") H橋電機驅動電路詳解
H橋電機驅動電路詳解
電機:俗稱“馬達”,依據(jù)電磁感應定律實現(xiàn)電能轉換或傳遞的一種電磁裝置。包括:電動機和發(fā)電機。
電動機在電路中是用字母M表示,它的主要作用是產(chǎn)生驅動轉矩;作為用電器或各種機械的動力源,發(fā)電機在電路中用字母G表示,它的主要作用是利用機械能轉化為電能。
電機控制:對電機的啟動、加速、運轉、減速及停止進行的控制。
1.直流有刷電機
直流有刷電機(Brushed DC,簡稱BDC),由于其結構簡單,操控方便,成本低廉,具有良好的偏動和調速性能等優(yōu)勢,被廣泛應用于各種動力器件中,小到玩具,按鈕調節(jié)式汽車座椅,大到印刷機械等生產(chǎn)機械中都能看到它的身影。
直流電源的電能通過電刷和換向器進入電樞繞組,產(chǎn)生電樞電流,電樞電流產(chǎn)生的磁場與主磁場相互作用產(chǎn)生電磁轉矩,使電機旋轉帶動負載。
優(yōu)點:價格低、控制方便
缺點:由于電刷和換向器的存在,有刷電機的結構復雜,可靠性差,故障多,維護工作量大,壽命短,換向火花易產(chǎn)生電磁干擾。
2.步進電機
步進電機就是一種將電脈沖轉化為角位移的執(zhí)行機構;更通俗一點講:當步進驅動器接收到個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度。我們可以通過控制脈沖的個數(shù)來控制電機的角位移量,從而達到精確定位的目的;同時還可以通過控制脈沖頻率來控制電機轉動的速度和加速度,從而達到調速的目的。
優(yōu)點:控制簡單,低速扭矩大,成本低;
缺點:步進電機存在空載啟動頻率,所以步進電機可以低速正常運轉,但若高于一定速度時就無法啟動,并伴有尖銳的嘯叫聲;同時,步進電機是開環(huán)控制,控制精度和速度都沒有伺服電機那么高。
3.伺服電機
伺服電機廣泛應用于各種控制系統(tǒng)中,能將輸入的電壓信號(或者脈沖數(shù))轉換為電機軸上的機械輸出量,拖動被控制元件,從而達到控制目的。伺服電機系統(tǒng)見下圖。一般地,要求轉矩能通過控制器輸出的電流進行控制;電機的反應要快、體積要小、控制功率要小。伺服電機主要應用在各種運動控制系統(tǒng)中,尤其是隨動系統(tǒng)。
