 變頻器控制電機能夠調到多大的頻率?
變頻器控制電機能夠調到多大的頻率?
變頻器控制電機的知識你了解多少?
我們都知道,變頻器是從事電氣工作所應該掌握的一種技術,使用變頻器控制電機是電氣控制中較為常見的方法;有的也要求一定要熟練運用。今天小編就以淺薄的知識整理歸納相關的知識點,內容或有重復,旨在和大家分享變頻器和電機之間的那些奇妙關系。
首先,為什么要用變頻器控制電機?
我們先簡單的了解下這兩個設備。
電機是一個感性負載,它阻礙電流的變化,在啟動的時候會產生電流的較大變化。
變頻器,是利用電力半導體器件的通斷作用將工頻電源變換為另一頻率的電能控制裝置。它主要由兩部分電路構成,一是主電路(整流模塊、電解電容和逆變模塊),二是控制電路(開關電源板、控制電路板)。
為了降低電動機的啟動電流,尤其是功率較大的電機,功率越大,啟動電流越大,過大的啟動電流會給供配電網絡帶來較大的負擔,而變頻器能夠解決這個啟動問題,讓電機平滑啟動,而不會引起啟動電流過大。
使用變頻器的另一個作用就是對電機進行調速,很多場合需要控制電機的轉速以獲得更好的生產效率,而變頻器調速一直是它最大的亮點,變頻器通過改變電源的頻率以達到控制電機轉速的目的。
變頻器控制方式都有哪些?
變頻器控制電機最常用的五種方式如下:
低壓通用變頻輸出電壓為380~650V,輸出功率為0.75~400kW,工作頻率為0~400Hz,它的主電路都采用交—直—交電路。其控制方式經歷了以下四代。
1U/f=C的正弦脈寬調制(SPWM)控制方式
其特點是控制電路結構簡單、成本較低,機械特性硬度也較好,能夠滿足一般傳動的平滑調速要求,已在產業的各個領域得到廣泛應用。但是,這種控制方式在低頻時,由于輸出電壓較低,轉矩受定子電阻壓降的影響比較顯著,使輸出最大轉矩減小。
另外,其機械特性終究沒有直流電動機硬,動態轉矩能力和靜態調速性能都還不盡如人意,且系統性能不高、控制曲線會隨負載的變化而變化,轉矩響應慢、電機轉矩利用率不高,低速時因定子電阻和逆變器死區效應的存在而性能下降,穩定性變差等。因此人們又研究出矢量控制變頻調速。
電壓空間矢量(SVPWM)控制方式
它是以三相波形整體生成效果為前提,以逼近電機氣隙的理想圓形旋轉磁場軌跡為目的,一次生成三相調制波形,以內切多邊形逼近圓的方式進行控制的。
經實踐使用后又有所改進,即引入頻率補償,能消除速度控制的誤差;通過反饋估算磁鏈幅值,消除低速時定子電阻的影響;將輸出電壓、電流閉環,以提高動態的精度和穩定度。但控制電路環節較多,且沒有引入轉矩的調節,所以系統性能沒有得到根本改善。
矢量控制(VC)方式
矢量控制變頻調速的做法是將異步電動機在三相坐標系下的定子電流Ia、Ib、Ic、通過三相-二相變換,等效成兩相靜止坐標系下的交流電流Ia1Ib1,再通過按轉子磁場定向旋轉變換,等效成同步旋轉坐標系下的直流電流Im1、It1(Im1相當于直流電動機的勵磁電流;It1相當于與轉矩成正比的電樞電流),然后模仿直流電動機的控制方法,求得直流電動機的控制量,經過相應的坐標反變換,實現對異步電動機的控制。
