 基于控制局域網總線技術實現船用張緊器驅動監控系統的設計
基于控制局域網總線技術實現船用張緊器驅動監控系統的設計
鋪管船用張緊器是海底油氣管道鋪設的關鍵配套設備,由夾緊系統、驅動系統、監控系統組成,我國從上世紀 90年代開始鋪管船用張緊器的研究, 1998年完成勝利油田灘海鋪管船用張緊器項目,2007年開始深水鋪管張緊器的研究。張緊器驅動系統由上下兩套履帶驅動系統組成,在灘海鋪管船用張緊器中,采用上下兩履帶各用兩個液壓馬達驅動的方式來輸送管線,但深水鋪管的張緊力遠遠大于灘海鋪管所需的張緊力,若采用液壓馬達驅動,則進出油管直徑較大,由泵站到馬達的管路設計、布置難度大。相對而言,電機安裝方便、控制方式簡單,所以采用四個交流伺服電機代替液壓馬達驅動張緊器。張緊器在工作過程中上下履帶同步運動,并確保管線的張力在一定范圍內,這就要求監控系統對交流伺服電機的控制信號具有實時性強、同步性好的特點,同時,鋪管船總控制室與張緊器距離約 150m,要求監控系統在信號傳輸過程中有良好的抗干擾能力。本文通過分析 CAN總線特點,將 CAN總線技術應用于張緊器驅動監控系統中。 CAN總線技術為張緊器驅動監控系統提供了一個實時可靠的信息交互網絡,解決了傳統 I/O模塊多,干擾嚴重、系統軟件復雜、硬件兼容性差等問題,提高了信號傳輸實時性和可靠性, 便于安裝、調試和維護。
1 CAN總線的特點及應用
CAN作為一種串行總線, 特別適用于含有一群智能設備的系統或子系統中,總線上任一個節點均可在任一時刻主動向網絡上的其他節點發送數據,而從不分主從,通信靈活,總線上的節點可分為不同的優先級,可以滿足不同的實時要求。采用非破壞性總線仲裁,當兩節點同時向總線發送信息時,優先級低的節點主動停止數據發送,而優先級高的節點可不受影響地繼續發送數據。具有實時性強、可靠性高、通信速率快、結構簡單、互操作性好、總線協議具有完善的錯誤處理機制、靈活性高和價格低廉等特點,在工業測控和工業自動化等領域有很大的應用前景。
在歐美等國,CAN總線已被廣泛地應用于汽車、火車、輪船、機器人、智能樓宇、機械制造、數控機床、各種機械設備、交通管理、傳感器、自動化儀表等領域。
在國內,CAN總線技術被大量地應用于工農業監控、電廠測控、火災報警、變電站控制、煤炭綜合監控等。 2張緊器驅動監控系統
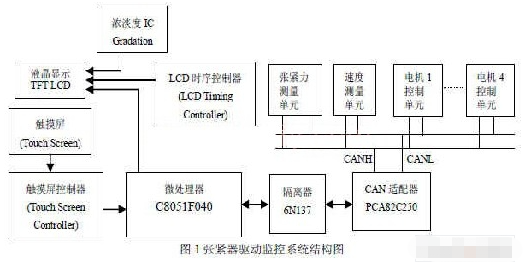
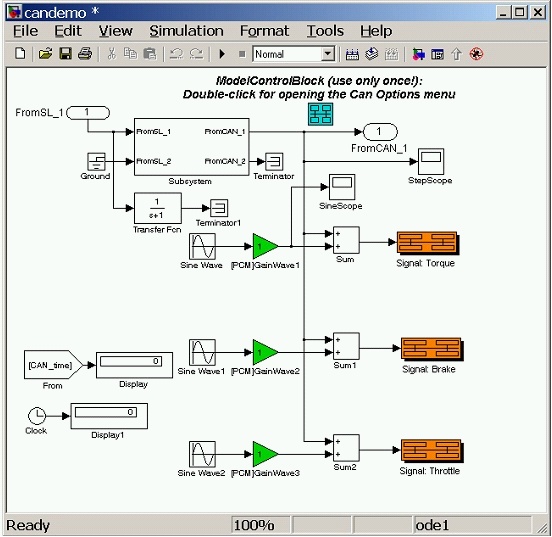
電機驅動上、下履帶運動,在摩擦力的作用下拖動管線運動,正常鋪管速度為 30m/min,但在鋪管過程中,受風浪影響,當船上升時,管線將承受很大拉力,當拉力超過昀大許用拉力值 Fmax時,造成管線破壞或使鋪管船定位錨走錨造成事故;當船下降時,管線承受拉力減小,若拉力值小于昀小拉力值 Fmin時,管線將承受很大彎曲應力,該應力將超過管線材料的屈服極限,從而引起管線產生塑性變形。這就要求管線在鋪設過程中受張緊力 F范圍為: Fmin驅動監控系統對電機的監控為實時過程,通過采集張緊力、電機轉速等信息,實時控制電機的運行,且四個交流伺服電機具有良好的同步性。監控系統結構如圖 1所示
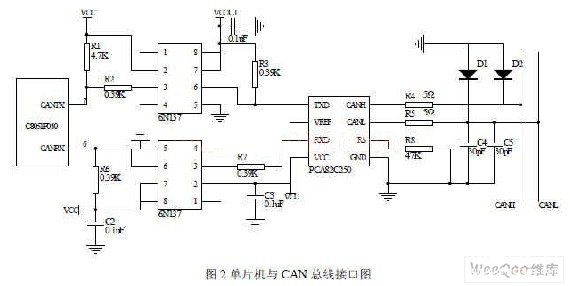
