 基于STM32單片機的尋跡避障車設計
基于STM32單片機的尋跡避障車設計
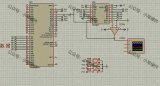
本設計由STM32F103C8T6單片機核心板電路+撥動開關電路+2路按鍵電路+2路紅外對管電路+2路紅外避障模塊電路+L298N電機控制電路組成。
1、通過撥動開關選擇工作模式,即尋跡模式和避障模式。撥動開關撥上,即為尋跡模式;撥動開關撥下,即為避障模式。
2、尋跡模式:啟動按鍵按下后,卸車沿著黑線走(實際用黑膠布模擬)。停止按鍵按下后,小車停止。
3、避障模式:按下啟動按鍵后,小車左側的紅外避障傳感器模塊檢測到有障礙物,則智能車右拐;小車右側的紅外避障傳感器模塊檢測到有障礙物,則智能車左拐。如果小車左右兩側都沒有障礙物,則小車直行。停止按鍵按下后,小車停止。
原文標題:基于STM32單片機的尋跡避障車設計-紅外對管-E18-L298N-(電路圖+程序源碼)
文章出處:【微信公眾號:電路設計技能】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
單片機
+關注
關注
6035文章
44553瀏覽量
634722 -
紅外
+關注
關注
8文章
740瀏覽量
94879 -
STM32
+關注
關注
2270文章
10896瀏覽量
355767
原文標題:基于STM32單片機的尋跡避障車設計-紅外對管-E18-L298N-(電路圖+程序源碼)
文章出處:【微信號:cirmall,微信公眾號:電路設計技能】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
STM32單片機的特點介紹
STM32系列單片機是由ST廠商推出的單片機,基于專為高性能、低成本、低功耗嵌入式應用設計的ARM Cortex-M內核,具備一流的外設配置,使其在功耗和集成度方面表現出色,STM32
stm32單片機用什么軟件編程
STM32單片機是一種廣泛應用于嵌入式系統領域的微控制器,具有高性能、低功耗、豐富的外設接口等特點。要對STM32單片機進行編程,需要選擇合適的軟件工具。 概述
stm32單片機引腳介紹及功能
STM32系列單片機是STMicroelectronics(意法半導體)推出的一款基于ARM Cortex-M內核的32位微控制器。STM32單片機具有高性能、低功耗、豐富的外設和靈活
stm32和51單片機的區別是什么
架構差異: STM32是基于ARM Cortex-M系列內核的32位微控制器,具有更高效的處理能力和更豐富的外設。 51單片機是基于8051內核的8位微控制器,處理能力相對較低,外設也相對有限
機智云開源自動化控制篇-避障式舵機轉向系統
本次采用STM32F103C8T6單片機、ESP-01S模塊、紅外避障模塊、SG90舵機(360°)以及0.96寸的IIC接口OLED顯示屏,基于機智云平臺,完成了

第七章-V1.5 STM32超聲波測距STM32F103C8t6超聲波避障小車 超聲波避障模塊 STM32超聲波測距
5STM32超聲波測距STM32F103C8t6超聲波避障小車

基于STM32單片機的簡易波形發生器設計
系統內使用STM32單片機進行主控,proteus內部集成示波器,使用按鍵可以調節波形的輸出方式,在示波器上可以實時觀察波形的變化。
基于STM32單片機的智能冰箱控制系統設計
基于單片機設計的一款智能冰箱控制系統,可以控制冰箱的制冷裝置,可以采集冰箱的異味濃度,超過閩值之后控制紫外燈進行消毒工作單片機采用單片機采用單片機采用

AGV小車使用避障雷達
AGV(自動導引車)小車使用避障雷達是為了確保其在運行過程中的安全性和穩定性。避障雷達,如激光雷達或超聲波雷達,能夠實時檢測并避免與障礙物發
STM32單片機有哪幾種常見的開發環境?
STM32單片機是一款廣泛應用于嵌入式系統開發的單片機,針對其開發,有以下幾種常見的方式:STM32單片機有哪幾種常見的開發環境?KeilM

STM32單片機最小化系統設計原理
STM32最小系統,就是能讓STM32單片機能夠正常工作所必須擁有的組成部分的集合,也是STM32單片機正常運行的必要環境。
發表于 04-23 14:54
?2806次閱讀
基于STM32單片機的瓦斯監測與控制
本文設計出這一款基于STM32單片機煤礦瓦斯監測控制管理系統,包括甲烷氣體傳感器電路、溫濕度傳感器電路、Wi-Fi模塊電路、報警電路、繼電器控制電路及顯示電路。STM32單片機作為核心
STM32單片機的特點和功能是什么
STM32單片機是一款基于ARM Cortex-M內核的32位閃存微控制器,由STMicroelectronics公司(意法半導體)生產。STM32單片機具有高性能、低功耗、豐富的外設





 工商網監
工商網監
評論