") 基于PC-CAN適配卡和總線技術(shù)實(shí)現(xiàn)潛水電機(jī)分布式監(jiān)控系統(tǒng)的應(yīng)用方案
基于PC-CAN適配卡和總線技術(shù)實(shí)現(xiàn)潛水電機(jī)分布式監(jiān)控系統(tǒng)的應(yīng)用方案
目前,國(guó)內(nèi)外已有多家公司開(kāi)發(fā)出針對(duì)個(gè)體潛水電機(jī)的智能電了保護(hù)裝置,雖然可以達(dá)到保護(hù)電機(jī)的目的,但無(wú)法實(shí)現(xiàn)集中管理。因此,對(duì)潛水電機(jī)群的實(shí)時(shí)監(jiān)控與統(tǒng)一管理的要求日益迫切。本文設(shè)計(jì)了基于CAN現(xiàn)場(chǎng)總線的潛水電機(jī)群分布式智能監(jiān)控系統(tǒng),可以對(duì)散布的潛水電機(jī)保護(hù)裝置進(jìn)行組網(wǎng),實(shí)現(xiàn)潛水電機(jī)的智能化控制和網(wǎng)絡(luò)化管理。
潛水電機(jī)智能監(jiān)控系統(tǒng)總體方案設(shè)計(jì)
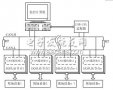
基于CAN現(xiàn)場(chǎng)總線的潛水電機(jī)分布式智能監(jiān)控系統(tǒng)由監(jiān)控計(jì)算機(jī)(內(nèi)置PC-CAN適配卡)、智能節(jié)點(diǎn)、CAN總線網(wǎng)絡(luò)組成,其系統(tǒng)的總體結(jié)構(gòu)如圖1所示。分布在現(xiàn)場(chǎng)的監(jiān)控節(jié)點(diǎn)可以獨(dú)立對(duì)電機(jī)進(jìn)行智能控制和故障保護(hù);監(jiān)控計(jì)算機(jī)可以通過(guò)CAN總線網(wǎng)絡(luò)和各個(gè)監(jiān)控節(jié)點(diǎn)進(jìn)行實(shí)時(shí)通信,從而實(shí)現(xiàn)潛水電機(jī)群的分布式控制和集中臨管。
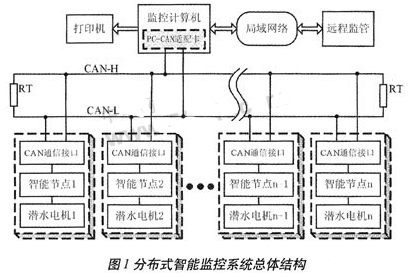
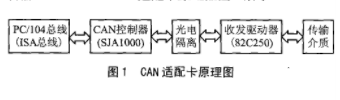
智能節(jié)點(diǎn)是整個(gè)監(jiān)控系統(tǒng)的核心部分,它對(duì)潛水電機(jī)進(jìn)行智能控制,并對(duì)電機(jī)在運(yùn)行過(guò)程中出現(xiàn)的過(guò)載、過(guò)熱、滲水、漏水、短路、缺相等故障進(jìn)行保護(hù)。PC-CAN適配卡用來(lái)完成CAN總線和監(jiān)控計(jì)算機(jī)之間的協(xié)議轉(zhuǎn)換,可以選用PCI總線適配卡、ISA總線適配卡或RS-232串行通信適配器。各個(gè)智能節(jié)點(diǎn)之間通過(guò)屏蔽雙絞線瓦聯(lián)構(gòu)成CAN總線網(wǎng)絡(luò),總線兩端連接120Ω的阻抗匹配電阻,可以提高系統(tǒng)的穩(wěn)定性和抗干擾能力。
監(jiān)控系統(tǒng)的硬件設(shè)計(jì)
