

導(dǎo)讀
本文是一篇多目標跟蹤方向的調(diào)研報告,從相關(guān)方向、核心步驟、評價指標和最新進展等維度出發(fā),對MOT進行了全面的介紹,不僅適合作為入門科普,而且能夠幫助大家加深理解。
最近做了一些多目標跟蹤方向的調(diào)研,因此把調(diào)研的結(jié)果以圖片加文字的形式展現(xiàn)出來,希望能幫助到入門這一領(lǐng)域的同學(xué)。也歡迎大家和我討論關(guān)于這一領(lǐng)域的任何問題。
相關(guān)方向
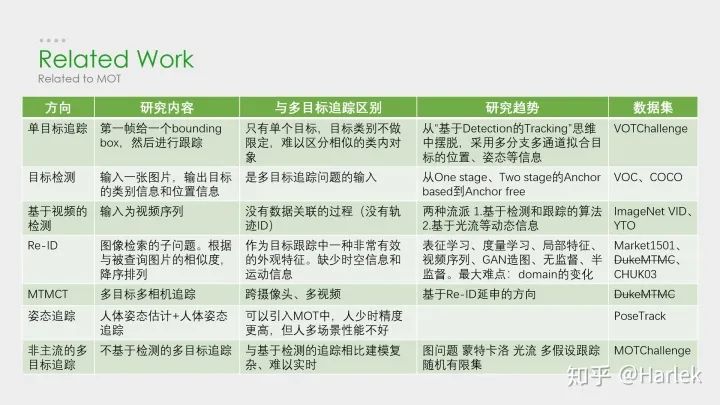
這些是我所了解的多目標跟蹤(MOT)的一些相關(guān)方向。其中單目標跟蹤(VOT/SOT)、目標檢測(detection)、行人重識別(Re-ID)都是非常熱門的方向。而偏視頻的相關(guān)方向就比較冷門。而且今年五月DukeMTMC因為隱私問題不再提供MTMCT的數(shù)據(jù)了,MTMCT的研究也是舉步維艱。
核心步驟
MOT算法的通常工作流程:(1)給定視頻的原始幀;(2)運行對象檢測器以獲得對象的邊界框;(3)對于每個檢測到的物體,計算出不同的特征,通常是視覺和運動特征;(4)之后,相似度計算步驟計算兩個對象屬于同一目標的概率;(5)最后,關(guān)聯(lián)步驟為每個對象分配數(shù)字ID。
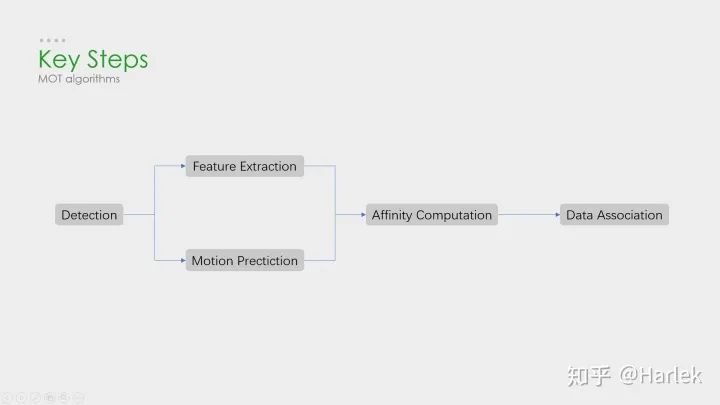
因此絕大多數(shù)MOT算法無外乎就這四個步驟:①檢測 ②特征提取、運動預(yù)測 ③相似度計算 ④數(shù)據(jù)關(guān)聯(lián)。 其中影響最大的部分在于檢測,檢測結(jié)果的好壞對于最后指標的影響是最大的。 但是,多目標追蹤的研究重點又在相似度計算和數(shù)據(jù)關(guān)聯(lián)這一塊。所以就有一個很大的問題:你設(shè)計出更好的關(guān)聯(lián)算法可能就提升了0.1個點,但別人用一些針對數(shù)據(jù)集的trick消除了一些漏檢可能就能漲好幾個點。所以研究更好的數(shù)據(jù)關(guān)聯(lián)的回報收益很低。因此多目標追蹤這一領(lǐng)域雖然工業(yè)界很有用,但學(xué)術(shù)界里因為指標數(shù)據(jù)集的一些原因,入坑前一定要三思。
評價指標
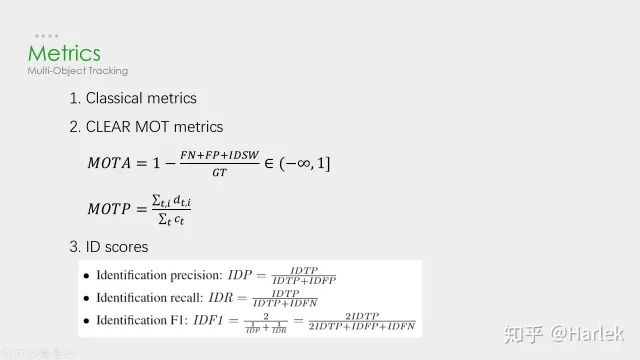