單片機與 CAN總線連接方式有兩種:片外連接和片內集成。傳統的方式是將 CPU與 CAN總線控制器和總線收發器相連后再接入總線網絡,這樣使 CPU外圍電路復雜化,整個系統受外部影響較大。因此本系統選用其中以 Silicon Laboratories公司的 C8051F040型單片機,它在一塊芯片上集成了 64KB Flash、4352B RAM、CAN控制器 2.0、2個串行接口、 5個 16位定時器、 12位 A/D轉換器、8位 A/D轉換器及 12位 D/A轉換器等。為進一步提高系統的抗干擾能力,在 CAN控制器引腳 CANTX、CANRX和收發器 PCA82C250之間并不是直接相連,而是通過由高速光耦 6N137構成隔離電路后再與 PCA82C250相連[9],這樣可以很好的實現總線上各節點的電氣隔離。
為保護 PCA82C250免受過電流沖擊,在其 CANH和 CANL引腳各自通過一個 5?的限流電阻與 CAN總線相連,在 CANH和 CANL與地之間各聯一個瞬態電壓抑制二極管。為防止總線上的高頻干擾和電磁輻射,CANH和 CANL與地之間各自接一個 30pF濾波電容。硬件接口電路如圖 2所示。此外,操作員通過觸摸屏幕設置參數,通過 LCD顯示器監視系統各個參數。電機控制單元采用:單片機—變頻器—交流伺服電機的控制方式,信號通過 CAN總線對變頻器進行控制進而控制電機的運行狀況。
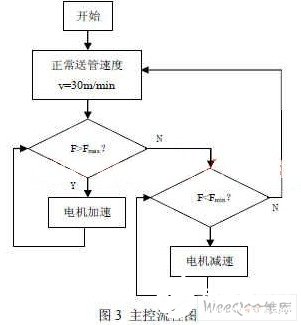
CAN通信軟件設計張緊器驅動監控系統整個監控過程為實時采集電機轉速信息、張緊力F的大小,若F》Fmax則電機加速送管;若F
開始
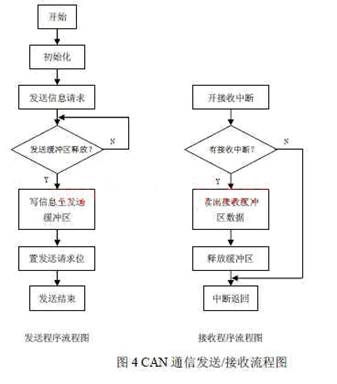
由主控流程圖可以看出,軟件設計的關鍵在于采集速度、張緊力的值和發送控制信號,所以,基于CAN的通信至關重要。 CAN通信系統的軟件設計包括系統初始化、發送程序、接收程序。在完成對所有報文對象初始化后,程序進入發送/接收階段。CAN報文的發送是個自動過程,由CAN控制器自動完成。用戶只需要根據接收到的遠程幀的識別符,將對應的數據轉移到發送緩沖寄存器,然后將此報文對象的編碼命令請求寄存器啟動發送即可。發送程序結構如圖4所示。
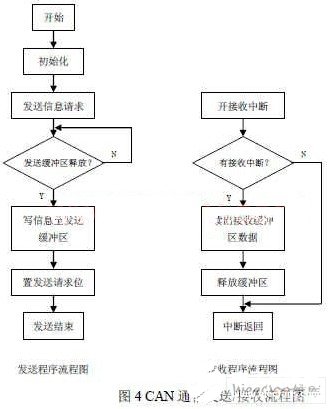
CAN報文的接收也是由CAN控制器自動完成,當接收到發送完標志位后,程序從接收緩沖器中讀取接收的數據。為提高系統運行效率,接收過程采用中斷的方式實現。接收程序結構如圖4所示。
4 結論
深水鋪管張緊器工作條件惡劣,外部環境易對監控系統信號造成干擾,本文將CAN總線技術運用于船用張緊器驅動監控系統中,重點介紹系統設計方案、CAN與單片機硬件接口設計、軟件設計等內容。解決了傳統電機控制方式中實時性差、響應時間長、多電機控制同步性差、信號傳輸抗干擾能力差的缺點,保證了張緊器對管線實現恒張力控制。 文章創新點:將控制局域網(CAN)總線應用海洋鋪管張緊器這種工作條件惡劣、但對系統穩定性要求高的場合,組成具有總線式網絡拓撲結構的分布式監控系統,克服了傳統控制方式中實時性差、多電機工作同步性差、信號傳輸抗干擾能力差的缺點,為張緊器可靠工作提供了保證。
責任編輯:gt
-
單片機
+關注
關注
6035文章
44554瀏覽量
634653 -
CAN
+關注
關注
57文章
2744瀏覽量
463622 -
監控系統
+關注
關注
21文章
3904瀏覽量
174427
發布評論請先 登錄
相關推薦
控制器局域網總線技術(Controller Area Network-BUS)
嵌人式系統的無線局域網接入怎么實現?
無線局域網(WLAN)是什么?
控制器局域網CAN
ExpertControl的CANbus(控制器局域網)專用
如何使用LabVIEW進行局域網動態加密遠程監控系統的設計





 工商網監
工商網監
評論