


1. 引 言
功率因數和無功平衡是衡量電網質量的重要標志。我國農網普遍存在供電半徑長、電壓質量差、功率因數低的狀況。如果無功能得到有效的平衡,不僅能大大降低電網的損耗,而且對提高電壓質量具有重要的意義。但是,目前我國大部分城鄉電網功率因數偏低,無功很不平衡。因此提高電網功率因數、平衡無功、提高電壓質量、降低線損,是電力系統的一個重要課題。現今國內大部分的無功補償裝置都是并接電容器固定補償,不能實現動態跟蹤補償。另還有一部分是一路動態跟蹤補償,級數太少,不能做到精補細補。因此,如何實現無功多路補償,仍是國內外同行關注的熱點。
本文設計了一種基于兩路不等容編碼控制投切的無功動態補償裝置,它能隨電網無功的變化,實現四級補償,基本能達到精補細補的目的,使得電網的無功平衡更科學合理,因而在農網中有著廣泛的應用前景。
2. 設計思想
本文主要探討基于兩路不等容編碼投切無功補償裝置的控制原理以及實現的方法。在動態跟蹤無功補償裝置中,如果是單組的動態補償,就可根據電網無功以及電壓的狀況進行投切;如果是多組等容量投切補償,可根據循環投切的原理去設計控制策略;如果是多組不等容投切,其控制策略就要復雜得多。森寶公司之所以研發該產品,主要是以下兩方面的原因:
1) 降低成本。眾所周知,單組無功補償裝置不能做到精細補償,而多組等容的裝置雖能做到相對精細的補償,但是其電容器的組數要多,每組電容器都要配備相應的開關和保護設備,這就大大增加了設備的成本,使節能降損的先期投入成本較大,也使節能降損的效益降低。如果使用不等容投切,就可大大減少設備成本,使用戶的效益最大化。舉例說明,要補償300kvar的電容,級差為100kvar,如果采用等容投切,就需要3臺電容器和3臺開關,而如果采用不等容投切,采用補償一個100kvar和一個200kvar的方法,就只需要兩臺電容器和兩臺開關,這就節省了1臺開關和1套保護裝置的費用,并且減少了故障點。
2) 使裝置的體積減小,節省了空間,也減少故障點。高壓電容器的體積相對比較龐大,而且對絕緣距離有一定的要求,電容器的組數越多,那么體積就會大大增加,這就增加了施工成本和施工難度。而且,組數越多,裝置的故障點越多,使裝置的維護成本增加。使用不等容投切就可以減少這些問題。
基于以上思考,本文設計了兩路不等容投切的戶外高壓無功自動補償裝置。
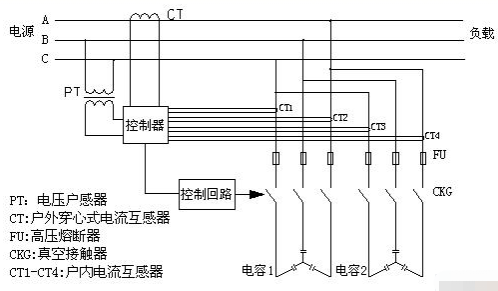
圖 1 系統工作原理圖
如圖1,控制柜內裝有兩臺高壓電容器和高壓真空接觸器,通過單片機控制高壓真空接觸器的開合,完成投切動作。采用高壓熔斷器為電容提供保護。PT采樣高壓電網的B、C相之間的線電壓,除了提供電壓信號,還為控制器和控制回路提供電源。CT采樣線電流,為控制器提供電流采樣信號。CT1-CT4采樣電容器電流,電容器的過流保護和缺相保護提供硬件支持。控制器將采集到的線電壓、線電流、電容器電流的信號進行分析、計算,經過判斷,輸出控制信號,控制真空接觸器關合和開斷。
4. 控制策略
在控制方式上,裝置采用了按無功投切和按功率因數投切兩種方式。用戶可以根據需要來選擇。單就補償的最終目的而言,筆者推薦使用無功來控制比較科學合理。
兩組電容器由于其容量不等,在投切時就要考慮兩個電容器的協調問題,大致來說,分為如下幾個情況:
1) 兩組都未投入。那么則根據所選控制方式,根據實際參數量來投入合適的容量。
2) 小容量電容器已投入。如果過補,則切電容;如果需要投入的容量大于小電容器而小于大電容器,那么切電容器;如果需要投入的容量大于大電容器,那么投大電容器。
3) 大容量電容器已投入。如果過補,那么切電容器;如果需要投入的容量大于小電容器,那么投小電容器。
4) 兩個都已投入。如果過補,那么根據過補的多少,來選擇切除哪一組電容器。
5 控制器硬件電路設計
要實現自動控制,通常的做法是利用微控制器或處理器對采集來的數據進行計算,判斷,然后再對對象進行控制。在本設計中為了使采集數據更精確,軟件編程更簡潔,使用新型的智能電表芯片替代了傳統的ADC和部分MCU的工作。在軟硬件設計中注重了對動態電容器的保護,實現了10分鐘保護、過流保護、缺相保護、延時保護等多種保護功能,使得系統工作更加穩定有效。

