") 機器視覺工業(yè)鏡頭參數(shù)的介紹
機器視覺工業(yè)鏡頭參數(shù)的介紹
機器視覺系統(tǒng)中,鏡頭作為機器的眼睛,其主要作用是將目標(biāo)物體的圖像聚焦在圖像傳感器(相機)的光敏器件上。數(shù)據(jù)系統(tǒng)所處理的所有圖像信息均需要通過鏡頭得到,鏡頭的質(zhì)量直接影響到視覺系統(tǒng)的整體性能。
這一期鏡頭學(xué)堂將對機器視覺工業(yè)鏡頭相關(guān)參數(shù)做簡要介紹:
01
焦距(EFL)
定義
透鏡中心到像方焦點的距離。
光學(xué)系統(tǒng)中的焦距用來衡量光學(xué)系統(tǒng)匯聚或發(fā)散光線的能力。
焦距示意圖
該如何理解焦距與視場角的關(guān)系呢?
對于相同的感光元件,搭配的鏡頭焦距越長,視場角越小,反之成立(排除枕形畸變的影響)。
可以根據(jù)下面這組圖片來直觀的感受一下
注:使用同款感光芯片
02
光圈數(shù)(F.No)
定義
焦距(EFL)與入瞳(D,光圈在物方空間的像)的比值,即F.No=EFL/D。
F.No數(shù)的大小是如何對畫面亮度、景深及裝配靈敏度產(chǎn)生影響的呢?
a.畫面亮度
F.No數(shù)的大小決定進(jìn)入光學(xué)系統(tǒng)能量的多少。
F.No越大,進(jìn)入光學(xué)系統(tǒng)的光線越少,畫面越暗;F.No越小,進(jìn)入光學(xué)系統(tǒng)的光線越多,畫面越亮。
如下圖所示:
注:此項默認(rèn)相機曝光時間、增益等參數(shù)恒定。
b.景深
在其它所有參數(shù)保持一致的前提下,F(xiàn).No越大,景深越大;F.No越小,景深越小。
c.裝配靈敏度
F.No越大,圖像對安裝傾斜的靈敏度低,越易于裝配;F.No越小,圖像對安裝傾斜的靈敏度高,越不易于裝配。
03
定義
光學(xué)系統(tǒng)中,由于光學(xué)透鏡固有的透視失真導(dǎo)致實際成像相對于被攝物體的失真程度。
光學(xué)畸變
OP
Distortion
光學(xué)畸變指的是物體經(jīng)過光學(xué)系統(tǒng)所成的像對于物體本身而言的失真程度。
光學(xué)畸變計算方法:
OP.Dist(%)=(實際像高-理想像高)/理想像高× 100%
TV 畸變
TV
Distortion
TV畸變指的是實際拍攝圖像時,像的變形程度。
TV畸變計算方法:
TV.Dist(%)=(H1 - H2)/H
TV畸變可分為枕形畸變和桶形畸變,對角線向外延長的變形(畸變值為正)稱作枕形畸變,反之,對角線向內(nèi)縮短的變形(畸變值為負(fù)負(fù))稱作桶形畸變。
04
視場角(Field of View)
定義
鏡頭在感光元器件上所能看到的空間角度范圍,即光學(xué)系統(tǒng)入瞳中心對物的張角或出瞳中心對像的張角。
視場角與焦距(EFL)的關(guān)系:
若Y為Sensor的半對角線長度,在不考慮光學(xué)系統(tǒng)畸變的前提下,對角線視場角(2θ)=2*arctan(Y/EFL),如下圖所示:
注:視場角與鏡頭焦距、Sensor靶面大小和鏡頭畸變有關(guān):
a.鏡頭焦距相同的情況下,Sensor靶面越大,視場角越大;
b.Sensor靶面相同的情況下,鏡頭焦距越小,視場角越大;
c. 鏡頭焦距和Sensor靶面都相同的情況下,枕形(負(fù))畸變越大,視場角越大。
05
清晰度(Resolution)
定義
分辨率和反差綜合表現(xiàn)的結(jié)果。
