP圖像處理
常見視頻高速接口MIPI,LVDS,RGB,HDMI分析
將YCbCr轉換成RGB565,并丟到顯示RAM中去,為什么顯示的圖像不對?
emWin轉RGB565顏色失真怎么解決?
常用的RGB-D SLAM解決方案

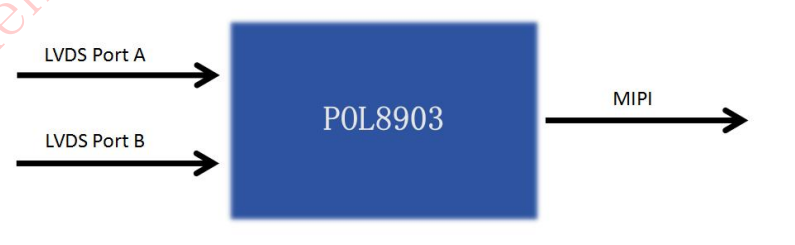
國產芯片POL8903圖像處理芯片-LVDS轉MIPI帶旋轉
ZDP1440系列小技巧—如何配置RGB屏幕參數?

stm32f103zet6驅動ov2640串口發送rgb565格式圖像到串口助手,為什么收不到數據?
移動協作機器人的RGB-D感知的端到端處理方案

【米爾-全志T113-i開發板試用】G2D圖像處理硬件調用和測試
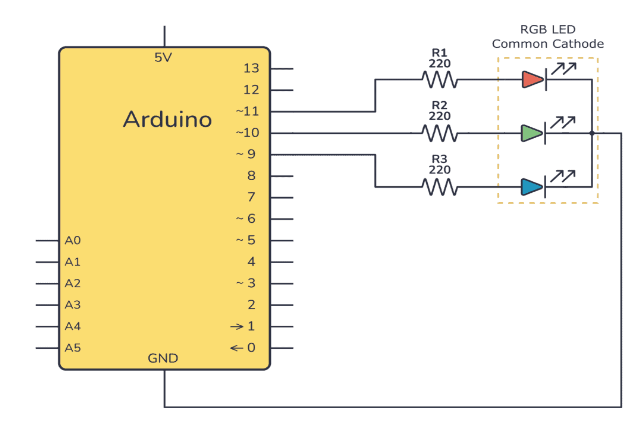
如何使用Arduino控制RGB LED
基于TIC6000的DSP教學實驗箱操作教程:5-18 RGB24圖像灰度轉換(LCD顯示)
兩種應用于3D對象檢測的點云深度學習方法

為什么不能直接對RGB圖做直方圖均衡化

手持RGB-D傳感器廣泛應用的情況





 工商網監
工商網監
評論