由監(jiān)控系統(tǒng)的整體結(jié)構(gòu)和功能可知,該系統(tǒng)的硬件設(shè)計(jì)主要足CAN智能節(jié)點(diǎn)的設(shè)計(jì)。智能節(jié)點(diǎn)硬件電路設(shè)計(jì)采用了模塊化結(jié)構(gòu),由MCU、CAN通信模塊、信號(hào)采集模塊、電機(jī)控制模塊、狀態(tài)顯示模塊、參數(shù)設(shè)置模塊及串行通信接口組成,智能節(jié)點(diǎn)的整體結(jié)構(gòu)如圖2所示。根據(jù)具體情況可以只選用其中的部分模塊,增加了監(jiān)控裝置的實(shí)用性和經(jīng)濟(jì)性。例如:可以去掉顯示模塊和現(xiàn)場(chǎng)設(shè)置模塊,利用監(jiān)控計(jì)算機(jī)實(shí)現(xiàn)數(shù)據(jù)顯示和參數(shù)設(shè)置的功能。在單機(jī)運(yùn)行時(shí),可以不使用CAN通信模塊。
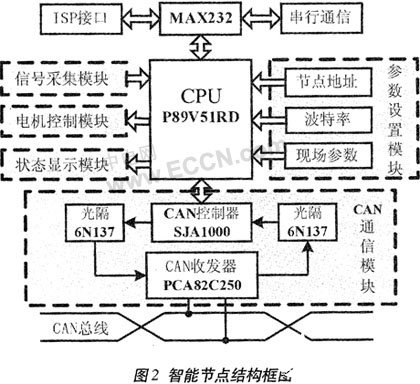
為了簡(jiǎn)化設(shè)計(jì),提高系統(tǒng)的可靠性和性價(jià)比,智能節(jié)點(diǎn)的主要元器件都是選用同一家公司的產(chǎn)品,包括:微控制器(P89V51RD)、CAN控制器(SJA1000)、CAN收發(fā)器(PCA82C250)。P89V51RD內(nèi)帶64kB的Flash存儲(chǔ)器,該存儲(chǔ)器支持ISP功能,ISP的優(yōu)點(diǎn)是支持在系統(tǒng)編程,即不需要移出為控制器,只需要通過(guò)串行接口(RXT和RXD),結(jié)合上位機(jī)軟件就可以實(shí)現(xiàn)PC對(duì)MCU的重復(fù)編程,而且硬件電路連接簡(jiǎn)單,這樣就方便了程序調(diào)試,縮短了設(shè)計(jì)開(kāi)發(fā)周期,提高了系統(tǒng)的穩(wěn)定性。現(xiàn)場(chǎng)智能節(jié)點(diǎn)各個(gè)組成模塊的功能如下:
1.CAN通信模塊:CAN總線通信接口電路主要由CAN控制器SJA1000、6N137高速光隔、CAN收發(fā)器PCA82C250組成。SJA1000完全兼容CAN2.0協(xié)議,用來(lái)完成物理層和數(shù)據(jù)鏈路層的功能,可實(shí)現(xiàn)對(duì)通信數(shù)據(jù)的成幀處理,具有多主結(jié)構(gòu)、總線訪問(wèn)優(yōu)先權(quán)、硬件濾波等特點(diǎn);PCA82C250提供了對(duì)CAN總線差動(dòng)發(fā)送和接收數(shù)據(jù)的功能,有效地提高了總線的抗干擾能力,實(shí)現(xiàn)了保護(hù)總線、降低射頻干擾等功能。為了進(jìn)一步提高整個(gè)系統(tǒng)的可靠性和穩(wěn)定性,在SJA1000和PCA82C250之間增加了光電隔離器件,并且采用了雙電源,有效地抑制由總線引入的干擾。
2.信號(hào)采集模塊:用來(lái)檢測(cè)電機(jī)的運(yùn)行狀態(tài),包括:鉑電阻溫度傳感器、電流互感器、電極式液位傳感器。分別用來(lái)檢測(cè)電機(jī)三相定子的溫度、三相主電流和電機(jī)腔內(nèi)的水位,可以有效地監(jiān)測(cè)潛水電機(jī)的過(guò)流、過(guò)熱、缺相、短路、滲漏等異常現(xiàn)象。信號(hào)采集模塊以12位精度的ADC和多路模擬開(kāi)關(guān)為核心,將傳感器采集到的模擬信號(hào)進(jìn)行調(diào)理后轉(zhuǎn)變?yōu)?a target="_blank">數(shù)字信號(hào)并送入微控制器。