伺服電機有直流和交流之分,最早的伺服電機是一般的直流有刷電機,在控制精度不高的情況下,才采用一般的直流電機做伺服電機。當前隨著永磁同步電機技術的飛速發(fā)展,絕大部分的伺服電機是指交流永磁同步伺服電機或者直流無刷電機。
優(yōu)點:可使控制速度,位置精度非常準確,效率高,壽命長。
缺點:控制復雜,價格昂貴,需要專業(yè)人士才能控制。
4.無刷直流電機
無刷直流電機【BLDCM】是在有刷直流電機的基礎上發(fā)展來的,但它的驅動電流是不折不扣的交流。一般地,無刷電機的驅動電流有兩種,一種是梯形波(方波),另一種是正弦一般的,把方波驅動的叫做直流無刷電機(BLDC);把正弦波驅動的叫做永磁同步電機(PMSM),這個實際上就是伺服電機。
直流無刷電機與伺服電機有類似的優(yōu)缺點。BLDC電機比PMSM電機造價便宜一些,驅動控制方法簡單一些。
5.直流減速電機
減速電機的重要參數(shù)
電機一般還有一個最小啟動電壓,就是可以使得電機(無負載)、開始旋轉的電壓值。為保證電機正常工作,一般需要接到電機兩端的電壓值范圍為:最小啟動電壓至額定電壓。并且在這個電壓值范圍內才認為轉速與電壓成正比。
電機線圈是有銅導線繞線而成的,所以其電機電樞繞組電阻一般都是非常小這樣回路中電流一般都是比較大的。這對我們電機驅動設計有很大的影響。
另外,電機還有一個比較重要的參數(shù):扭矩。簡化理解扭矩就是電機可以帶動外部部件旋轉的力量,在物理上用轉矩來描述,單位為:N.m(常用單位有:Kg.cm)。大扭矩可以帶動比較重的東西。一般認為:直流電機的扭矩和電流成正比。
6.直流減速電機驅動設計
直流電機旋轉:給電機兩根線供電電機就可以旋轉,給正電壓電機正轉,給相反電壓電機反轉;電壓越大,電機轉得越快,電壓越小,轉速也變小。 一般我們利用STM32單片機可以方便的調整電機速度,但STM32的IO接口電壓和電流一般都是非常有限的,電壓是3.3V,電流是8mA,所以為方便控制需要在微控制器和電機直接添加驅動電路板,該電機驅動板有兩種輸入線:電源輸入線和控制信號輸入線。電源輸入線一般要求是可以提供電機額定電源的大電流電源,一般來說電機所需要的電壓和額定電流是多少,那么就要給電機驅動板提供多大的電壓和電流,它是給電機提供動力的來源。控制信號線與微控制器的信號線連接,是實現(xiàn)調速的方法,一般是PWM的可調方波信號。電機驅動板還有一個輸出線,有兩個接口,它與直流電機的引腳直接連接。注意,這里的電機驅動板輸出線是應該一系列電路之后才輸出的,也就是通過輸入信號調制后的輸出線。機控制都是必須有驅動器的。