關(guān)于評價指標: 第一個是傳統(tǒng)的標準,現(xiàn)在已經(jīng)沒人用了,就不介紹了。 第二個是06年提出的CLEAR MOT。現(xiàn)在用的最多的就是MOTA。但是這個指標FN、FP的權(quán)重占比很大,更多衡量的是檢測的質(zhì)量,而不是跟蹤的效果。 第三個是16年提出的ID scores。因為都是基于匹配的指標,所以能更好的衡量數(shù)據(jù)關(guān)聯(lián)的好壞。
數(shù)據(jù)集
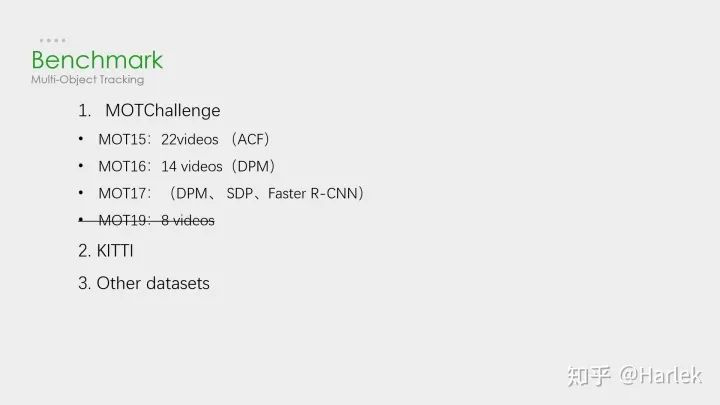
數(shù)據(jù)集用的最多的是MOTChallenge,專注于行人追蹤的。 第二個KITTI的是針對自動駕駛的數(shù)據(jù)集,有汽車也有行人,在MOT的論文里用的很少。 還有一些其他比較老的數(shù)據(jù)集現(xiàn)在都不用了。 15年的都是采集的老的數(shù)據(jù)集的視頻做的修正。 16年的是全新的數(shù)據(jù)集,相比于15年的行人密度更高、難度更大。特別注意這個DPM檢測器,效果非常的差,全是漏檢和誤檢。 17年的視頻和16年一模一樣,只是提供了三個檢測器,相對來說更公平。也是現(xiàn)在論文的主流數(shù)據(jù)集。 19年的是針對特別擁擠情形的數(shù)據(jù)集,只有CVPR19比賽時才能提交。
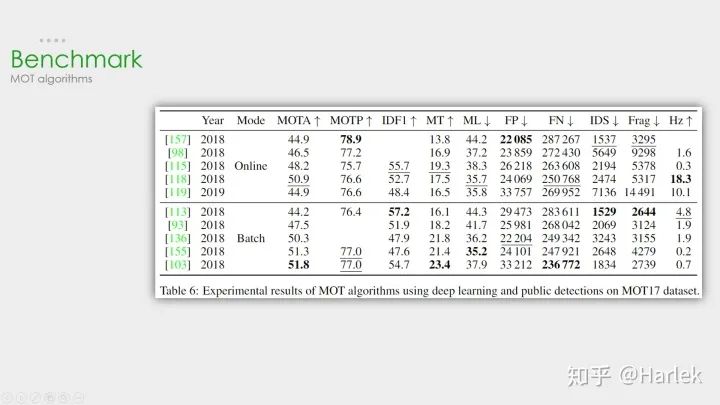
這個是MOT16公開檢測器上的結(jié)果。可以看到從17年開始,MOTA就漲的很慢了。關(guān)注一下這個幀率有20Hz的算法MOTDT也是我后面要講的一個。
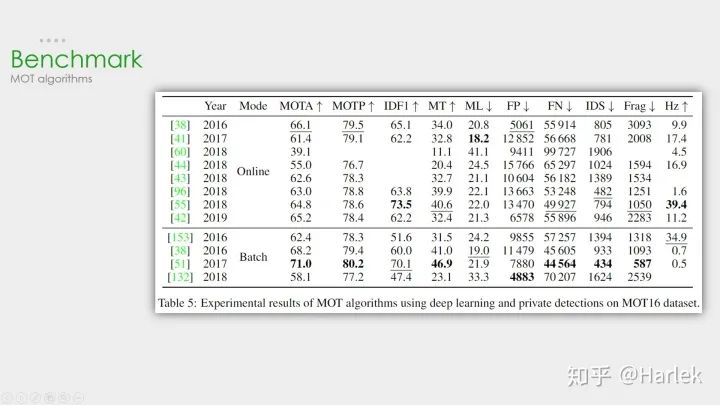
這個是MOT16私有檢測器上的結(jié)果。可以看到檢測器性能的好壞對于結(jié)果的影響非常重要。SOTA算法換了私有檢測器后性能直接漲了快20個點。
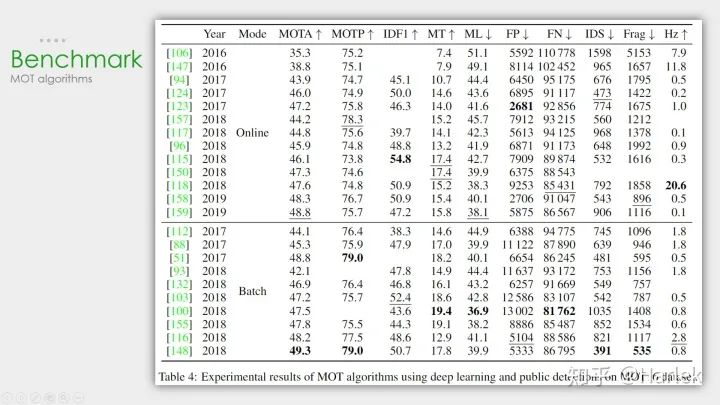
這個是MOT17公開檢測器上這幾年比較突出的算法。注意因為這個數(shù)據(jù)集用了三個檢測器,所以FP、FN這些指標也都幾乎是16數(shù)據(jù)集的三倍。
SORT和DeepSORT
關(guān)鍵算法
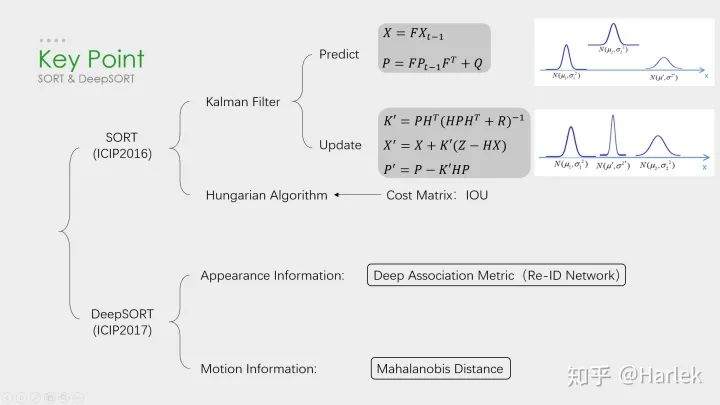
