 采用Java技術和Java 3D虛擬現實技術實現設備遠程監控系統的設計
采用Java技術和Java 3D虛擬現實技術實現設備遠程監控系統的設計
作者:程立輝,劉大成,金小偉,鄭力
設備的遠程監控是制造系統遠程監控中的重要組成部分,包括對設備的運行進行監視和控制,對設備可能出現的故障進行預測,對設備已經出現的故障進行診斷等內容。
圖形圖像信息是人類認識世界、掌握知識的重要方法。資料表明人類從外界所獲得知識,其中80%以上來自圖形圖像以及聲音信息。因而在遠程監控系統設計中,特別是面向設備監控中,較多地包含圖形圖像信息以及聲音信息,包括現場的視頻信息以及將各種傳感器信息轉換成比較容易識別的圖形信息。
然而,由于圖形圖像等視頻信息和音頻信息的數據量非常大,嚴重阻礙了具有海量數據的信息在遠程監控系統中的使用,特別是在基于Intranet/Internet的遠程監控系統中的應用。因此,如何在只有較少信息量傳輸的情況下實現以視頻和音頻等多媒體信息為主要呈現方式的遠程監控系統成為遠程監控系統實現的主要原因之一。
本研究采用了傳感器驅動的虛擬現實輔助監控的方法。虛擬現實技術是指綜合利用計算機圖形系統和各種現實及控制等接口設備,在計算機上生成的、可交互的三維環境技術,具有沉浸(Immersion)、交互(Interaction)和構想(Imagination)等三個基本特征。但由于這樣的系統造價高昂,操作復雜,尚無法在普通的工作環境中得到應用。目前虛擬現實的含義有所拓寬,即使用半沉浸和非沉浸技術,通過顯示器對三維物體進行瀏覽的系統同樣可以被稱為虛擬現實系統,從而在更大的范圍中普及和應用虛擬現實技術。
JAVA 3D是Java語言在三維圖形領域的擴展,是一組API(Application Programming Interface),可以創建基于Web的、與互聯網結合的三維交互環境的場景。用戶通過使用帶有插件的普通瀏覽器,便可以觀賞到由Java 3D創建的三維虛擬現實。由于Java 3D易于實現、適合網絡傳輸,交互性好等特點,因此,對建立基于Web的三維可視化交互式應用提供了一種很好的解決方案。
1、基于虛擬現實的設備遠程監控系統
如圖1所示,虛擬現實輔助實現的設備遠程監控系統可采用服務器/瀏覽器的模式。系統采用Java技術和Java 3D API虛擬現實技術實現。這主要是考慮到Java程序運行與操作系統無關的特性。遠程監控系統主要分為客戶端、服務器以及現場設備等3個層次。
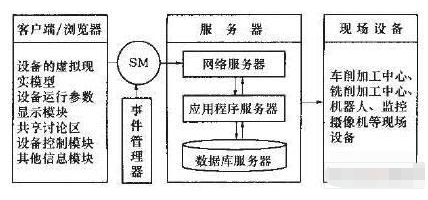
圖1 基于虛擬現時的設備遠程監控系統
1.1 客戶端設計
客戶端采用增加插件的通用網頁瀏覽器,它是監控系統用戶的工作界面。頁面主要包括設備的三維模型、設備運行參數顯示、設備控制、共享討論區等模塊。
當用戶經過身份驗證進入監控系統后,用戶選擇所要監控的設備。這時,頁面將顯示用戶所選設備的三維虛擬圖像以及設備運行的相關信息。本文中,我們實現了抓取機器人的瀏覽器監控畫面。
1.2 服務器設計
服務器主要包括網絡服務器、應用程序服務器以及數據庫服務器等。網絡服務器主要負責相關的發布,網絡通訊的安全等方面的內容。應用程序服務器主要負責以下工作:①采集現場設備的多種傳感器信息,并將信息一方面存儲在數據庫中,另一方面通過網絡服務器發布;②獲取從網絡服務器得到的相關設備的控制信息,經過分析確認后對現場設備進行控制;③從數據庫服務器中查詢設備的歷史信息,實現設備歷史運行的再現。數據庫服務器主要存儲設備監控的歷史信息、設備的三維模型數據等內容。
1.3 現場設備
