 基于混合ARQ技術實現多機牽引無線同步控制系統的設計
基于混合ARQ技術實現多機牽引無線同步控制系統的設計
1 引言
采用基于無線通信技術的列車控制系統,實現有效的運輸指揮及安全監控,是國際重載運輸技術的發展方向。中國大部分地區特別是山區鐵路沒有條件建立GSM—R(Global Standard for Mobile Communications—Railway)數據網絡。為了提高GSM—R網無法覆蓋地區的運輸能力,必須研制一種可靠、安全的列車無線同步控制的數據傳輸系統。混合ARQ技術是無線通信技術的研究熱點,兼顧了信息傳輸的可靠性和有效性,適用于信道惡劣條件下的無線數據傳輸,能保證機車信號傳輸的可靠性與安全性。
2 多機牽引無線同步控制系統
圖1給出多機牽引無線同步控制系統框圖。
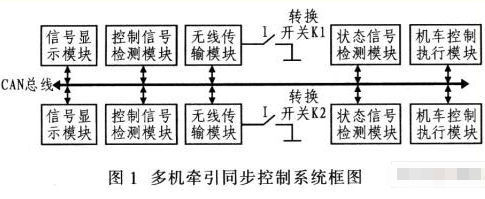
各個模塊的具體功能闡述如下。
(1)控制信號檢測模塊 當整套系統作為本務機車控制系統時,用于檢測本務機車控制信號,并把檢測到的數據通過CAN(Controller Area Network)總線發送給“主控組”和“備份組”無線傳輸模塊。
(2)狀態信號檢測模塊 不論系統處于本務還是補機控制,該模塊均用于檢測機車狀態信號,并把檢測到的數據通過CAN總線發送給“主控組”和“備份組”無線傳輸及信息顯示模塊。
(3)無線傳輸模塊采用混合ARQ數據系統。作為本務控制系統時,將數據采集模塊的數據向下發送。作為補機控制系統時,接收來自本務機車無線傳輸模塊的數據,CAN總線將檢錯通過的數據發送給“主控組”和“備份組”機車控制信號執行模塊。
(4)機車控制信號執行模塊該模塊只在系統作為補機控制時工作。通過CAN總線接收來自“主控組”和“備份組”無線傳輸模塊的數據,并比較這兩組數據,若結果一致則控制啟動相應的繼電器、D/A轉換器工作;若結果不一致則暫不動作,啟動執行模塊數據接收異常處理。
(5)信息顯示模塊 通過CAN總線接收來自無線傳輸模塊、機車控制信號執行模塊的數據,并將接收到的數據進行分析和顯示。
3 混合ARQ
3.1 混合ARQ系統模型
圖2給出系統框圖,主要由信道編解碼、收發緩沖區和發送應答控制模塊組成。發送端先對信源信息檢錯和糾錯編碼,存入發送緩沖區,通過信道將全部或部分緩沖信息以數據包形式發送。接收端接到數據包后,先緩存再進行信道譯碼、檢錯。若正確,則向發送端發送ACK應答,表明發送成功,開始發送新的數據包;否則發送NAK應答,請求重發。發送端收到重發請求,根據一定策略重發有關信息。如此往復直到解碼成功或達到預先設定的最大重傳次數。通常,混合ARQ系統傳輸的信息包包括系統信息(信源原始信息)、糾錯信息和校驗信息。

3.2 混合ARQ系統分類
由于混合ARQ系統是ARQ和FEC(forward error contro1)的結合,因此,采用不同的ARQ方案(停止_等待,Go-back—N,選擇重傳等)和不同的FEC(Turbo碼,卷積碼,線性分組碼等)相結合,便可組成不同混合ARQ系統。混合ARQ系統分類非常多,但是,如何有效地將重傳策略與前向糾錯碼的特性相結合才是最值得關心的問題。因此,在研究混合ARQ技術時,通常按照重傳策略以及相應的對于前向糾錯碼字的不同處理方式對其分類。一般來說,混合ARQ可分為:I型混合ARQ;II型混合ARQ;III型混合ARQ;基于可信度的混合ARQ。
4 系統設計
4.1 硬件設計
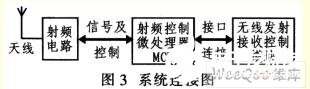
圖3為該系統連接圖。數據傳輸系統由數據傳輸模塊和無線發射接收控制模塊組成,這兩模塊通過接口電路連接。數據傳輸模塊采用STR一35工業級低功率無線數據傳輸模塊。STR一35無線數據傳輸模塊信道中心頻率為900 MHz,具有高抗干擾能力和低誤碼率;采用基于GFSK的調制方式,高效前向糾錯信道編碼技術,提高數據抗突發干擾和隨機干擾的能力。該模塊能自動過濾掉空中產生的假數據(所收即所發);接口波特率為19 200 b/s。編程靈活,用戶無需編寫多余程序,只要從接口收發數據即可。
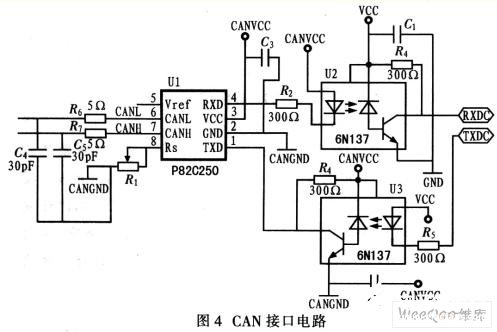