如果不需要正反轉控制(單向旋轉),可以用下圖驅動電路,實現(xiàn)電機單向控速。
◆當開關A和D閉合、B和C斷開時直流電機正常旋轉,記該旋轉方向為正方向。 ◆當開關B和C閉合、A和D斷開時直流電機正常旋轉,記該旋轉方向為反方向。 ◆當開關A和C閉合、B和D斷開或者當開關B和D閉合、A和C斷開時直流電機不旋轉。此時可以認為電機處于“剎車”狀態(tài),電機慣性轉動產(chǎn)生的電勢將被短路,形成阻礙運動的反電勢,形成“剎車”作用。 ◆當開關A和B閉合或者當開關C和D閉合時直接電源短路,會燒毀電源,這種情況嚴禁出現(xiàn)。 ◆當開關A、B、C和D四個開關都斷開時候,認為電機處于“惰行”狀態(tài),電機慣性所產(chǎn)生的電勢將無法形成電路,從而也就不會產(chǎn)生阻礙運動的反電勢,電機將慣性轉動較長時間。
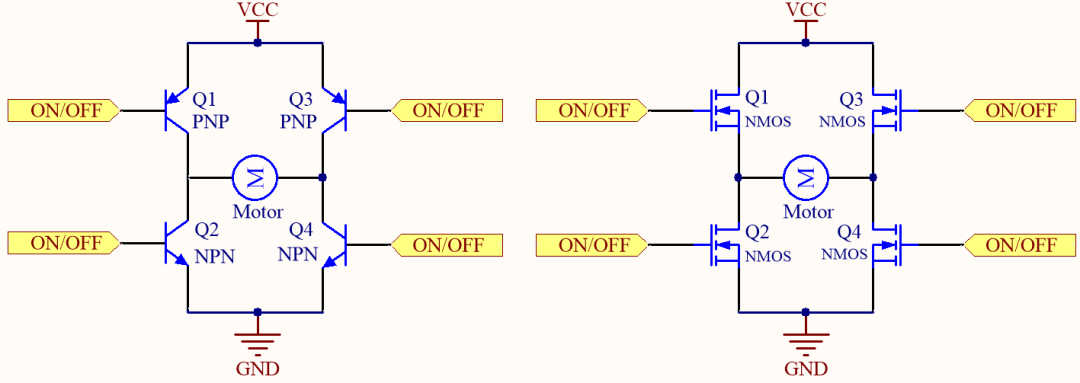
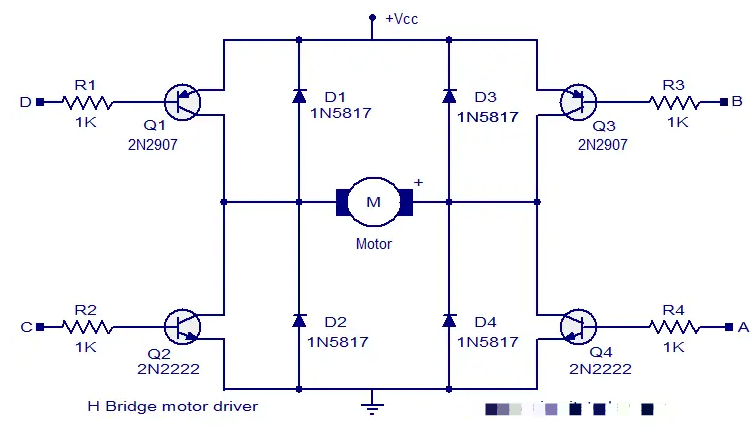
這樣簡單的控制開關狀態(tài)就可以控制電機的選擇方向。從上圖中可以看到,其形狀類似于字母“H”,而作為負;載的直流電機是像“橋”一樣架在上面的;所以稱之為“H橋驅動”。4個開關所在位置就稱為“橋臂”。在電路中可以做電子開關的有三極管和MOS管。可以使用這兩種器件代替開關從而實現(xiàn)。
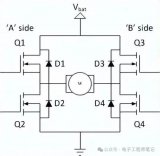
7.H橋電路分析
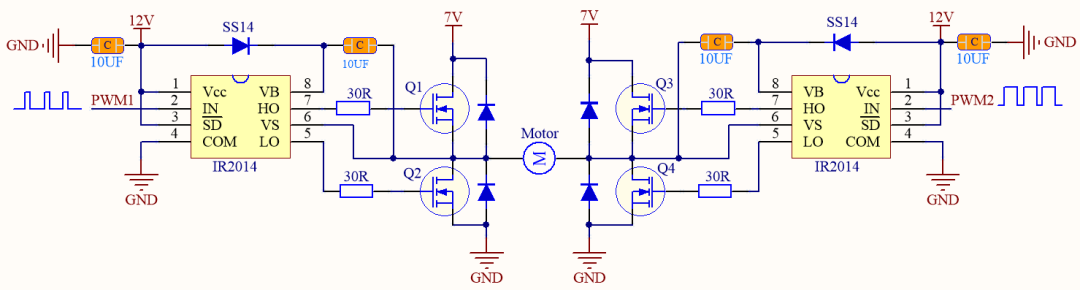
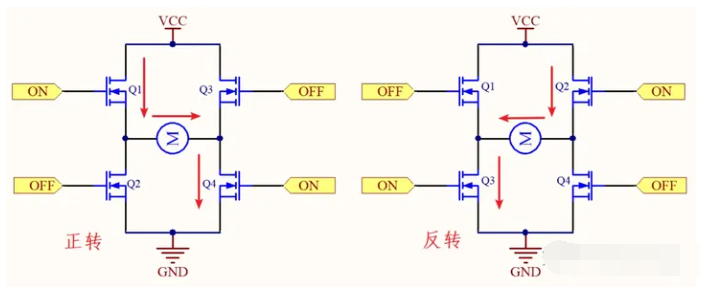
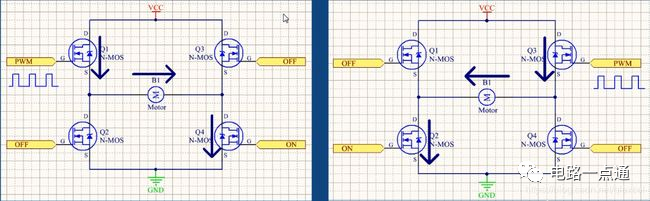
下面以MOS管搭建的H橋電路解釋電機正反轉控制。要使電機運轉,必須使對角線上的一對MOS管導通。如下圖,當Q1管和Q4管導通時(此時必須保Q2和Q3關斷),電流就從電源正極經(jīng)Q1從左至右穿過電機,然后再經(jīng)Q4回到電源負極。按圖中電流箭頭所示,該流向的電流將驅動電機順時針轉動。