MCU得到檢測(cè)信息后做出相應(yīng)的判斷,并送至不同的子程序進(jìn)行相應(yīng)的處理,如:把電機(jī)運(yùn)行的溫度、電流等信息通過(guò)通信程序發(fā)送給監(jiān)控計(jì)算機(jī);若出現(xiàn)電機(jī)內(nèi)腔水位過(guò)低、溫度過(guò)高、電流過(guò)大,則自動(dòng)切斷本節(jié)點(diǎn)的電機(jī)、發(fā)出聲光報(bào)警信息,并把節(jié)點(diǎn)的停機(jī)信息通過(guò)CAN總線發(fā)送給監(jiān)控計(jì)算機(jī)。
3.電機(jī)控制模塊:MCU判斷電機(jī)定子溫度、電流、液位中的任一項(xiàng)值超出設(shè)定值范圍時(shí),都會(huì)通過(guò)SSR(固態(tài)繼電器)觸發(fā)相應(yīng)的異常處理電路,使電機(jī)得到保護(hù)。
4.參數(shù)設(shè)置模塊:報(bào)警電流、報(bào)警溫度、停機(jī)電流、停機(jī)溫度、節(jié)點(diǎn)地址、波特率等信息通過(guò)參數(shù)設(shè)置模塊存儲(chǔ)于基于X25045的E2PROM中,實(shí)現(xiàn)節(jié)點(diǎn)工作參數(shù)現(xiàn)場(chǎng)設(shè)定功能。除了節(jié)點(diǎn)地址外,其它的參數(shù)也可以通過(guò)監(jiān)控計(jì)算機(jī)設(shè)置。
5.狀態(tài)顯示模塊:采用基于I2C總線的顯示技術(shù),通過(guò)LED數(shù)碼管實(shí)時(shí)顯示電機(jī)運(yùn)行過(guò)程中定子的溫度和電流值。并可以在設(shè)置模式下顯示待定參數(shù)的當(dāng)前值。當(dāng)電機(jī)出現(xiàn)非正常停機(jī)時(shí),發(fā)光二極管可以指示出故障的類型,方便檢查維護(hù)。
監(jiān)控節(jié)點(diǎn)的硬件部分除了以上介紹的之外,還有電源電路和看門狗電路。電源電路提供所需隔離電源,用于提高節(jié)點(diǎn)的可靠性和安全性;看門狗電路主要保證系統(tǒng)運(yùn)行的穩(wěn)定性,在上電、掉電以及警戒情況下復(fù)位輸出。
監(jiān)控系統(tǒng)的軟件設(shè)計(jì)
從整個(gè)監(jiān)控系統(tǒng)的角度來(lái)看,該系統(tǒng)的軟件設(shè)計(jì)主要分為兩大部分:即監(jiān)控計(jì)算機(jī)應(yīng)用軟件設(shè)計(jì)和現(xiàn)場(chǎng)智能節(jié)點(diǎn)軟件設(shè)計(jì)。
監(jiān)控計(jì)算機(jī)的軟件設(shè)計(jì)
計(jì)算機(jī)監(jiān)控軟件主要分為用戶應(yīng)用層、數(shù)據(jù)分析處理層及硬件設(shè)備驅(qū)動(dòng)層3個(gè)部分,其軟件設(shè)計(jì)流程如圖3所示。
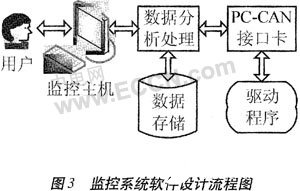