無線發射接收控制模塊采用P89C5l作為CPU,CAN總線連接系統內部各個單元模塊。P87C59l自帶CAN控制器,所以只需設計CAN接口電路,如圖4所示。設計中采用CAN總線收發器P82C250。通過不同的連接方式將P82C250的RS接地或接高電平,可使P82C250在高速、待機、斜率控制3種模式下工作。為增強CAN總線節點抗干擾能力,單片機的RXDC和TXDC并不是直接與P82C250的TXD和RXD相連,而是先通過高速光耦6N137后再與P82C250相連,這樣很好地實現總線上各CAN節點間的電氣隔離,提高節點的穩定性和安全性。
4.2 軟件設計
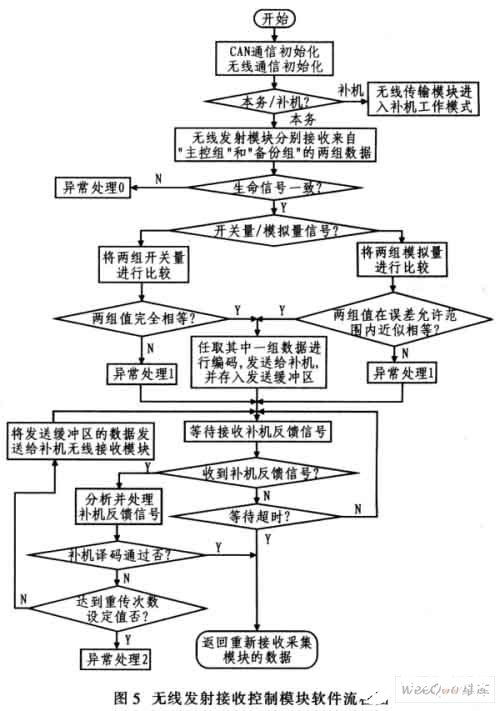
無線傳輸模塊采用半雙工工作模式,采用查詢式發送,中斷式接收。波特率為19 200 b/s。圖5為無線發射接收控制模塊軟件流程圖。
4.2.1 選擇混合ARQ系統類型
該系統設計的數據傳輸需滿足要求:①高傳輸可靠性;②低誤碼率;③滿足列車運行系統對信息吞吐量和實時性需求。I型混合ARQ系統、II型混合ARQ系統、III型混合ARQ系統、基于可信度的混合ARQ系統均滿足以上3種要求。但在信道變化慢的場合中,III型混合ARQ系統的效率低于II型混合ARQ系統;I型混合ARQ系統復雜度低,可采用各種糾錯編碼,但效率很低,在信道條件不理想時,很難適應高速數據傳輸的要求;另外,基于可信度的混合ARQ系統對反饋信道的帶寬要求高。因此,綜合考慮列車信號無線傳輸的需求及系統實現的復雜程度,多機牽引無線同步控制系統選擇II型混合ARQ作為其數據傳輸系統。
4.2.2 系統增量冗余方案
研究II型混合ARQ技術主要是尋找合適的增量冗余方案。增量冗余的基本思想是糾錯碼校驗比特只在需要重傳時才發送。重傳時是重傳信息比特還是校驗比特取決于具體采用的重傳合并方案。主要的重傳方案有交叉重傳II混合ARQ系統、多編碼速率II型混合ARQ系統等。在交叉重傳的II型混合ARQ系統方案中,重傳過程是信息比特和校驗比特的交叉重傳。多編碼速率II型混合ARQ系統的典型代表是基于碼率兼容刪除卷積碼(Rate一Compatible Punctured Convolutional codes,RCPC codes)和碼率兼容刪除Turbo碼(Rate一Compatible Punctured Turbo Codes,RCPT codes),通過改變刪余周期,可以獲得各種所需編碼速率,速率兼容的刪余矩陣,一般都是通過計算機搜索得到。
多機牽引無線同步控制的混合ARQ系統數據傳輸系統可按需要選擇不同的增量冗余方案。RCPC碼和RCPT碼是應用廣泛的速率兼容碼,卷積碼和Turbo碼是較成熟的編解碼算法,建議多采用RCPC_ARQ或RCPT_ARQ方案。
4.2.3 重傳次數的設定
機車信號的傳輸要求具有時效性,重傳次數的增多必然增加時延,對機車的同步操作帶來不良后果。因此,必須對重傳次數加以嚴格控制。一般重載列車的運行速度為40~80km/h,為了滿足對運行的列車控制,通常選擇控制周期為200~600 ms,在200 ms內所造成的距離誤差分別是2.22 m和4.44 m,在控制允許范圍之內。重傳次數應根據所需傳遞的信息量設定,并通過多次試驗確定。
4.2.4 存在的問題
由于鐵路沿線無線傳輸信道條件十分惡劣,且信號的重傳次數有嚴格限制,可能在達到重傳次數的上限時,接收端的信號仍然未能檢錯通過。其次,混合ARQ系統在發送端和接收端都需要較大的緩沖區,增加硬件成本。其接收端信號的檢錯、糾錯及合并延時較多。因此,要尋找并綜合運用其他無線電抗干擾措施,減少誤碼率,提高檢錯通過率,在多次重傳仍未通過時,要啟動異常處理措施。同時需要改進編碼技術,簡化算法,減少延時。
5 結語
隨著無線通訊技術和編碼技術的發展,混合ARQ技術將不斷改進與創新,混合ARQ數據傳輸系統的可靠性與安全性得到進一步提高,為多機牽引無線同步控制系統的數據傳輸提供有力保障,從而實現從機的安全無人駕駛。
責任編輯:gt
-
控制系統
+關注
關注
41文章
6604瀏覽量
110576 -
CAN總線
+關注
關注
145文章
1946瀏覽量
130727 -
無線通信
+關注
關注
58文章
4564瀏覽量
143496
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論