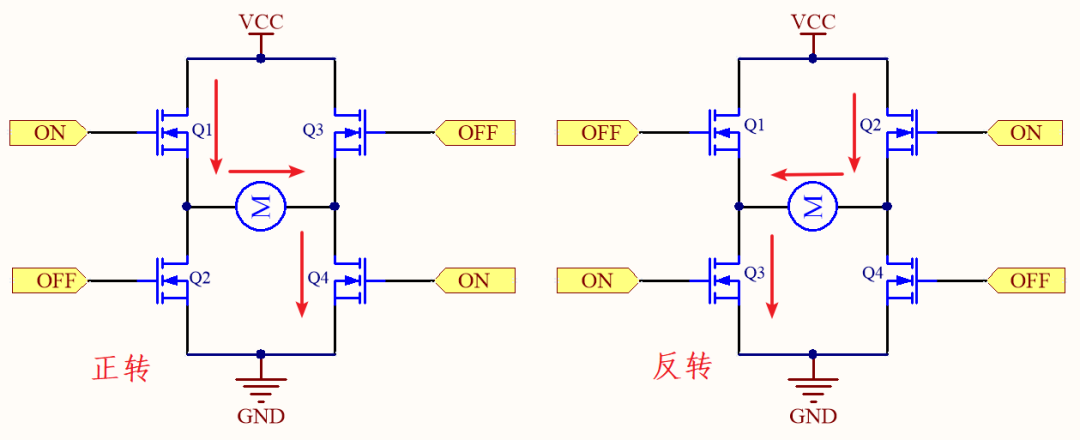
另一對MOS管2相Q3導通的時候(此時必須保證Q1和Q4關斷),電流從右至左流過電機,從而驅動電機沿逆時針方向轉動。驅動電機時,保證H橋兩個同側的MOS管不會同時導通非常重要,如果MOS管Q1和Q2同時導通,那么電流就會從電源正極穿過兩個MOS管直接回到負極,此時電路中除了MOS管外沒有其它任何負載,因此電路上的電流就達到最大值,燒壞MOS管和電源。Q3和Q4同時導通是同樣的道理。
驅動電機時,保證H橋兩個同側的MOS管不會同時導通非常重要,如果MOS管Q1和Q2同時導通,那么電流就會從電源正極穿過兩個MOS管直接回到負極,此時電路中除了MOS管外沒有其它任何負載,因此電路上的電流就達到最大值,燒壞MS管和電源。Q3和Q4同時導通是同樣的道理。
簡單的開關只能控制電機正反轉,引入PWM控制可以實現(xiàn)方向和速度調節(jié)。調節(jié)占空比實現(xiàn)控速,占空比越大平均電壓(電流)越大,速度越快PWM頻率一般在10KHz~20KHz之間。頻率太低會導致電機轉速過低,噪聲較大。頻率太高,會因為MOS管的開關損耗而降低系統(tǒng)的效率。
根據(jù)不同橋臂的PWM控制方式不同,大致上可以分為三種控制模式:受限單極模式、單極模式、雙極模式。
1.受限單極模式
受限單極模式:電機電樞驅動電壓極性是單一的
優(yōu)點:控制電路簡單。
缺點:不能剎車,不能能耗制動,在負載超過設定速度時不能提供向力矩。調速靜差大,調速性能很差,穩(wěn)定性也不好。
2.單極模式
單極模式:電機電樞驅動電壓極性是單一的。
優(yōu)點:啟動快,能加速,剎車,能耗制動,能量反饋,調速性能不如雙極模式好,但是相差不多,電機特性也比較好。在負載超速時也能提供反向力矩。
缺點:剎車時,不能減速到0,速度接近0速度時沒有制動力。不能突然倒轉。動態(tài)性能不好,調速靜差稍大。
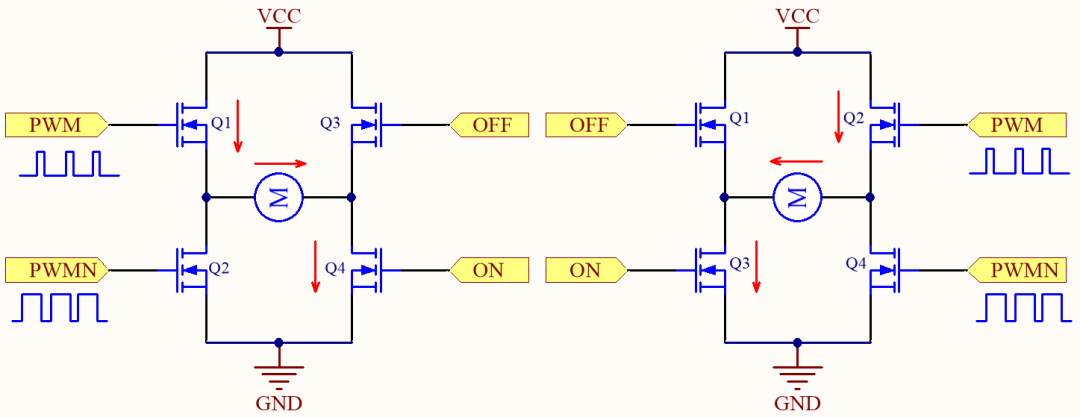