從這兩個工業(yè)界關(guān)注度最高的算法說起。 SORT作為一個粗略的框架,核心就是兩個算法:卡爾曼濾波和匈牙利匹配。卡爾曼濾波分為兩個過程:預(yù)測和更新。預(yù)測過程:當(dāng)一個小車經(jīng)過移動后,且其初始定位和移動過程都是高斯分布時,則最終估計位置分布會更分散,即更不準確;更新過程:當(dāng)一個小車經(jīng)過傳感器觀測定位,且其初始定位和觀測都是高斯分布時,則觀測后的位置分布會更集中,即更準確。匈牙利算法解決的是一個分配問題。SK-learn庫的linear_assignment___和scipy庫的linear_sum_assignment都實現(xiàn)了這一算法,只需要輸入cost_matrix即代價矩陣就能得到最優(yōu)匹配。
不過要注意的是這兩個庫函數(shù)雖然算法一樣,但給的輸出格式不同。具體算法步驟也很簡單,是一個復(fù)雜度的算法。 DeepSORT的優(yōu)化主要就是基于匈牙利算法里的這個代價矩陣。它在IOU Match之前做了一次額外的級聯(lián)匹配,利用了外觀特征和馬氏距離。外觀特征就是通過一個Re-ID的網(wǎng)絡(luò)提取的,而提取這個特征的過程和NLP里詞向量的嵌入過程(embedding)很像,所以后面有的論文也把這個步驟叫做嵌入(起源應(yīng)該不是NLP,但我第一次接觸embedding是從NLP里)。然后是因為歐氏距離忽略空間域分布的計算結(jié)果,所以增加里馬氏距離作為運動信息的約束。
SORT
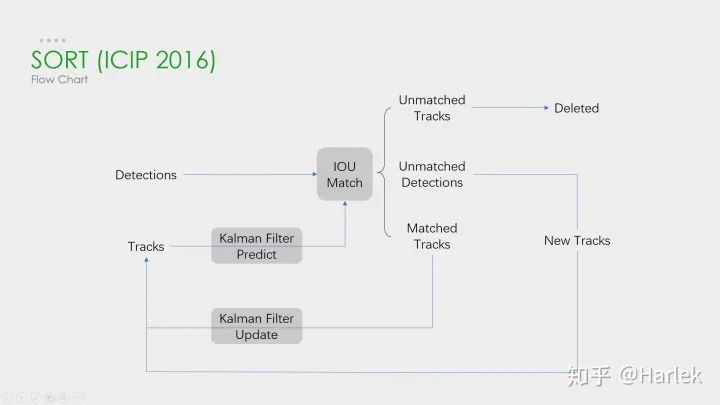
這個SORT的流程圖非常重要,可以看到整體可以拆分為兩個部分,分別是匹配過程和卡爾曼預(yù)測加更新過程,都用灰色框標出來了。一定要把整個流程弄明白。后面的多目標追蹤的大框架基本都由此而來。 關(guān)鍵步驟:軌跡卡爾曼濾波預(yù)測→ 使用匈牙利算法將預(yù)測后的tracks和當(dāng)前幀中的detecions進行匹配(IOU匹配) → 卡爾曼濾波更新對于沒有匹配上的軌跡,也不是馬上就刪掉了,有個T_lost的保存時間,但SORT里把這個時間閾值設(shè)置的是1,也就是說對于沒匹配上的軌跡相當(dāng)于直接刪了。 關(guān)于這點論文里的原話是:
首先,恒定速度模型不能很好地預(yù)測真實的動力學(xué),其次,我們主要關(guān)注的是幀到幀的跟蹤,其中對象的重新識別超出了本文的范圍。
這篇文章的機翻在《SORT》論文翻譯
DeepSORT
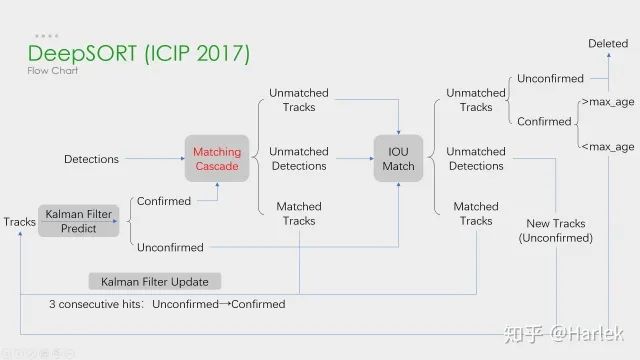