其實質是將交流電動機等效為直流電動機,分別對速度,磁場兩個分量進行獨立控制。通過控制轉子磁鏈,然后分解定子電流而獲得轉矩和磁場兩個分量,經坐標變換,實現正交或解耦控制。矢量控制方法的提出具有劃時代的意義。然而在實際應用中,由于轉子磁鏈難以準確觀測,系統特性受電動機參數的影響較大,且在等效直流電動機控制過程中所用矢量旋轉變換較復雜,使得實際的控制效果難以達到理想分析的結果。
直接轉矩控制(DTC)方式
1985年,德國魯爾大學的DePenbrock教授首次提出了直接轉矩控制變頻技術。該技術在很大程度上解決了上述矢量控制的不足,并以新穎的控制思想、簡潔明了的系統結構、優良的動靜態性能得到了迅速發展。
目前,該技術已成功地應用在電力機車牽引的大功率交流傳動上。直接轉矩控制直接在定子坐標系下分析交流電動機的數學模型,控制電動機的磁鏈和轉矩。它不需要將交流電動機等效為直流電動機,因而省去了矢量旋轉變換中的許多復雜計算;它不需要模仿直流電動機的控制,也不需要為解耦而簡化交流電動機的數學模型。
矩陣式交—交控制方式
VVVF變頻、矢量控制變頻、直接轉矩控制變頻都是交—直—交變頻中的一種。其共同缺點是輸入功率因數低,諧波電流大,直流電路需要大的儲能電容,再生能量又不能反饋回電網,即不能進行四象限運行。
為此,矩陣式交—交變頻應運而生。由于矩陣式交—交變頻省去了中間直流環節,從而省去了體積大、價格貴的電解電容。它能實現功率因數為l,輸入電流為正弦且能四象限運行,系統的功率密度大。該技術目前雖尚未成熟,但仍吸引著眾多的學者深入研究。其實質不是間接的控制電流、磁鏈等量,而是把轉矩直接作為被控制量來實現的。
具體方法是:
控制定子磁鏈引入定子磁鏈觀測器,實現無速度傳感器方式;
自動識別(ID)依靠精確的電機數學模型,對電機參數自動識別;
算出實際值對應定子阻抗、互感、磁飽和因素、慣量等算出實際的轉矩、定子磁鏈、轉子速度進行實時控制;
實現Band—Band控制按磁鏈和轉矩的Band—Band控制產生PWM信號,對逆變器開關狀態進行控制。
矩陣式交—交變頻具有快速的轉矩響應(<2ms),很高的速度精度(±2%,無PG反饋),高轉矩精度(<+3%);同時還具有較高的起動轉矩及高轉矩精度,尤其在低速時(包括0速度時),可輸出150%~200%轉矩。
變頻器如何控制電機?兩者如何接線?
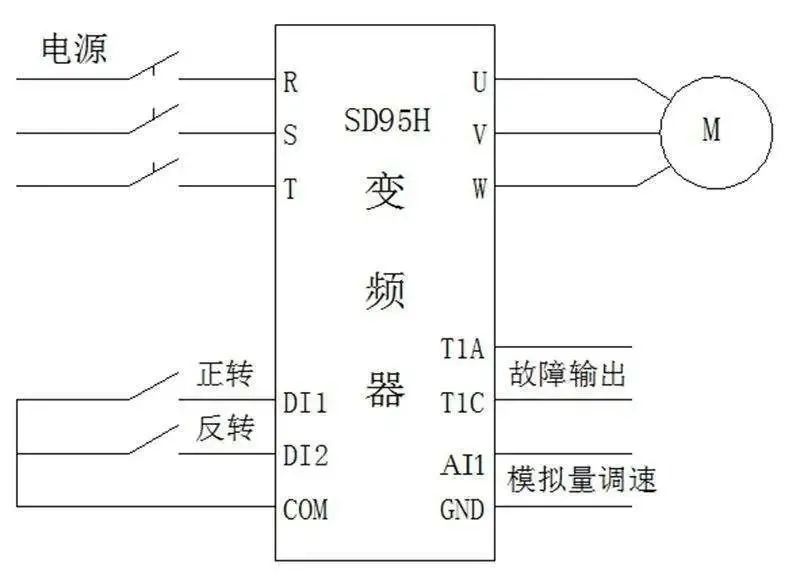
變頻器控制電機的接線較為簡單,跟接觸器的接線差不多,三根主電源進線,然后出線給電機,但是其中的設置就有說道了,控制變頻器的方式也多為不同。
首先我們來看一下變頻器的接線端子,雖然說品牌較多,接線方式也有不同,但是大部分的變頻器的接線端子也都差不太多。一般分為正反轉的開關量輸入,用來控制電機多的啟動正反轉。反饋端子,用來反饋電機的運行狀態,包括運行的頻率,轉速,故障狀態等等。速度給定控制,有些變頻器是用電位器,有的直接使用按鍵,都為不通。
通過物理接線方式來控制的,還有一種方式是走的通訊網絡,很多的變頻器現在都支持通訊控制,可以通過這個通訊線就控制電機的啟動停止,正反轉,調節速度等,同時反饋信息也通過通訊進行傳送。
當電機的旋轉速度(頻率)改變時,其輸出轉矩會怎樣?