PWM和PWMN是互補的PWM信號,一般用高級控制定時器的通道和互補通道控制。在PWM為高電平時:MOS管1和4都導通,MOS管2和3都截止,電流從電源正極,經(jīng)過MOS管1,從左到右流過電機、然后經(jīng)過MOS管4流入電源負極。在PWM為低電平時:MOS管2和4都導通,MOS管1和3都截止,根據(jù)楞次定律,存在自感電動勢,電流還是從左到右流過電機,經(jīng)過MOS管4和MOS管2形成電流回路。
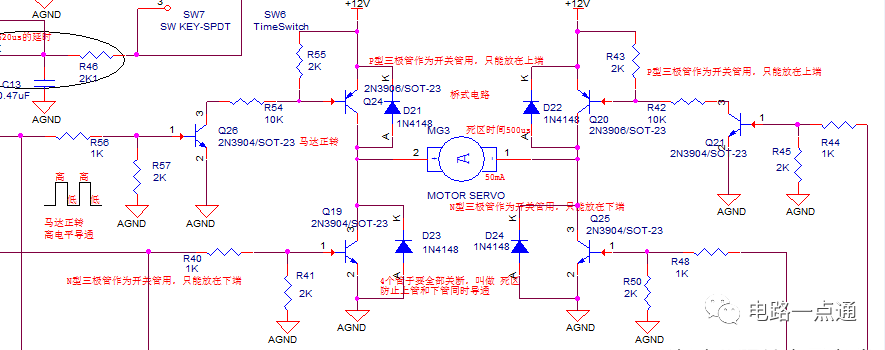
3.雙極模式
雙極模式:電樞電壓極性是正負交替的。
優(yōu)點:能正反轉運行,啟動快,調速精度高,動態(tài)性能好,調速靜差小,調速范圍大,能加速,減速,剎車,倒轉,能在負載超過設定速度時,提供反向力矩,能克服電機軸承的靜態(tài)摩擦力,產(chǎn)生非常低的轉速。
缺點:控制電路復雜。在工作期間,4個MOS管都處于工作狀態(tài),功率損耗大,電機容易發(fā)燙。
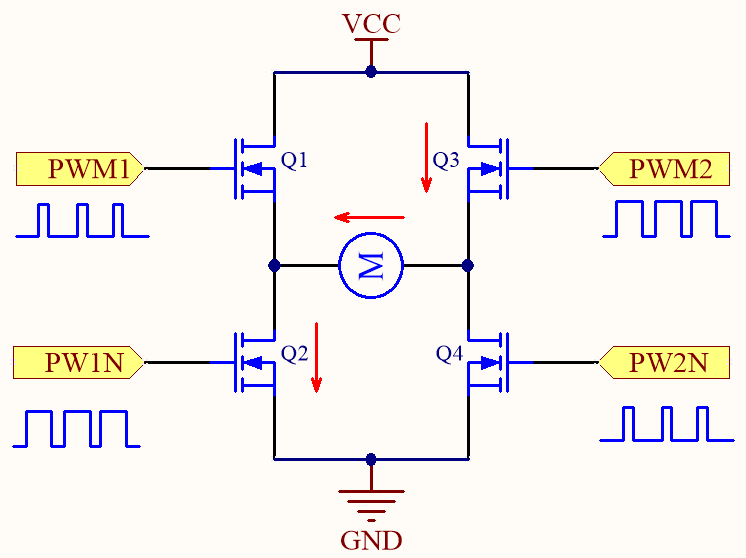
PWM1和PWM1N、PWM2和PWM2N是PWM互補通道。使用高級控制定時器通道和互補通道控制雙極模式中,PWM1和PWM2周期相同,占空比相同,極性相反,使得對角線上的兩個MOS管同時導通,同時關斷。
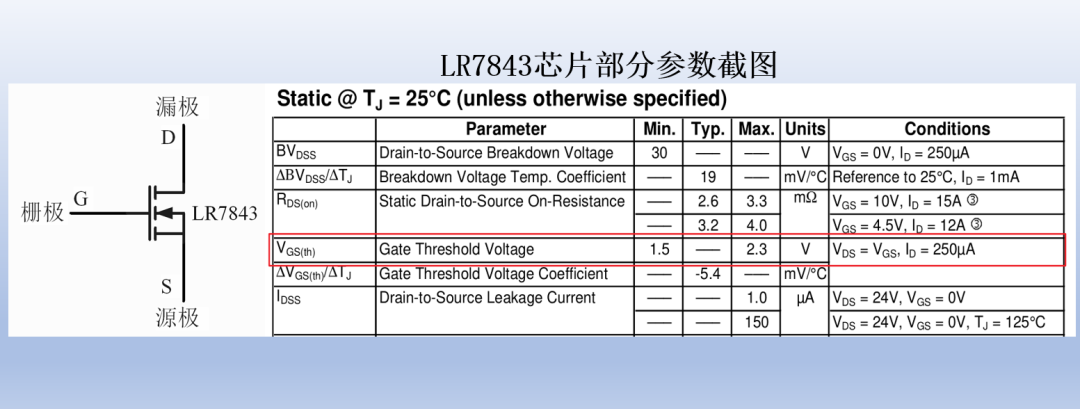
H橋中一般使用4個N型MOS管來搭建。不用2個N型MOS管+2個P型MOS管的原因是:P型MOS管難做到高耐壓大電流的型號,導通電阻大。同樣性能的MOS,N型比P型便宜。
對于NMOS,當外部給的柵源極Vgs電壓大于芯片的Vgs閾值(大部分在2V-10V之間)時,漏極D和源極S之間直接導通。如果外部給的Vgs電壓小于閾值,漏極D和源極S之間截止。
簡單認為,就是一個由柵極G電壓控制的一個開關。
假設圖中N-MOS管的Vgs閾值為3V,VCC=24V。
對于下橋臂Q2MOS管可以使用STM32芯片引腳直接控制,因為STM32的PWM高電平是3.3V足夠使N-MOS管導通。
上橋臂Q1 MOS管無法直接使用STM32芯片引腳使其導通,因為假設Q1導通,漏極D和源極S電壓幾乎相等(Rds非常小),即VA=VCC=24V,這樣要求Vg>=VA+Vgs=27V。簡單來說就是,Vg大于27V,Q1導通,小于27V,Q1截止。所以就需要一個這樣的電路:把STM32的3.3VPWM信號升壓到27V電壓上,這個電路可以用自舉電路來實現(xiàn)。