分辨率又稱分辨力、解析力、鑒別率、解析度,指的是鏡頭清晰的再現(xiàn)被攝景物細(xì)節(jié)的能力,分辨率越高的鏡頭,拍攝的圖像越清晰細(xì)膩。
清晰度也可以用像面上鏡頭在單位MM內(nèi)能夠分辨的線對數(shù)表示,單位是LP/MM,能夠分辨的線對數(shù)越多,代表鏡頭分辨率越高。如下圖所示:
反差即對比度,用來形容圖像最亮處和最暗處的差別;用MTF(ModulationTransfer Function調(diào)制傳遞函數(shù))來表示,MTF描述的是光學(xué)成像系統(tǒng)對各頻率分量對比度的傳遞特性,如下式所示:
其中I’max和I’min表示像的最大和最小灰度值,Imax和Imin表示物的最大和最小灰度值。
很明顯,調(diào)制度介于0和1之間,調(diào)制度M越高,意味著反差越大;當(dāng)圖像中的最大亮度和最小亮度相等,反差完全消失,此時調(diào)制度為0。
下圖為分辨率為10LP/MM,MTF在0.05~0.4之間的對比圖片,從下圖可以看出,人眼可接受的最小可分辨的MTF數(shù)值在0.15~0.2之間。
MTF如何影響到鏡頭的整體成像效果?
低頻率時的MTF值決定了圖像的對比度,高頻率時的MTF值決定了圖像的分辨力,MTF的優(yōu)劣直接影響到鏡頭的整體成像效果,如下圖:
A曲線: 曲線平滑下降,說明圖像的解像力和對比度均達(dá)到了較好的水平,見A圖;
B曲線: 低頻率時的MTF值持續(xù)很高,說明圖像的對比度很好;但是高頻率時的MTF很低,說明圖像的解像力較差,見B圖;
C曲線: 低頻率時的MTF值下降較快,說明圖像對比度較差;高頻時的MTF較B曲線高,說明圖像解像力效果比B好,見C圖;
06
相對照度(Relative Illumination)
定義
圖像邊緣亮度與中心亮度的比值。Sensor表面不同位置的照度的大小與該處入射于像面的光線入射角的Cosin四次方成正比。
相對照度<1??
相對照度<1的原因:中心視場與邊緣視場的有效通光孔徑不同(如左圖),造成中心與邊緣的亮度差異。
07
景深(Depth of Field)
定義
能夠在像平面上呈現(xiàn)清晰的像的物方空間深度范圍。
那么景深是如何計算的?又和哪些因素有關(guān)呢?
可成清晰像的最遠(yuǎn)的物平面稱為遠(yuǎn)景平面,它與對準(zhǔn)平面的距離成為后景深△L1;能成清晰像的最近物平面稱為近景平面,它與對準(zhǔn)平面的距離稱為前景深△L2;景深=前景深+后景深,如下圖所示:
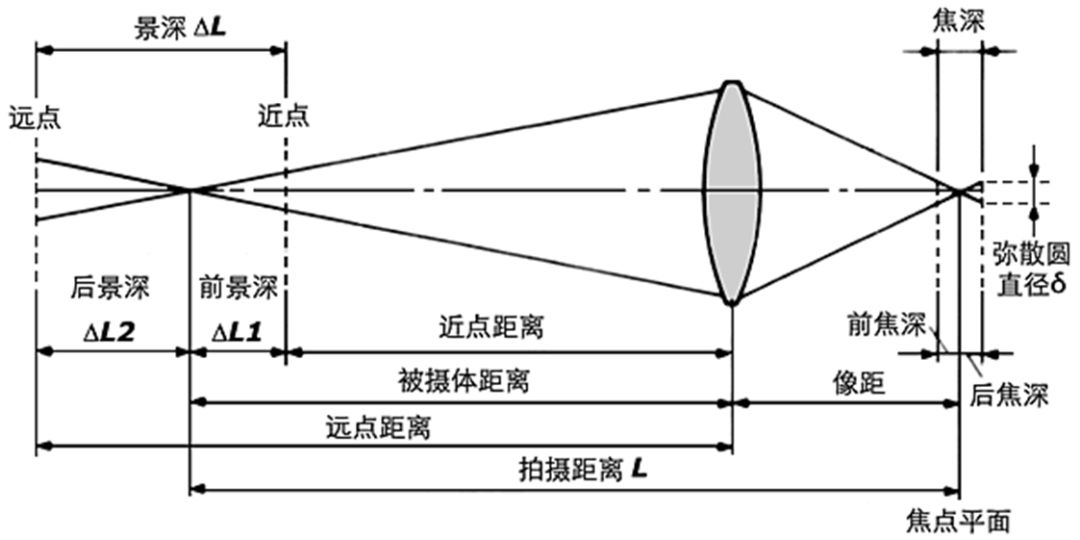
前景深 ΔL1= FδL2/ (f2 + FδL)
后景深 ΔL2= FδL2/ (f2 - FδL)
景深 ΔL =ΔL1+ΔL2=2f2FδL2/( f 4- F2δ2L2)
δ——容許彌散圓直徑
f——鏡頭焦距
F——鏡頭的拍攝光圈值
L——對焦距離
ΔL1—— 前景深
ΔL2——后景深
ΔL——景深
由景深計算公式可以看出,景深與鏡頭使用的F.No 、 f焦距、拍攝距離以及對圖像質(zhì)量的要求(表現(xiàn)為容許彌散圓的大小)有關(guān)。
這些主要因素對景深的影響如下(假定其他的條件都不改變):
a.鏡頭光圈:
光圈越大,景深越小;光圈越小,景深越大;
b. 鏡頭焦距:
鏡頭焦距越長,景深越小;焦距越短,景深越大;
c. 拍攝距離:
距離越遠(yuǎn),景深越大;距離越近,景深越小。
08
放大倍率(Magnification)
定義
像高和物高的大小之比。
放大倍率的計算方法:

09
靶面大小(Max Image Circle)
定義
感光元器件對角線尺寸。
靶面大小示意圖
傳感器類型
對角線長度(mm)
傳感器寬度(mm)
傳感器高度(mm)
1/3"
6.000
4.800
3.600
1/2.5"
7.182
5.760
4.290
1/2"
8.000
6.400
4.800
1/1.8"
8.933
7.176
5.319
2/3"
11.000
8.800
6.600
1"
16.000
12.800
9.600
4/3"
22.500
18.800
13.500
全畫幅-35mm
43.300
36.000
24.000
10
鏡頭接口(Mount)
C接口是工業(yè)鏡頭最為常用的一種接口,其法蘭距(法蘭面距離感光芯片的距離)為17.526mm,螺紋規(guī)格:直徑1英寸,螺距1-32UNF;
CS接口是監(jiān)控行業(yè)較為常用的一種接口,其法蘭距(法蘭面距離感光芯片的距離)為12.526mm,螺紋規(guī)格:直徑1英寸,螺距1-32UNF;
從下圖來直觀地了解C接口與CS接口區(qū)別:
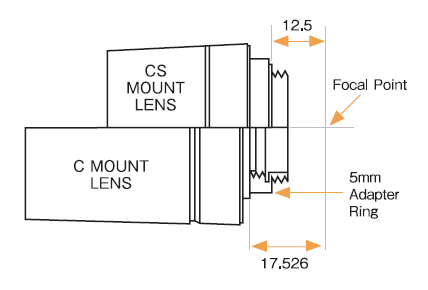
a.C接口的相機不能搭配CS接口的鏡頭使用,會導(dǎo)致圖像不清晰;
b.CS接口的相機可以搭配C接口的鏡頭使用,但是要使用5mm轉(zhuǎn)接圈才能正常聚焦;
F接口是一種卡口型接口,法蘭距46.5mm,最早由Nikon為其35mm式相機而開發(fā)。目前較多的應(yīng)用在大靶面相機和線掃描相機上,使用此接口,鏡頭可輕松安裝和拆卸;
M接口是一種螺紋接口,通常用于替換較大靶面相機的F接口,由接口直徑(42mm、58mm、72mm等)、螺距(0.75mm、1mm等)和法蘭距定義,種類較多;
S接口是M接口的一種,規(guī)格:螺紋直徑12mm,螺距0.5mm。
原文標(biāo)題:工業(yè)鏡頭參數(shù)知多少
文章出處:【微信公眾號:新機器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
責(zé)任編輯:haq
-
芯片
+關(guān)注
關(guān)注
455文章
50714瀏覽量
423155 -
相機
+關(guān)注
關(guān)注
4文章
1350瀏覽量
53581 -
機器視覺
+關(guān)注
關(guān)注
161文章
4369瀏覽量
120282
發(fā)布評論請先 登錄
相關(guān)推薦