這是DeepSORT算法的流程圖,和SORT基本一樣,就多了級聯(lián)匹配(Matching Cascade)和新軌跡的確認(confirmed)。 這篇文章的機翻在《DeepSORT》論文翻譯 關(guān)鍵步驟:軌跡卡爾曼濾波預(yù)測→ 使用匈牙利算法將預(yù)測后的tracks和當(dāng)前幀中的detecions進行匹配(級聯(lián)匹配和IOU匹配) → 卡爾曼濾波更新級聯(lián)匹配是核心,就是紅色部分,DeepSORT的絕大多數(shù)創(chuàng)新點都在這里面,具體過程看下一張圖。 關(guān)于為什么新軌跡要連續(xù)三幀命中才確認?個人認為有這樣嚴格的條件和測試集有關(guān)系。因為測試集給的檢測輸入非常的差,誤檢有很多,因此軌跡的產(chǎn)生必須要更嚴格的條件。
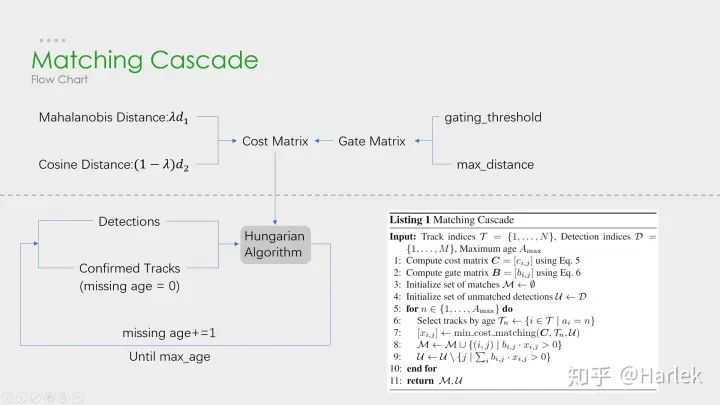
級聯(lián)匹配流程圖里上半部分就是特征提取和相似度估計,也就是算這個分配問題的代價函數(shù)。主要由兩部分組成:代表運動模型的馬氏距離和代表外觀模型的Re-ID特征。 級聯(lián)匹配流程圖里下半部分數(shù)據(jù)關(guān)聯(lián)作為流程的主體。為什么叫級聯(lián)匹配,主要是它的匹配過程是一個循環(huán)。從missing age=0的軌跡(即每一幀都匹配上,沒有丟失過的)到missing age=30的軌跡(即丟失軌跡的最大時間30幀)挨個的和檢測結(jié)果進行匹配。也就是說,對于沒有丟失過的軌跡賦予優(yōu)先匹配的權(quán)利,而丟失的最久的軌跡最后匹配。 論文關(guān)于參數(shù)λ(運動模型的代價占比)的取值是這么說的:
在我們的實驗中,我們發(fā)現(xiàn)當(dāng)相機運動明顯時,將λ= 0設(shè)置是一個合理的選擇。
因為相機抖動明顯,卡爾曼預(yù)測所基于的勻速運動模型并不work,所以馬氏距離其實并沒有什么作用。但注意也不是完全沒用了,主要是通過閾值矩陣(Gate Matrix)對代價矩陣(Cost Matrix)做了一次閾值限制。 關(guān)于DeepSORT算法的詳細代碼解讀我比較推薦:目標跟蹤初探(DeepSORT) 但關(guān)于卡爾曼濾波的公式講的不是很詳細,具體推導(dǎo)可以看看 Kalman Filter 卡爾曼濾波
改進策略
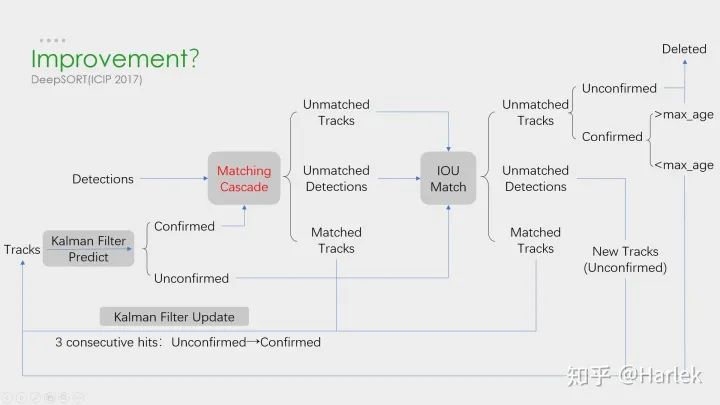
看到這個DeepSORT的流程圖不知道大家可以想到什么優(yōu)化的地方?其實有幾個點是很容易想到的。