上橋臂驅動:自舉電路
下橋臂驅動:電平控制
實際電路設計中,一般把Vgs設置為10~20V,因為這樣保證MOS管完全導通。
還有一個問題當MOS管完全導通時,MOS管的內阻Rds一般來說就比較小在幾毫歐,就相當于一根導線。但是當MOS管不完全導通時,也就是說Vgs小于開啟電壓時,MOS就處于不完全導通狀態(tài),那么MOS管的內阻就比較大,而電機驅動板的電流也比較大。那么MOS的發(fā)熱就會非常嚴重,很可能會燒壞芯片。

5.半橋驅動芯片IR2104S
所謂半橋驅動芯片,便是一塊驅動芯片只能用于控制H橋一側的2個MOS管。因此采用半橋驅動芯片時,需要兩塊該芯片才能控制一個完整的H橋。
相應的,全橋驅動芯片便是可以直接控制4個MOS管的導通與截止,一塊該芯片便能完成一個完整H橋的控制。
這里使用的IR2104便是一款半橋驅動芯片,因此在原理圖中可以看到每個H橋需要使用兩塊此芯片。
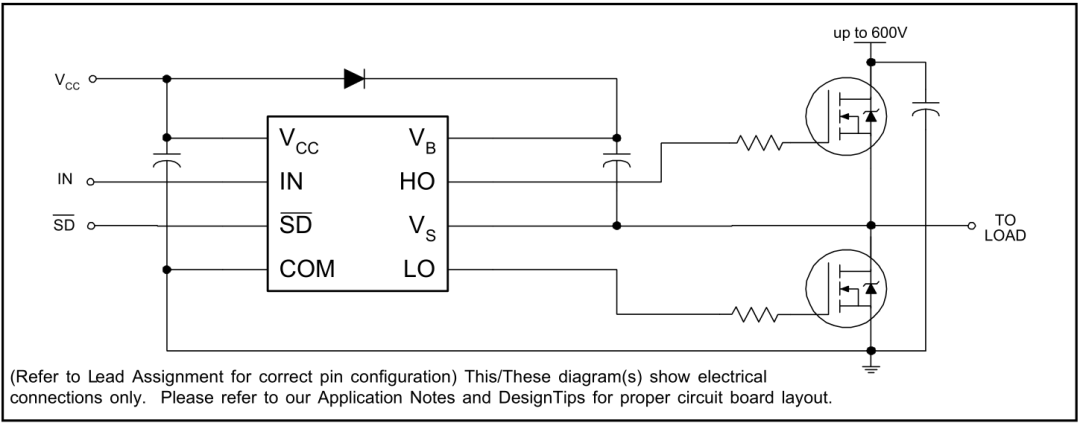
1.典型電路設計(來源于數(shù)據(jù)手冊)
2.引腳功能(來源于數(shù)據(jù)手冊)
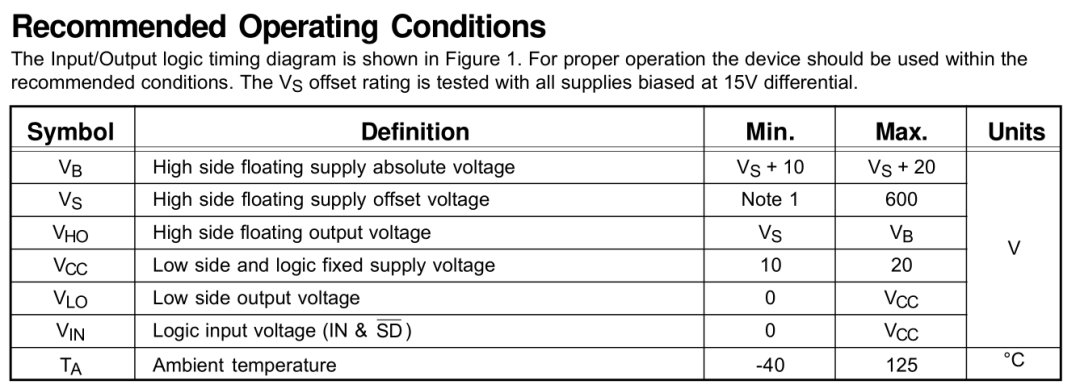
VCC為芯片的電源輸入,手冊中給出的工作電壓為10~20V。
IN和SD作為輸入控制,可共同控制電機的轉動狀態(tài)(轉向、轉速和是否轉動)。
VB和VS主要用于形成自舉電路。
HO和LO接到MOS管柵極,分別用于控制上橋臂和下橋臂MOS的導通與截止。
COM腳直接接地即可。
3.自舉電路
此部分是理解該芯片的難點,需要進行重點講解。從上面的典型電路圖和最初的設計原理圖中均可發(fā)現(xiàn):該芯片在Vcc和VB腳之間接了一個二極管,在VB和VS之間接了一個電容。這便構成了一個自舉電路。
作用:由于負載(電機)相對于上橋臂和下橋臂MOS位置不同,而MOS的開啟條件為Vgs>Vth,這便會導致想要上橋臂MOS導通,則其柵極對地所需的電壓較大。