機器視覺與運動控制:科技協(xié)同下的完美搭檔
工業(yè)相機鏡頭參數(shù)詳解助力精準(zhǔn)選型

工業(yè)鏡頭光學(xué)原理、優(yōu)勢及應(yīng)用

線掃工業(yè)鏡頭的參數(shù)和用途
深度學(xué)習(xí)在工業(yè)機器視覺檢測中的應(yīng)用
機器視覺的基本功能包括哪些方面
什么是工業(yè)機器視覺?它有哪些作用?
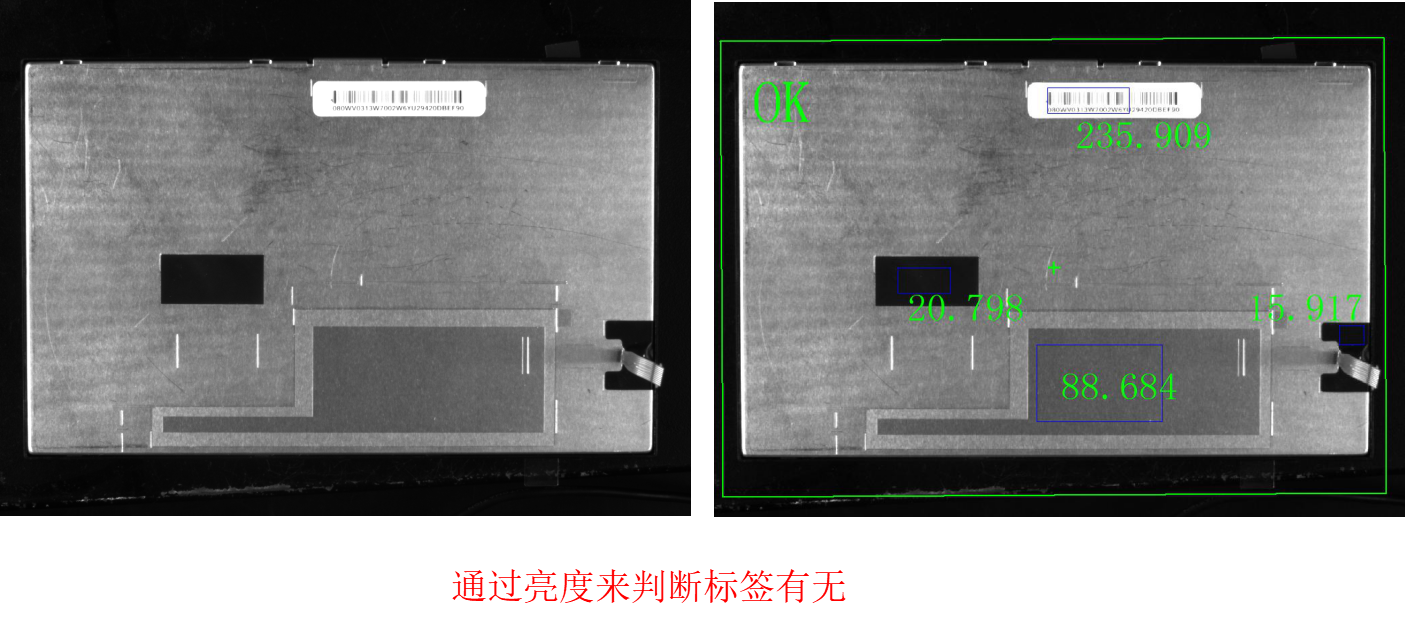
零件文字標(biāo)簽機器視覺檢測有無
機器視覺的鏡頭和圖像采集卡硬件技術(shù)分析
工業(yè)鏡頭中常見的參數(shù)之工作距離、物距、法蘭距及鏡頭接口

機器視覺工業(yè)鏡頭的相關(guān)專業(yè)術(shù)語介紹
機器視覺軟件有哪些 機器視覺軟件的優(yōu)點

工業(yè)相機搭配的鏡頭品牌






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論