 基于AT89C52和FB900C角位變送器設計風洞風速及模型姿態控制系統
基于AT89C52和FB900C角位變送器設計風洞風速及模型姿態控制系統
作者:黃福幸,宋輝,李長仁
1、 引言
風洞是能人工產生和控制氣流,用以模擬飛行器或物體周圍氣體的流動,并可量度氣流對物體的作用以及觀察物體現象的一種管道試驗設備。風洞在空氣動力學研究和飛行器設計中起著十分重要的作用,它的發展與航空航天技術的發展密切相關。
目前的風洞大多以計算機為核心配以其它硬件資源完成風洞的風速及模型姿態控制。本文重點介紹以自整角機及其變送器代替傳統的光電編碼器作為角度傳感器完成模型姿態控制的原理及方法。
2、 硬件總體結構
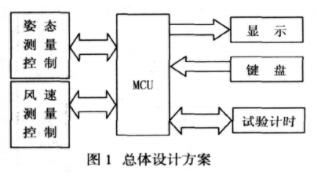
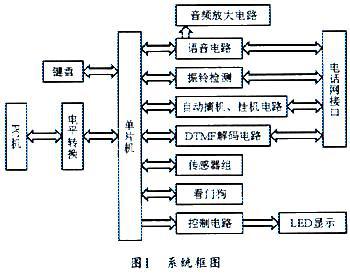
系統用單片機作控制器,采用定位精確的步進電機作為模型姿態執行元件,高精度的角位移傳感器做測量元件,實現對模型的精確控制。系統由微控制器、鍵盤、顯示、攻角及側滑角采集、姿態控制、風速采集、試驗計時等模塊組成,總體方案如圖1所示。
2.1模型姿態測量與控制單元硬件組成
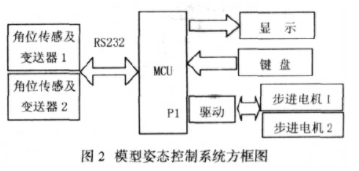
模型姿態即攻角α和側滑角β的測量控制如圖2所示。所選用FB900C系列角位傳感器及變送器其本身為一單片機系統,與系統單片機采用串行通訊。工作過程為通過鍵盤設置α和β角度,通過角位傳感器和變送器測量系統當前角度,計算出要轉過的角度,控制兩個步進電機轉動并送顯示。
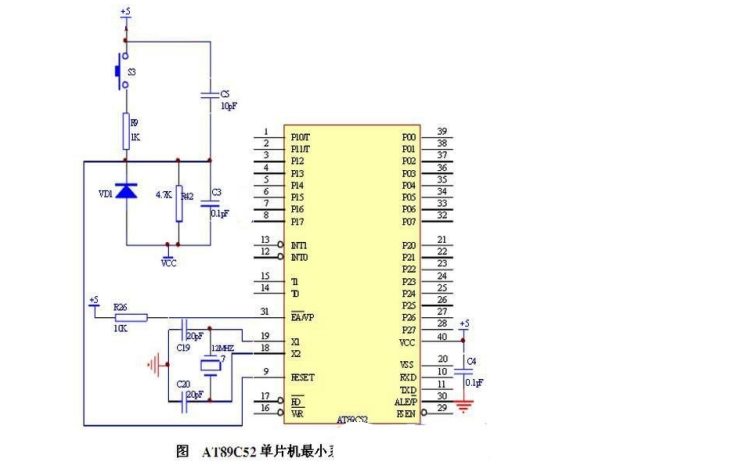
系統采用Atmel公司的AT89C52單片機,該芯片為51系列增強型,內部有8K Flash Rom,三個16位定時計數器和256字節RAM。
單片機與步進電機接口使用P1.0“P1.3四條口線控制兩臺步進電機,P1.0和P1.2用來輸出方波信號,P1.1和P1.3用來輸出方向信號。
FB900C系列角位變送器采用自整角機或旋轉變壓器作檢測元件,運用最新檢測技術,將旋轉物體轉過的角度經微處理器進行處理后換算成角位移或直線位移,然后以4”20mA的模擬量或串行口輸出。該變送器用自整角機或旋轉變壓器組合相當于8“16位的絕對編碼器測量精度,其性價比遠高于編碼器測量方式,是工業現場最為理想的角位測量模塊。
2.2 模型姿態測量與控制程序設計
2.2.1 角度測量程序設計
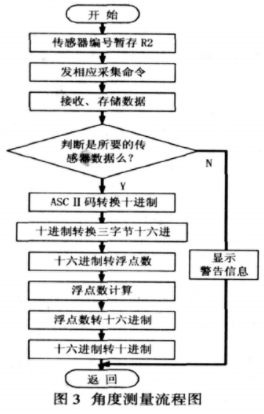
α、β兩個角度的測量是風洞數據采集和控制系統的重點,測量角度的精度直接影響到系統的控制精度。因此,測量中的各子程序的要求比較高,又由于角位移傳感器的輸出為ASCⅡ碼,且數據最大為79 9999所以,程序中采用了浮點數運算子程序、整數與浮點數之間相互轉換子程序,角度測量程序流程如圖3所示。
程序首先從累加器中取得要測量的方向,并把該方向存放在R2中,若R2的值錯誤,程序直接返回不進行任何操作。通過串口取得相應方向角位置數據后,調用進制轉換程序將數據轉換為浮點數,此時對R2中的方向值進行判斷,獲得該方向上的傳動比,計算結果轉換為十進制后也通過判斷R2中的方向值獲得數據存放的單元地址。