圖2 硬件結構圖
如圖2,整體電路由AD,CPU,外圍IC器件組成。使用專用測量芯片CS5460替代了原先的ADC和部分單片機的工作,通過芯片內的硬件算法得到Irms、Vrms、P。主CPU使用51系列芯片,其內部自帶20K字節的FLASHROM和512字節的RAM,設計中,全部采用其內部的程序存儲器和數據存儲器。外圍IC器件主要包括外部擴展的一片E2PROM存儲器,它擁有32K字節的存儲空間,用來存儲參數設定值及歷史數據;時鐘芯片為系統工作提供時間參考;另外,人機接口模塊選用了ZLG7289BP鍵盤顯示管理芯片。該芯片可以同時管理8個數碼管和64個按鍵,采用SPI總線接口,便于進行級聯。系統設計還有RS-232串行通訊接口,可以上傳下傳數據,進行遙控遙測。
本裝置主要是實現按實時無功來控制電容器的投切,具體軟件流程圖如3 所示 。

圖3 控制器軟件流程示意簡圖
6.1 功能實現。
軟件必須做到以下功能:采集數據并傳給CPU,然后進行算法運算并處理,發控制命令,另外還必須有顯示,通信的功能。
1) 采集調理后信號,計算出線路電壓、電流、功率因數、有功、無功。
2) 通過繼電器控制真空接觸器可按照無功的實時情況對補償電容進行合理控制。控制器還具有過壓、欠壓、過流、速斷、10Min、動作次數、缺相等保護;
3) 提供準確的時鐘,并能存儲必要的電量數據。
4) 數碼管顯示電量數據,并可通過按鍵調整參數。
5) 通過RS-232串口通信模塊實現通信。通過無線通信能調出控制器中的實時數據和歷史數據。其中歷史數據包括近兩個月的整點數據和近100次的動作記錄。
6.2 算法實現
(1) 運算算法
運算算法結構如圖4 所示。
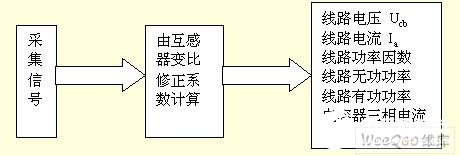
圖4
控制器只采集線路上的一個線電壓和一個相電流來對線路的電壓、電流、有功功率、無功功率以及功率因數進行計算。電壓和電流的有效值由CS5460進行硬件計算。在線路的電壓和電流都為三相對稱的情況下,系統的無功功率為Q=3UaIasinφ其中φ為功率因數角。又因為 比 超前900,幅值相差 倍,所以可得
![]()
由上式可知,只要采集Ucb和Ia,并將它們送入CS5460里,按照有功功率的方法進行計算,再乘以 ,就得到實際線路的無功功率。有了無功功率,就可以求出系統的有功功率為
![]()
角的正負由無功功率的正負來判斷,當Q》0時,φ》0,負載為感性;當Q(2) 保護算法
保護算法如圖5所示,程序按順序依次判斷是否執行各保護。其中,過流保護和過流速斷保護判斷的是電容器的電流,當電容器中任一相電流超過保護設定值時,即啟動保護。
過壓保護和欠壓保護以過壓值和欠壓值來判斷是否需要啟動保護。缺相保護是判斷當有一相電容器電流為零時,就啟動保護。當電容器進入保護狀態時,裝置推出控制。其中過流和缺相保護還設置了保護位,當保護位被人工清除時,裝置才可重新進入控制狀態。
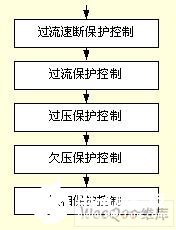
圖5 保護算法
7.結論
無功補償是電力傳輸中一個永遠的課題,從靜態補償到動態單路補償再到動態多路補償是一個必然的過程,而兩路動態補償正好可以成為單路到多路中間一道橋梁,它完全繼承了單路補償的所有優點,并且能夠實現一定精度的細補,節省成本,因此,本裝置對于現階段10Kv電網的無功補償來說,它是一套相對小成本、高效益的設備,對于農網節能降損具有相當的經濟和社會效益。
責任編輯:gt
-
電容器
+關注
關注
64文章
6727瀏覽量
103128 -
開關
+關注
關注
19文章
3284瀏覽量
95476 -
功率因數
+關注
關注
10文章
603瀏覽量
40362
發布評論請先 登錄







 工商網監
工商網監

評論