第一點,把Re-ID網(wǎng)絡(luò)和檢測網(wǎng)絡(luò)融合,做一個精度和速度的trade off; 第二點,對于軌跡段來說,時間越長的軌跡是不是更應(yīng)該得到更多的信任,不僅僅只是級聯(lián)匹配的優(yōu)先級,由此可以引入軌跡評分的機制; 第三點,從直覺上來說,檢測和追蹤是兩個相輔相成的問題,良好的追蹤可以彌補檢測的漏檢,良好的檢測可以防止追蹤的軌道飄逸,用預(yù)測來彌補漏檢這個問題在DeepSORT里也并沒有考慮; 第四點,DeepSORT里給馬氏距離也就是運動模型設(shè)置的系數(shù)為0,也就是說在相機運動的情況下線性速度模型并不work,所以是不是可以找到更好的運動模型。
最新進展

這是最近比較新的一些方法。 工業(yè)界青睞的算法在學(xué)術(shù)界其實并不重視,一方面是因為開源的原因,另一方面可以看到頂會的算法都不是注重速度的,通常用了很復(fù)雜的模塊和trick來提升精度。 而且這些trick不是一般意義的trick了,是針對這個數(shù)據(jù)集的或者說針對糟糕檢測器的一些trick, 對于實際應(yīng)用幾乎沒有幫助。 第一篇論文是基于DeepSORT改進的,它的創(chuàng)新點在于引入了軌跡評分機制,時間越久的軌跡可信度就越高,基于這個評分就可以把軌跡產(chǎn)生的預(yù)測框和檢測框放一起做一個NMS,相當(dāng)于是用預(yù)測彌補了漏檢。 第二篇論文是今年9月份發(fā)在arxiv上的一篇論文,它的工作是把檢測網(wǎng)絡(luò)和嵌入網(wǎng)絡(luò)結(jié)合起來,追求的是速度和精度的trade off。
MOTDT
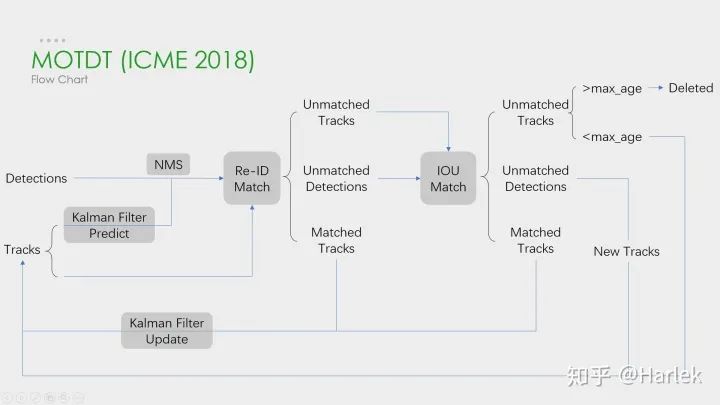
這是剛才列舉的第一篇論文(MOTDT)的流程圖,大概和DeepSORT差不多。這個圖畫的比較簡單,其實在NMS之前有個基于SqueezeNet的區(qū)域選擇網(wǎng)絡(luò)R-FCN和軌跡評分的機制。這兩個東西的目的就是為了產(chǎn)生一個統(tǒng)一檢測框和預(yù)測框的標準置信度,作為NMS的輸入。 這篇文章的翻譯在《Real-Time Multiple People Tracking With Deeply Learned Candidate Selection And Person Re-ID》論文翻譯
JDE
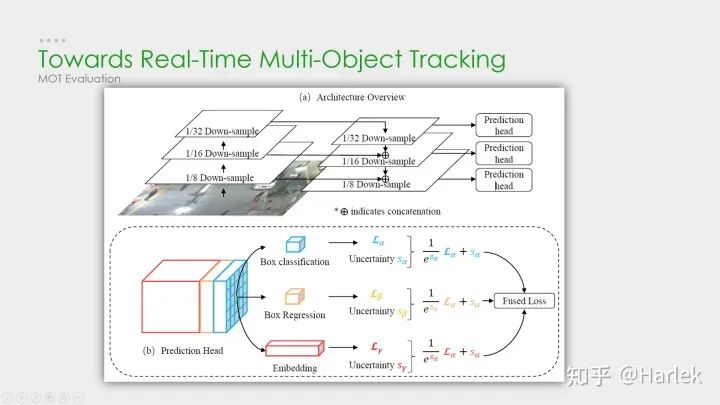
