 一文帶你讀懂蜂窩車聯網C-V2X
一文帶你讀懂蜂窩車聯網C-V2X
V2X是什么
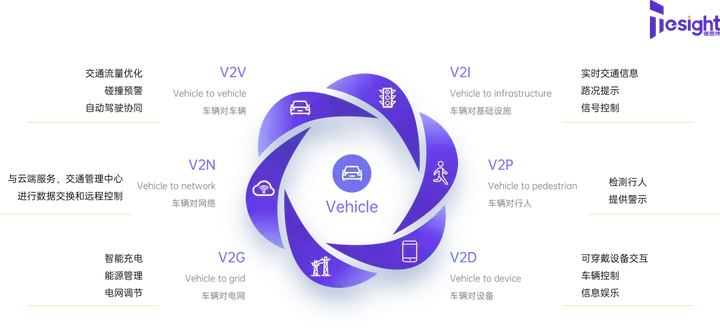
V2X,即vehicle to everything,車聯萬物。
簡單來說,就是賦予車輛通信能力,通過V2V(車對車)、V2P(車對行人)、V2I(車對基礎設施)、V2N(車對網絡),讓駕乘體驗更加舒適,交通環境更加安全,使能未來的自動駕駛。
來源: Rohde & Schwarz
相信很多開車人都有這樣的體會:行駛在一條道路,連續好幾個路口都遇到紅燈,一路走走停停,不僅浪費時間,而且特別耗油。有時候,明明前方一輛車也沒有,卻還要傻等紅燈變綠。你一定會想,如果交通燈也有眼睛和大腦,那該多好啊!
其實,利用V2I(車對基礎設施)、V2N(車對網絡)技術,就可以掌控全局的交通流量,大幅縮減等待時間,從而實現“綠燈暢行”。
再舉一個例子,你平時在開車的時候,有沒有遇到過突然竄出的行人或者電瓶車,被他們嚇個半死?
這個時候,V2P(車對行人)技術就可以派上用場了。它能夠在非視距情況下,捕捉周圍環境的信息,讓我們擁有“上帝視角”,對潛在威脅進行提前準備。
來源: KEYSIGHT
實際上,我們應該把V2X技術理解為高級駕駛輔助系統(ADAS)的一部分。V2X和其它多種多樣的傳感器(如攝像頭,激光雷達等)相輔相成,共同輔助完成高級別的自動駕駛。
從理論上來說,單車(例如Google的自動駕駛汽車)不計成本地堆砌傳感器,也能完成自動駕駛。
但是,缺少了V2X的自動駕駛汽車,就好像是一座信息孤島。它沒辦法有效地和周圍車輛或者基礎設施進行溝通交流,在感知和決策上存在極大的限制。
▉ 兩種方案(DSRC vs C-V2X)對比
目前,國際上有兩套主流的V2X通信技術規范,它們分別是:
DSRC(專用短距離無線通信):基于IEEE 802.11p,歐洲的ITS-G5同樣是基于該物理層技術,我們在這里只討論DSRC即可
C-V2X(蜂窩車聯網):基于3GPP LTE
來源: KEYSIGHT
DSRC已經存在很多年了,因為存在一些先天的不足,發展過程并不順利。相比之下,3GPP的C-V2X有很多優勢,所以這幾年發展很快。
我們不妨從各個角度來比較一下這兩種技術方案:
首先,從技術角度來看。
5GAA(5G汽車聯盟)針對DSRC和C-V2X,在實驗室及外場進行了試驗對比。結果證實,C-V2X在很多方面的性能,都要優于DSRC。比如,C-V2X支持更遠的通信距離、更佳的非視距性能、更強的可靠性、更高的容量和更佳的擁塞控制等。(詳細的測試報告請參考文末附件)
來源: 5GAA測試報告P-190033
其次,再從成本和標準化的角度來看。
在這兩方面,C-V2X也有一些顯著的優勢:
C-V2X基于蜂窩網絡,與目前的4G和5G網絡可以復用,網絡覆蓋范圍廣,部署成本較低。相反,基于802.11p的DSRC技術,在組網時需要新建更大量的路側單元RSU,部署成本很高
C-V2X基于3GPP標準,全球范圍內具備更佳的兼容性
C-V2X演進路線非常清晰,且后向兼容(LTE C-V2X NR C-V2X)
來源: Qualcomm
最后,從政策支持的角度來看。
在這方面,C-V2X也有后來居上之勢:
美國之前一直支持DSRC,但是最近的態度開始有所轉變,偏向C-V2X。美國聯邦通信委員會FCC最近針對5.9GHz的重新分配進行了投票,結果,劃了20MHz給C-V2X專用
歐洲的態度比較糾結,DSRC和C-V2X兩種技術都表示支持
中國擁有全球最大的LTE網絡,綜合考慮應用價值、成本、性能、專利、政策、產業成熟度等各方面因素,C-V2X無疑是我國V2X技術路線的首選。頻譜方面,劃定了20MHz給C-V2X專用
▉ C-V2X的3GPP標準化進展
C-V2X未來能否走向成功,僅靠通信行業的支持是不夠的。它還需要來自汽車行業代表的有力支持。
2016年9月,5GAA聯盟成立,截至目前已有一百多名汽車和通信行業代表參與其中,共同推進全球C-V2X的開發部署。
針對C-V2X,3GPP采取了分階段迭代的發展策略:
第一階段,是LTE-V2X (R14)和LTE-eV2X (R15),主要是針對V2X進行安全增強
第二階段,是NR-V2X (R16及其演進版本), 聚焦自動駕駛場景
來源: KEYSIGHT
R16已經支持車輛編隊、高級駕駛、外延傳感、遠程駕駛等場景。
來源: 3GPP TS 22.186
筆者預計,與LTE-V2X類似,NR-V2X也將經歷至少兩個版本(甚至更多)的演進和迭代。當前3GPP已經啟動了R17技術標準的研究工作,初步規劃了R17的主要增強技術,繼續對現有版本進行演進。
來源: 3GPP官網
▉ C-V2X的關鍵技術
首先從架構的角度看。非漫游場景下,5G支持V2X的架構如下圖所示:
來源: 3GPP TS 23.287
筆者認為,MEC將會是V2X很重要的一個關注點(并沒有在架構圖中直接畫出)。
根據Intel的研究報告,2020年,一輛自動駕駛汽車每天將使用4000GB的數據。相比之下,一個互聯網用戶每天使用的數據大約是1.5GB。車輛和道路的數量龐大且復雜,加之傳感器數量的增加,由此會帶來的大數據處理和存儲的難題。
MEC是解決這一難題的有效手段。借助MEC技術,很多服務可以部署到更加靠近車輛和道路等數據源的地方,節省網絡資源并降低延遲。
接下來,我們從接口的角度看。
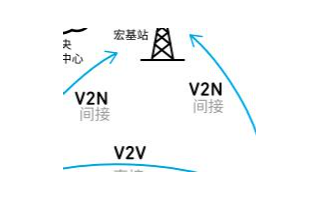
常常有人會問:“在沒有網絡覆蓋的條件下,C-V2X如何工作?”
前面的架構圖告訴我們,即使是在沒有4G/5G網絡覆蓋的環境下,C-V2X還是可以利用PC5接口進行彼此通信的。
Uu接口主要是用來實現時延不敏感業務,進行信息共享和提前預測。
PC5接口主要是用來實現低時延的業務,提高非視距條件下的可靠性。
來源: Qualcomm
PC5接口進一步區分為兩種工作模式:
模式3:借助基站,通過控制信令接口Uu實現V2V數據的調度和接口管理。在這種情況下,采用動態的方式進行資源的調度,車車間采用PC5接口通信。
模式4:V2V數據調度和接口的管理是基于車車間的分布算法實現。
來源: Rohde & Schwarz
再從協議棧的角度來看。
基于PC5接口的協議棧,如下所示(基于Uu接口的協議棧和傳統的5G協議棧一樣,這里不再贅述):
來源: Qualcomm
3GPP定義了其中的PHY和MAC層,完全重用DSRC既有的高層協議規范(它們由SAT和IEEE制定)。這就意味著,用戶從DSRC遷移到C-V2X的成本會相對較低。