程序入口:傳感器編號存于A中。
程序出口:α角度存于51H、β角度存于53H。
部分程序如下:
MS: CLR EA ;關中斷
MOV R2,A ;暫存傳感器編號
MOV SCON,#50H ;設置串口方式
MOV RCAP2H,#0FFH ;自動裝載值
MOV RCAP2L,#0D9H ;
MOV TH2,#0FFH
MOV TL2,#0D9H
MOV T2CON,#34H ;啟動波特率發生器
…… …… ;發送采集命令、進制轉換
LCALL FCIV ;調浮點數運算
…… …… ;進制轉換、存數據
SETB EZ ;開中斷
RET
2.2.2 角度控制程序設計
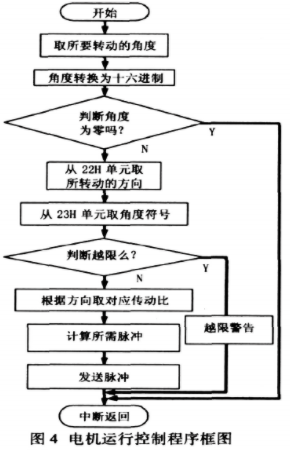
風洞中模型姿態的控制分兩部分,一個是當前姿態的測量,一個是計算步進電機需轉過的角度,角度的控制是在精確地測量當前姿態的基礎上完成的,程序框圖如圖4所示。
和角度測量相似,模型姿態需要改變的角度放在累加器中,需要改變的方向放在22H單元中,符號放在23H單元中,通過計算得到驅動模型轉動給定角度所需要的脈沖數,以及該方向電機的控制端口。
部分程序如下:
DJRUN: JZ AOVER
MOV R2,A ; 待轉角度存于A中
MOV A,22H ; 模型變化方向
CJNE A,#0Ah,NOAJI
LJMP ADJI ;攻角方向(α角)
NOAJI: CJNE A,#0BH,ERROR5
LJMP BDJI ;側滑角方向(β角)
ADJI: MOV A,23H
CJNE A,#0Ah,ADJINOZH
LJMP ADJIZH ;α方向 正轉
ADJINOZH :CJNE A,#0BH,ERROR5
LJMP ADJIFU
ADJIZH: SETB AAJFX ;α方向 正轉
LJMP AMC_DU
ADJIFU: CLR AAJFX ;α方向 反轉
LJMP AMC_DU
AMC_DU: MOV R4,#0AH ;
AMC60: MOV R3,#3CH ;傳動比
AMC10: SETB AAJMC
…… …… ; 單個脈沖產生器
RET
(β方向運行程序和α方向相似)
3、 結論
本文作者創新點為:使用自整角機及其變送器代替傳統的光電編碼器,大大降低了硬件費用。此系統成功應于某大學低速風洞控制系統中,風洞試驗中模型的攻角α的變化范圍為-10度~+25度;側滑角β可在-180度~+180度范圍內任選角度;控制精度和測量精度均為0.5度。
責任編輯:gt
-
單片機
+關注
關注
6037文章
44563瀏覽量
635869 -
控制系統
+關注
關注
41文章
6628瀏覽量
110647 -
變送器
+關注
關注
13文章
1382瀏覽量
91105
發布評論請先 登錄
相關推薦
AT89C52設計智能交通控制系統
AT89C52單片機概述
基于AT89C52單片機的渦流管控制系統
基于AT89C52的洗碗機自動控制系統設計

AT89C52控制蜂鳴器電路圖詳解
使用AT89C52單片機進行最小系統的接口電路免費下載





 工商網監
工商網監
評論