這是剛才第二篇論文(JDE)里的結(jié)構(gòu)圖。這個方法是基于YOLOv3和MOTDT做的。它網(wǎng)絡(luò)前面都和YOLOv3一樣的,主要就是在特征圖里多提取了一個嵌入(embedding)向量,采取的是類似于交叉熵的triplet loss。因為是多任務(wù)學(xué)習(xí),這篇論文還用了一篇18年的論文提出來的自動學(xué)習(xí)損失權(quán)重方案:通過學(xué)習(xí)一組輔助參數(shù)自動地對非均勻損失進行加權(quán)。最后的結(jié)果是精度上差不太多,F(xiàn)PS高了很多。 這篇文章的翻譯在 《Towards Real-Time Multi-Object Tracking》論文翻譯
未來展望
最后用多目標追蹤未來的一些思考作為結(jié)尾,這句話是最近的一篇關(guān)于多目標追蹤的綜述里的。 它在最后提出對未來的方向里有這樣一句話,用深度學(xué)習(xí)來指導(dǎo)關(guān)聯(lián)問題。其實現(xiàn)在基于檢測的多目標追蹤都是檢測模塊用深度學(xué)習(xí),Re-ID模塊用深度學(xué)習(xí),而最核心的數(shù)據(jù)關(guān)聯(lián)模塊要用深度學(xué)習(xí)來解決是很困難的。現(xiàn)在有一些嘗試是用RNN,但速度慢、效果不好,需要走的路都還很長。 我個人覺得短期內(nèi)要解決實際問題,還是從Re-ID的方面下手思考怎樣提取更有效的特征會更靠譜,用深度學(xué)習(xí)的方法來處理數(shù)據(jù)關(guān)聯(lián)不是短時間能解決的。
參考文獻:[1] Alex Bewley, Zongyuan Ge, Lionel Ott, Fabio Ramos, and Ben Upcroft. Simple online and realtime tracking. In2016 IEEE International Conference on Image Processing (ICIP), pages 3464–3468. IEEE, 2016. [2] Nicolai Wojke, Alex Bewley, and Dietrich Paulus. Simple online and realtime tracking with a deep associationmetric. In2017 IEEE International Conference on Image Processing (ICIP), pages 3645–3649. IEEE, 