因為下橋臂MOS源極接地,想要導通只需要令其柵極電壓大于開啟電壓Vth。而上橋臂MOS源極接到負載,如果上橋臂MOS導通,那么其源極電壓將上升到H橋驅動電壓也就是MOS的供電電壓,此時如果柵極對地電壓不變,那么Vgs可能小于Vth,又關斷。因此想要使上橋臂MOS導通,必須想辦法使其Vgs始終大于或一段時間內大于Vth(即柵極電壓保持大于MOS管的電源電壓+Vth)。
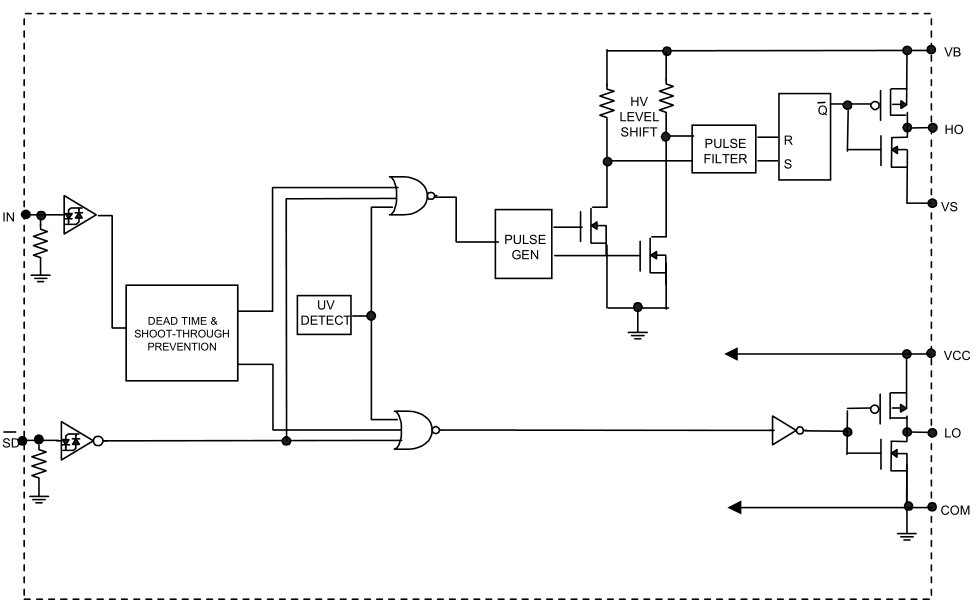
下圖是IR2104S的內部原理框圖。此類芯片的內部原理基本類似,右側兩個柵極控制腳(HO和LO)均是通過一對PMOS和NMOS進行互補控制。
自舉電路工作流程:
以下電路圖均只畫出半橋,另外一半工作原理相同因此省略。假定Vcc=12V,VM=7.4V,MOS管的開啟電壓Vth=6V(不用LR7843的2.3V)。
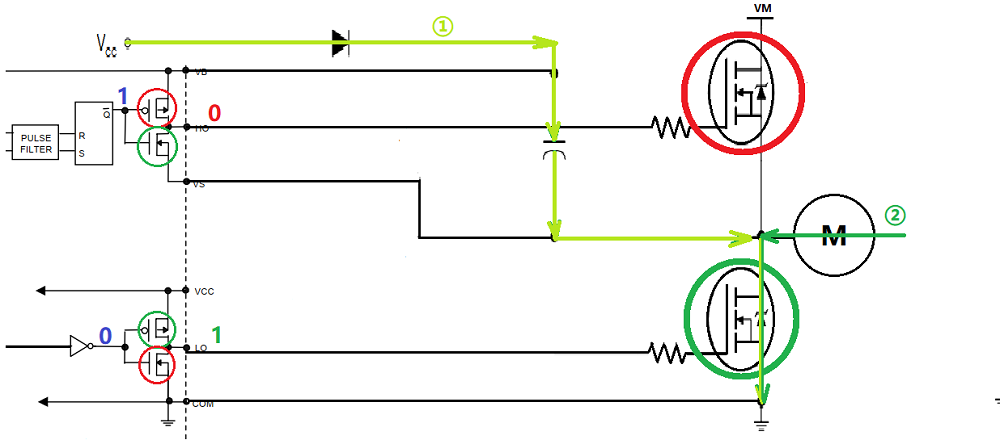
(1)第一階段:首先給IN輸入PWM信號,使HO和LO通過左側的內部控制電路(使上下兩對互補的PMOS和NMOS對應導通),分別輸出低電平和高電平。此時外部H橋的上橋臂MOS截止,小橋臂MOS導通,電機電流順著②線流通。同時VCC通過自舉二極管(①線)對自舉電容充電,使電容兩端的壓差為Vcc=12V。
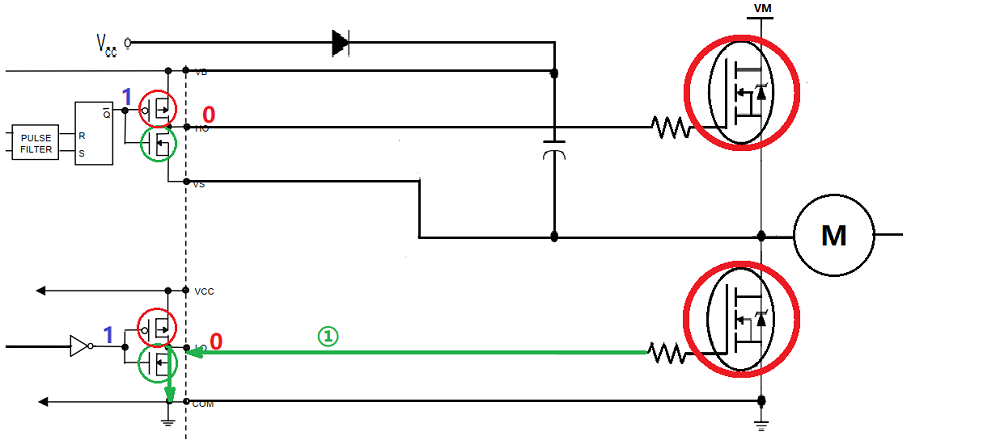
(2)第二階段:此階段由芯片內部自動產(chǎn)生,即死區(qū)控制階段(在H橋中介紹過,不能使上下兩個MOS同時導通,否則VM直接通到GND,短路燒毀)。HO和LO輸出均為低電平,上橋臂MOS截止,之前加在下橋臂MOS柵極上的電壓通過①線放電。
(3)第三階段:通過IN引腳輸出PWM使左側的內部MOS管如圖所示導通。由于電容上的電壓不能突變,此時自舉電容上的電壓(12V)便可以加到上橋臂MOS的柵極和源極上,使得上橋臂MOS也可以在一定時間內保持導通。此時上橋臂MOS的源極對地電壓≈VM=7.4V,柵極對地電壓≈VM+Vcc=19.4V,電容兩端電壓=12V,因此上橋臂MOS可以正常導通。
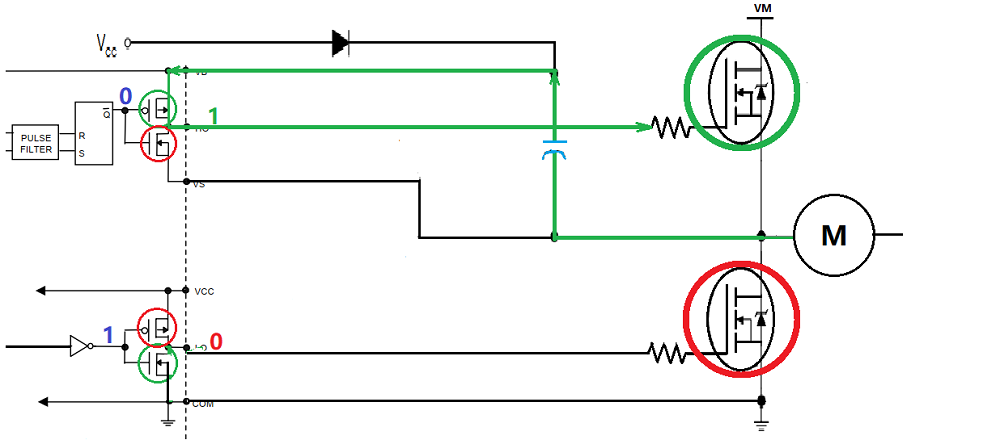
注意:因為此時電容在持續(xù)放電,壓差會逐漸減小。最后,電容正極對地電壓(即上橋臂MOS柵極對地電壓)會降到Vcc,那么上橋臂MOS的柵源電壓便≈Vcc-VM=12V-7.6V=4.4V< Vth=6V,高端MOS仍然會關斷。