最后,我們來簡單了解一下最新的NR-V2X在物理層和協議層方面做了哪些提升(3GPP TR 38.885的第5、6章節有較為詳細的描述。備注:協議規范中通常使用Sidelink這個詞來描述PC5所承擔的具體功能,簡稱SL),這里僅針對PC5的提升方面進行簡要說明:
概念上提出了點對點播、組播的概念,之前PC5只支持廣播
物理層處理方面,SL的PSSCH、PSCCH 的資源分配上更規整,便于實現(如下圖所示),此外SL支持開環功率控制(OLPC)
同步方面,SL可以使用 S-PSS, S-SSS 完成同步
協議層方面,明確定義SL 通信有三種模式: RRC連接模式(RRC_CONNECTED)、空閑模式(RRC_IDLE)和未激活模式(NR情況下)(RRC_INACTIVE)。在空閑或未激活模式下UE的SL通信是通過SIB 消息里的小區配置信息來完成的。
▉ 結語
目前,全球的C-V2X試驗案例正在不斷增加。
圍繞C-V2X的通信芯片、模組、終端、整車制造、測試驗證、運營服務、高精度定位和地圖服務等上下游廠商,都在積極進行布局,希望搶占市場先機。
行業普遍認為,基于C-V2X的車聯網,很可能成為5G時代最先成功的垂直行業應用場景。
來源: IMT-2020推進組C-V2X白皮書
在我們國家,政府層面非常鼓勵包括C-V2X在內的車聯網技術的發展。工信部、發改委、交通部、公安部、科技部等部委及地方政府,都針對性給出了一些明確的政策支持。
據不完全統計,目前全國已經擁有超過30個測試示范區,其中包括上海、北京-河北、重慶、無錫(先導區)、杭州-桐鄉、浙江、武漢、長春、廣州、長沙、西安、成都、泰興、襄陽等16個國家級示范區。
這些示范區涵蓋了無人駕駛和V2X測試場景建設、LTE-V2X/5G車聯網應用、智慧交通技術應用等功能,提供了涉及安全、效率、信息服務、新能源汽車應用以及通信能力等的測試內容。
雖然車聯網技術正在飛速發展,我們也仍需意識到,車聯網最終目標的實現(包括自動駕駛的落地),是一個漫長的過程。除了技術和資金之外,還涉及到法律和倫理的問題。更重要的是,它是否能獲得最終用戶的信任和認可,被用戶接受。
行業曾經指出,自動駕駛將分為若干個過程,逐步實現:
第一個階段:輔助駕駛安全和提高交通效率
第二個階段:在封閉園區的(商用車)的自動駕駛
第三個階段:在開放道路的(乘用車)的自動駕駛
來源: 5GAA白皮書
總而言之, 路漫漫其修遠兮,C-V2X將上下而求索。
責任編輯:haq
-
通信
+關注
關注
18文章
6043瀏覽量
136181 -
車聯網
+關注
關注
76文章
2592瀏覽量
91674
發布評論請先 登錄
相關推薦
C-V2X測試探秘系列之電磁兼容試驗方法

車路云一體化加速落地,C-V2X前裝上車爆發!芯片、模組廠商如何放大招?
基于V2X和自動駕駛HIL聯調的仿真測試系統開發


是德科技出席2024 C-V2X“四跨”(上海)先導應用實踐活動

C-V2X安全證書:保障車路云系統通信安全的關鍵
數字證書與數字簽名:汽車C-V2X通信安全的基石

Qorvo半導體解碼車聯網:探索駕駛的未來浪潮與標準化
深度解析消費者最關心的車聯網核心問題
車聯萬物C-V2X與背后的連接組件
5G車聯網按下加速鍵,三大廠商亮劍,5G車規模組新品有何亮點?

Samtec應用科普 | C-V2X技術在汽車領域的應用






 工商網監
工商網監
評論