


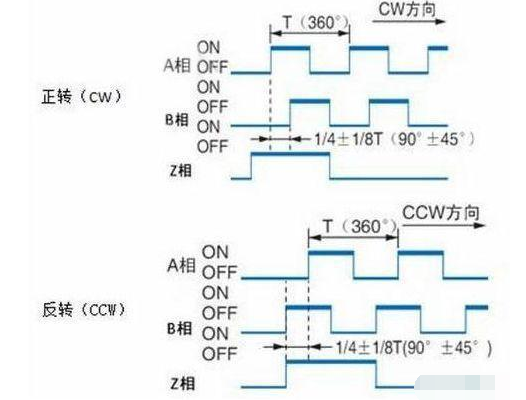
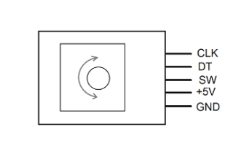
旋轉編碼器常應用于角度定位或測量時,通常有A、B、Z三相輸出。A相和B相輸出占空比為50%且相位差為90度的方波。當編碼器正向旋轉時,A相比B相超前四分之一個周期;當編碼器反向旋轉時,B相比A相超前四分之一個周期。編碼器每轉一周,Z相輸出一個脈沖。由于編碼器每轉一周,A相和B相輸出固定數目的脈沖,則A相或B相每輸出一個脈沖,表示編碼器旋轉了一個固定的角度。當Z相輸出一個脈沖時,表示編碼器旋轉了一周。因此旋轉編碼器可以測量角位移及位移方向。
當然,不同型號的旋轉編碼器,其輸出脈沖的相數也不同,有的旋轉編碼器輸出A、B、Z三相脈沖,有的只有A、B相兩相,最簡單的只有A相。
A和B輸出波形為
通過輸出波形圖可知每個運動周期的時序為
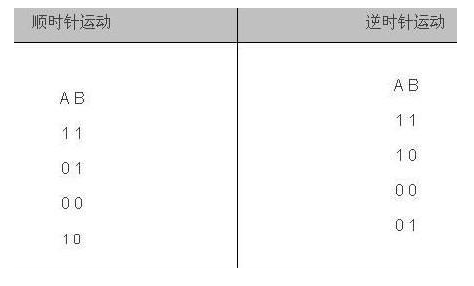
靜止狀態為11或00
單片機可利用定時器中斷來檢測A和B的狀態,中斷時間在5~20ms之間均可。
當檢測到A^B= 0時,表示為靜止狀態,記下A和B的狀態。
當檢測到A^B= 1時,表示有轉動,讀取AB的狀態,如果AB是從11到01或者是
從00到10則為正轉,反之如果AB是從11到10或者是從00到01則為反轉。
此方法比較簡單可靠,可以檢測轉動一格又可以檢測快速轉動。
責任編輯人:CC
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
編碼器
+關注
關注
45文章
3808瀏覽量
138046 -
旋轉編碼器
+關注
關注
5文章
160瀏覽量
26348
發布評論請先 登錄
相關推薦
熱點推薦
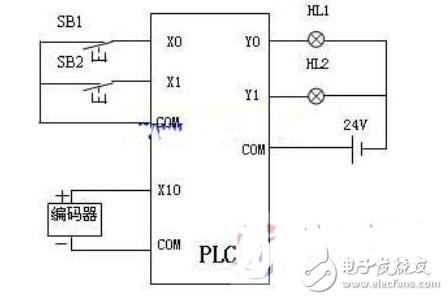
旋轉編碼器參數_旋轉編碼器與plc連接
本文主要介紹了旋轉編碼器參數以及與plc的連接方法。在我們選擇旋轉編碼器的時候會有一些專業術語的參數,這些專業術語是什么含義呢?我們來了解
發表于 08-06 11:24
?5925次閱讀
旋轉編碼器是什么,它的優勢都有哪些
上應用較多。 旋轉編碼器有以下的優勢 經濟,關于多個操控工位,只需一個編碼器的本錢,以及更首要的裝置、保護、損耗本錢下降,使用壽命增加,其經濟化逐步突顯出來。 信息化,除了定位,操控室
發表于 12-02 17:34
?5092次閱讀

旋轉編碼器的常見類型
在工業自動化和精密測量領域中,旋轉編碼器是一種不可或缺的設備。它能夠將旋轉位置或旋轉量轉換成模擬或數字信號,為控制系統提供精確的位置和速度信
帶Arduino的旋轉編碼器設計 旋轉編碼器的工作原理和特點
旋轉編碼器(Rotary Encoder),也稱為軸編碼器,是一種將旋轉的機械位移量轉換為電氣信號的傳感





 工商網監
工商網監

評論