★ 因此想要使高端MOS連續(xù)導通,必須令自舉電容不斷充放電,即循環(huán)工作在上述的三個階段(上下橋臂的MOS處于輪流導通的狀態(tài),控制信號輸入PWM即可),才能保證上橋臂MOS導通。自舉二極管主要是用來當電容放電時,防止回流到VCC,損壞電路。
★ 但是,在對上面的驅動板進行實際測試時會發(fā)現(xiàn),不需要令其上下橋臂MOS輪流導通也可以正常工作,這是因為即使自舉電容放電結束,即上橋臂MOS的柵源電壓下降到4.4V仍然大于LR7843的Vth=2.3V。
那么在上述驅動板中,自舉電路就沒有作用了嗎?當然不是,由于MOS管的特性,自舉電路在增加柵源G電壓的同時,還可令MOS管的導通電阻Rds減小,從而減少發(fā)熱損耗,因此仍然建議采用輪流導通的方式,用自舉電容產(chǎn)生的大壓差使MOS管導通工作。
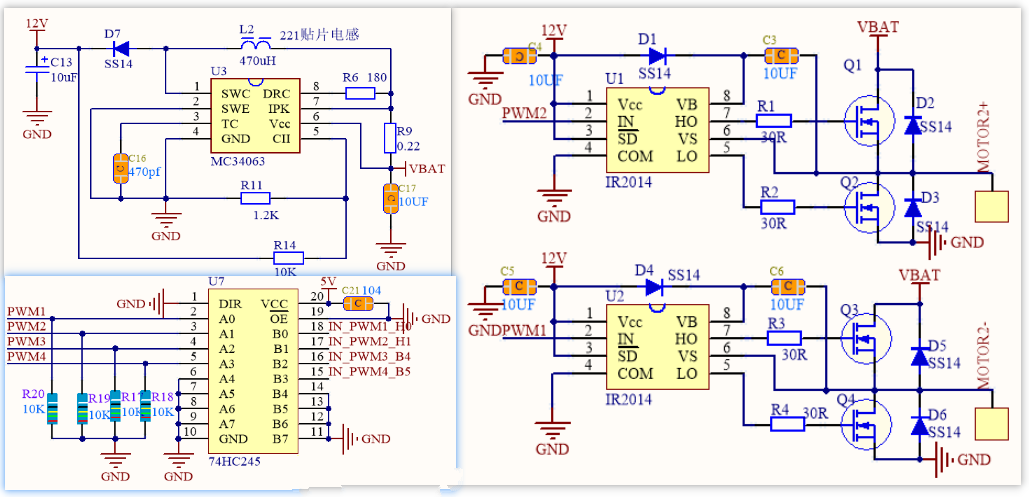
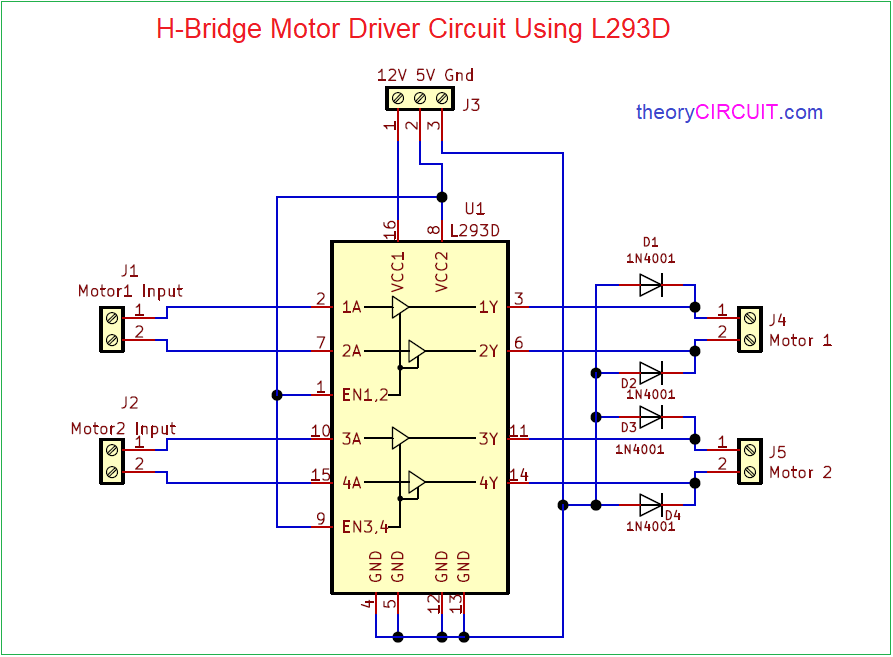
8.原理圖和PCB
責任編輯:lq
-
電路
+關注
關注
172文章
5905瀏覽量
172152 -
電機驅動
+關注
關注
60文章
1216瀏覽量
86728 -
電磁感應
+關注
關注
17文章
824瀏覽量
58029
原文標題:H橋電機驅動電路詳解
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
率能SS6952T 推桿,按摩椅單H橋電機驅動芯片

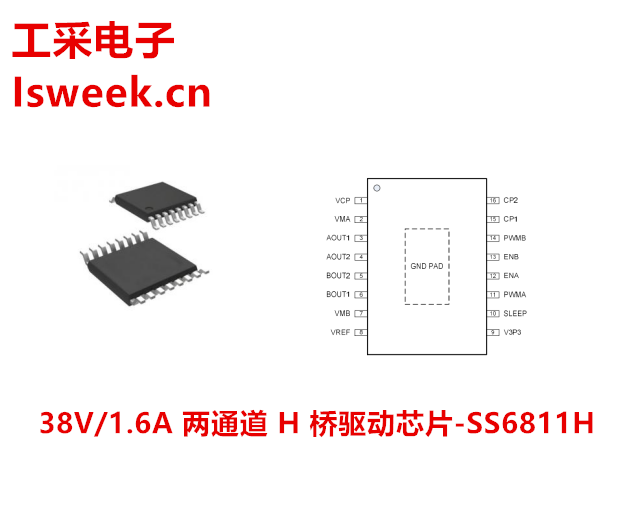
為電機一體化應用提供一種雙通道集成電機驅動方案的電機驅動芯片-SS6811H
使用MSPM0 MCU為步進電機和有刷直流(BDC)電機實現(xiàn)優(yōu)化的H橋驅動器控制

其利天下技術開發(fā)·一文搞懂全橋電路和半橋電路·無刷電機驅動方案
為什么H橋逆變的驅動電路要用隔離電源?
H橋電路是如何工作的?H橋電路有何作用?
H橋驅動電路工作原理圖
直流電機h橋驅動方式有哪些





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論