2017. [3] Chen Long, Ai Haizhou, Zhuang Zijie, and Shang Chong. Real-time multiple people tracking with deeplylearned candidate selection and person re-identification. InICME, 2018. [4] Zhongdao Wang, Liang Zheng, Yixuan Liu, Shengjin Wang. Towards Real-Time Multi-Object Tracking. arXiv preprint arXiv:1909.12605 [5] Gioele Ciaparrone, Francisco Luque Sánchez, Siham Tabik, Luigi Troiano, Roberto Tagliaferri, Francisco Herrera. Deep Learning in Video Multi-Object Tracking: A Survey. arXiv preprint arXiv:1907.12740
責(zé)任編輯:xj
原文標題:基于深度學(xué)習(xí)的多目標跟蹤(MOT)技術(shù)一覽
文章出處:【微信公眾號:新機器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
-
算法
+關(guān)注
關(guān)注
23文章
4701瀏覽量
94856 -
目標跟蹤
+關(guān)注
關(guān)注
2文章
88瀏覽量
15053 -
深度學(xué)習(xí)
+關(guān)注
關(guān)注
73文章
5555瀏覽量
122538
原文標題:基于深度學(xué)習(xí)的多目標跟蹤(MOT)技術(shù)一覽
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
分時電價下光伏園區(qū)電動汽車有序充電多目標優(yōu)化策略
使用RTSP攝像頭執(zhí)行多攝像頭多目標Python演示,缺少輸出幀是怎么回事?
淺談多目標優(yōu)化約束條件下充電設(shè)施有序充電控制策略
視頻目標跟蹤從0到1,概念與方法

NPU在深度學(xué)習(xí)中的應(yīng)用
使用STT全面提升自動駕駛中的多目標跟蹤






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論