現場設備是指那些現場存在的、需要實現遠程監控的設備以及其他相關設備。現場設備與服務器之間的通訊主要取決于設備本身的通訊能力。對于具有網絡通訊能力的設備,主要采用網絡通訊手段,應用TCP/UDP等技術;對于沒有網絡通訊能力,但具有計算機串并口通訊能力的設備采用計算機串并口通訊技術實現通訊;對于不具備以上兩種通訊能力的設備,可以考慮采用開發單片機等方法實現通訊。
2、JAVA 3D模型
JAVA 3D是Java語言在三維圖形領域的擴展,是一組API,即應用編程接口。本文利用Java 3D提供的API,構造了傳感器數據實時驅動的機器人運動的三維模擬軟件。
Java 3D的場景圖是DAG圖(Directed-acyclic Graph),類似于一種樹形結構,上面的分枝并不對稱,其中每一個節點均為對象,稱為節點(Node)。不管什么節點,都是Java 3D類的實例,節點之間的連線則代表對象之間的父子或引用關系。見圖2。
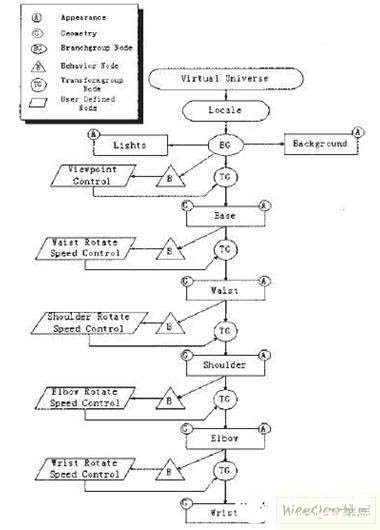
圖2 機器人的三維場景圖結構
Java 3D的場景圖中,最底層(根部)的節點是Virtual Universe,每一個場景圖只能有一個Virtual Universe,就像一棵大樹的根。Virtual Universe的上面是Locale節點,每個程序可以有一個或多個Locale,但只能有一個Locale處于顯示狀態。絕大部分程序都只有一個Locale。每一個Locale上面擁有一個到多個BranchGroup節點。一般說來,要想建立三維應用環境,必須定義所需要的形體(Shape),給出形體的外觀(Appearance)及幾何信息(Geometry),再把它們擺放在合適的位置。這些形體及其擺放位置都是由相應的節點給出的,他們必須擺放在BranchGroup節點上面,擺放的具體位置由節點TransformGroup設定。另外,擺放好三維形體之后,還需要設定具體的觀察位置及觀察參數如視角。完成了這些工作,就算完成了三維場景圖的建立。
在虛擬現實輔助的設備遠程監控系統的設備監控畫面中,Reset、Move Up、Move Down、Move Right、Move Left、Zoom In、Zoom Out等功能鍵的作用分別表示控制虛擬三維物體恢復到系統默認視角、俯視、仰視、左視、右視、虛擬物體放大、虛擬物體縮小等功能。功能按鈕旁邊的綠色顯示標志表示設備目前運行正常,如果設備的運行出現異常甚至發生故障時,顯示標志將分別顯示橙色和紅色。在虛擬視窗下面的SelectMode下拉列表中可以選擇設備的運行方式,包括實時的設備監視、設備運行狀態的歷史回顧以及設備的遠程控制方式。Robot Procedure File的功能是當機器人的工作方式選擇為控制方式時,通過發送控制命令文件實現設備的遠程控制。監控頁面的右上部分的Select Sensor和Sensor Data組合起來,為用戶查詢各種傳感器信息提供了方便。頁面右下角的Chat Room為設備監控的共享討論區,為系統用戶提供了方便的交互手段。
3、結 語
采用虛擬現實輔助的設備遠程監控系統為用戶提供了非常方便的設備監控平臺。綜合采用Java技術和Java 3D虛擬現實技術,首先可以實現監控系統的跨平臺運行;其次,通過采用設備傳感器驅動的Java 3D虛擬現實模型的方法,一方面實現了設備運行狀態和運行信息的圖形圖像化描述,另一方面由于通訊網絡中傳輸的只是設備相關的各種傳感器信息,與圖形圖像信息相比較,所需傳輸的信息量大大減少。
責任編輯:gt
-
監控系統
+關注
關注
21文章
3930瀏覽量
175387 -
JAVA
+關注
關注
19文章
2972瀏覽量
104858 -
虛擬現實
+關注
關注
15文章
2289瀏覽量
95506
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論