硬件設(shè)備驅(qū)動(dòng)層通過(guò)PC-CAN接口卡建立監(jiān)控計(jì)算與CAN總線的連接,并與智能節(jié)點(diǎn)進(jìn)行數(shù)據(jù)交換;數(shù)據(jù)分析處理層完成CAN總線數(shù)據(jù)的接收、分類、判斷、處理、發(fā)送、存取操作等任務(wù);用戶應(yīng)用層和用戶需求緊密相關(guān),它主要完成的任務(wù)是為用戶提供顯示各類信息的監(jiān)控界面,進(jìn)行人機(jī)交互,也就是通常所說(shuō)的人機(jī)界面(HMI)設(shè)計(jì)。
監(jiān)控節(jié)點(diǎn)的軟件設(shè)計(jì)
潛水電機(jī)的現(xiàn)場(chǎng)控制與數(shù)據(jù)采集都是通過(guò)智能節(jié)點(diǎn)完成的,與節(jié)點(diǎn)的硬件設(shè)計(jì)相一致,智能監(jiān)控節(jié)點(diǎn)的軟件設(shè)計(jì)也遵循模塊化的設(shè)計(jì)原則,使控制軟件具有易讀、易擴(kuò)展和易維護(hù)的優(yōu)點(diǎn)。通過(guò)C51語(yǔ)言編寫相應(yīng)的軟件模塊實(shí)現(xiàn)智能節(jié)點(diǎn)的各種功能。軟件的各功能模塊之間通過(guò)入口和出口參數(shù)相互聯(lián)系,組合靈活方便,減少了調(diào)試時(shí)間,縮短了開(kāi)發(fā)周期。
監(jiān)控節(jié)點(diǎn)通信程序設(shè)計(jì)
智能監(jiān)控節(jié)點(diǎn)的通信采用CAN總線2.0A協(xié)議,通信模塊的軟件設(shè)計(jì)主要由初始化子程序、報(bào)文接收子程序、報(bào)文發(fā)送子程序3部分組成。其中初始化子程序是實(shí)現(xiàn)通信的關(guān)鍵,它主要用來(lái)完成CAN控制器工作方式的選擇,即對(duì)系統(tǒng)中的CAN控制器控制段中的寄存器進(jìn)行設(shè)置。初始化過(guò)程是在CAN控制器復(fù)位模式下完成的。
智能節(jié)點(diǎn)與監(jiān)控計(jì)算機(jī)之間的數(shù)據(jù)交換是通過(guò)發(fā)送程序和接收程序?qū)崿F(xiàn)的。報(bào)文發(fā)送時(shí)只需將電機(jī)的狀態(tài)數(shù)據(jù)送入SJA1000的發(fā)送緩沖區(qū)中,然后啟動(dòng)發(fā)送請(qǐng)求。監(jiān)控節(jié)點(diǎn)采用定時(shí)中斷的方式主動(dòng)向監(jiān)控計(jì)算機(jī)發(fā)送數(shù)據(jù)。這是利用了CAN總線可以采用多主機(jī)方式通信的特點(diǎn)。由于實(shí)時(shí)監(jiān)控功能由各個(gè)控制節(jié)點(diǎn)完成,而監(jiān)控計(jì)算機(jī)主要起到管理作用,所以采用了定時(shí)上傳數(shù)據(jù)的方法,而沒(méi)有實(shí)時(shí)上傳所有傳感器采集到的數(shù)據(jù),從而減輕了總線負(fù)擔(dān)。一個(gè)正在等待的報(bào)文會(huì)從存儲(chǔ)器復(fù)制到發(fā)送緩沖器后,置位命令寄存器TR標(biāo)志產(chǎn)生發(fā)送請(qǐng)求,發(fā)送過(guò)程由SJA1000獨(dú)立完成。基于SJA1000的報(bào)文接收有兩種方式:中斷方式和查詢方式。為了保證接收?qǐng)?bào)文的準(zhǔn)確性,選擇實(shí)時(shí)性較高的中斷方式。在中斷方式下,如果SJA1000已接收一個(gè)報(bào)文,并且報(bào)文已通過(guò)驗(yàn)收濾波器并放入接收FIFO,那么會(huì)產(chǎn)生一個(gè)接收中斷,通知微處理器有報(bào)文已經(jīng)接收。接收緩沖區(qū)用來(lái)存放CAN總線上發(fā)來(lái)的數(shù)據(jù),MCU讀取數(shù)據(jù)后,接收緩沖區(qū)將被清空,等待接收新的數(shù)據(jù)。