變頻器驅動時的起動轉矩和最大轉矩要小于直接用工頻電源驅動。
電機在工頻電源供電時起動和加速沖擊很大,而當使用變頻器供電時,這些沖擊就要弱一些。工頻直接起動會產生一個大的起動起動電流。而當使用變頻器時,變頻器的輸出電壓和頻率是逐漸加到電機上的,所以電機起動電流和沖擊要小些。
通常,電機產生的轉矩要隨頻率的減小(速度降低)而減小。減小的實際數據在有的變頻器手冊中會給出說明。
通過使用磁通矢量控制的變頻器,將改善電機低速時轉矩的不足,甚至在低速區電機也可輸出足夠的轉矩。
當變頻器調速到大于50Hz頻率時,電機的輸出轉矩將降低
通常的電機是按50Hz電壓設計制造的,其額定轉矩也是在這個電壓范圍內給出的。因此在額定頻率之下的調速稱為恒轉矩調速。(T=Te,P<=Pe)
變頻器輸出頻率大于50Hz頻率時,電機產生的轉矩要以和頻率成反比的線性關系下降。
當電機以大于50Hz頻率速度運行時,電機負載的大小必須要給予考慮,以防止電機輸出轉矩的不足。
舉例,電機在100Hz時產生的轉矩大約要降低到50Hz時產生轉矩的1/2。因此在額定頻率之上的調速稱為恒功率調速.(P=Ue*Ie)
變頻器50Hz以上的應用情況
大家知道,對一個特定的電機來說,其額定電壓和額定電流是不變的。
如變頻器和電機額定值都是:15kW/380V/30A,電機可以工作在50Hz以上。
當轉速為50Hz時,變頻器的輸出電壓為380V,電流為30A。這時如果增大輸出頻率到60Hz,變頻器的最大輸出電壓電流還只能為380V/30A,很顯然輸出功率不變,所以我們稱之為恒功率調速。
這時的轉矩情況怎樣呢?
因為P=wT(w;角速度,T:轉矩),因為P不變,w增加了,所以轉矩會相應減小。
我們還可以再換一個角度來看:
電機的定子電壓U=E+I*R(I為電流,R為電子電阻,E為感應電勢)
可以看出,U,I不變時,E也不變.
而E=k*f*X(k:常數;f:頻率;X:磁通),所以當f由50-->60Hz時,X會相應減小;
對于電機來說T=K*I*X(K:常數;I:電流;X:磁通),因此轉矩T會跟著磁通X減小而減小。
同時,小于50Hz時,由于I*R很小,所以U/f=E/f不變時,磁通(X)為常數。轉矩T和電流成正比。這也就是為什么通常用變頻器的過流能力來描述其過載(轉矩)能力,并稱為恒轉矩調速(額定電流不變-->最大轉矩不變)。
結論:當變頻器輸出頻率從50Hz以上增加時,電機的輸出轉矩會減小。
其他和輸出轉矩有關的因素
發熱和散熱能力決定變頻器的輸出電流能力,從而影響變頻器的輸出轉矩能力。
載波頻率:一般變頻器所標的額定電流都是以最高載波頻率,最高環境溫度下能保證持續輸出的數值,降低載波頻率,電機的電流不會受到影響。但元器件的發熱會減小。
環境溫度:就像不會因為檢測到周圍溫度比較低時就增大變頻器保護電流值。
海拔高度:海拔高度增加,對散熱和絕緣性能都有影響。一般1000m以下可以不考慮,以上每1000米降容5%就可以了
變頻器控制電機頻率調多少合適?
在上面的整理中,我們已經了解到為什么要用變頻器控制電機,也清楚了變頻器是如何控制電機的。變頻器控制電機,總結起來無外乎這兩點:一是變頻器控制電機的啟動電壓,頻率;達到平滑啟動平滑停止;二是利用變頻器調節電機的速度,通過改變頻率進行電機的調速。
審核編輯 黃昊宇
-
電機
+關注
關注
142文章
9001瀏覽量
145337
發布評論請先 登錄
相關推薦

普通電機能當變頻電機用嗎
變頻器控制電機的正反轉與控制方式有哪些?
變頻器的頻率怎么調整?變頻器的使用條件有哪些?
AB變頻器啟動頻率怎么調
AB變頻器電機頻率,電流信號是如何傳送到plc
你了解變頻器和電機的調控應用嗎?如何處理變頻器與電機的匹配關系?






 工商網監
工商網監
評論