結(jié)語(yǔ)
本文采用CAN現(xiàn)場(chǎng)總線設(shè)計(jì)的潛水電機(jī)分布式智能監(jiān)控系統(tǒng)具有抗干擾能力強(qiáng)、網(wǎng)絡(luò)化管理程度高、人機(jī)界面友好等特點(diǎn)。開(kāi)發(fā)過(guò)程中所提出的技術(shù)方案和實(shí)現(xiàn)方法可以在類似的工業(yè)底層監(jiān)控網(wǎng)絡(luò)系統(tǒng)及分布式監(jiān)控系統(tǒng)的設(shè)計(jì)中推廣應(yīng)用。
責(zé)任編輯:gt
-
CAN總線
+關(guān)注
關(guān)注
145文章
1950瀏覽量
130731 -
計(jì)算機(jī)
+關(guān)注
關(guān)注
19文章
7488瀏覽量
87855 -
監(jiān)控系統(tǒng)
+關(guān)注
關(guān)注
21文章
3906瀏覽量
174446
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于VxWorks操作系統(tǒng)實(shí)現(xiàn)PC/104-CAN適配卡的驅(qū)動(dòng)系統(tǒng)設(shè)計(jì)
求一種CAN適配卡驅(qū)動(dòng)程序的設(shè)計(jì)方案
如何利用VxWorks操作系統(tǒng)實(shí)現(xiàn)PC/104-CAN適配卡的驅(qū)動(dòng)系統(tǒng)設(shè)計(jì)
求一種基于CAN總線、GPIB總線和以太網(wǎng)的分布式電機(jī)驅(qū)動(dòng)測(cè)試系統(tǒng)
CAN總線分布式系統(tǒng)適配卡和控制單元設(shè)計(jì)
基于CAN 總線的分布式潛水電機(jī)監(jiān)控系統(tǒng)
基于CAN總線的分布式監(jiān)控系統(tǒng)智能節(jié)點(diǎn)設(shè)計(jì)
基于USB的CAN適配卡的設(shè)計(jì)與實(shí)現(xiàn)
CAN總線在車輛分布式控制系統(tǒng)中的應(yīng)用
基于WinCE環(huán)境的CAN適配卡驅(qū)動(dòng)程序的設(shè)計(jì)與實(shí)現(xiàn)
發(fā)電機(jī)狀態(tài)監(jiān)測(cè)儀中CAN適配卡的設(shè)計(jì)方案
CAN總線實(shí)現(xiàn)工業(yè)網(wǎng)絡(luò)分布式測(cè)控系統(tǒng)
CANopen協(xié)議在分布式控制系統(tǒng)中的應(yīng)用研究
基于WinCE環(huán)境的CAN適配卡驅(qū)動(dòng)程序的設(shè)計(jì)與實(shí)現(xiàn)
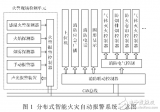
基于CAN總線的分布式船舶火災(zāi)自動(dòng)監(jiān)控系統(tǒng)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論