 KUKA C4機器人的軌跡BASE與TOOL坐標
KUKA C4機器人的軌跡BASE與TOOL坐標
在工業機器人的操作、編程和調試時坐標系具有重要的意義。在機器人控制系統中定義了下列坐標系:
ROBROOT
機器人足部坐標系
固定位于機器人足部。
是機器人的原點。
是世界坐標系的參照點。
WORLD
世界坐標系
在供貨狀態下與ROBROOT坐標系中一致。
可以從機器人足部 “ 向外移出 ”。
說明世界坐標系在ROBROOT坐標系中的位置。
此外,機器人系統為壁裝與吊頂安裝時使用。
BASE
基坐標系
是一個可自由定義、用戶定制的坐標系說明基坐標在世界坐標系中的位置。用于測量工件和裝置。位置在congfig.dat
例如:DECL FRAMEBASE_DATA[32]
BASE_DATA[1]={X 2497.67993,Y -82.7900009,Z 1138.84998,A90.0410004,B -0.0939999968,C -0.0610000007}
說明BASE1是相對world坐標計算出來。
FLANGE
法蘭坐標系
法蘭坐標系固定位于機器人法蘭上。
原點為機器人法蘭中心。
是工具坐標系的參照點。
TOOL
工具坐標系
是一個可自由定義、用戶定制的坐標系。
TOOL 坐標系的原點被稱為 TCP - Tool Center Point,即工具中心點。
用于測量工具。
例如: 位置在congfig.dat :DECL FRAME TOOL_DATA[32]
TOOL_DATA[1]={X 33.7000008,Y -311.0,Z 304.0,A -90.0,B0.0,C -90.0}
說明tool1是相對法蘭坐標計算出來。
例如機器人在執行軌跡程序時,使用兩個坐標,1個tool ,1個BASE坐標。
從Dat文件上看每個軌跡點分兩部分(在此以大眾標準為例)
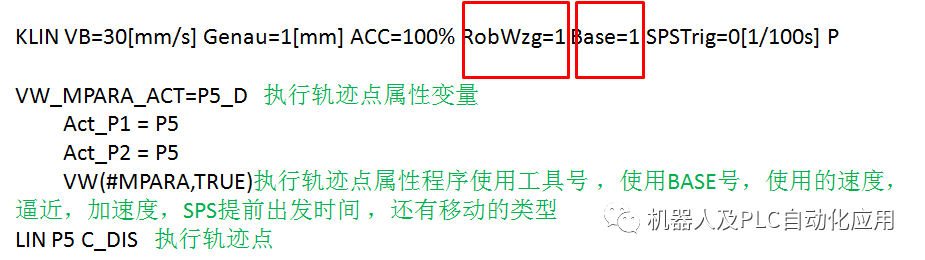
1.使用工具號,使用BASE號,使用的速度,逼近,加速度,SPS提前出發時間 ,還有移動的類型 :KLIN#GLUE_MOTION
DECL VW_MPARA_TYP P5_D = {TOOL_NO 1,BASE_NO 1,VB 30,VE 1,ACC 100,TRG_TIME0,MOVE_TYPE #GLUE_MOTION}
2.P5點的坐標值
DECL E6POS P5 = {X 952.3254, Y 597.7797, Z 1142.121, A-18.13582, B 23.29328, C -30.74332, S 6, T 59 , E1 -0.001224949, E2 0.0, E30.0, E4 0.0, E5 0.0, E6 0.0}
在機器人移動過程中每個軌跡點的空間坐標都是以機器人的BASE坐標確定的,而它的姿態是通過TOOL坐標換算`出來的 。
空間上機器人的XYZ坐標是以BASE坐標為零點計算出來的。
如果機器人移動到設定的BASE點時那么它該點的坐標X,Y,Z,值都應該是0。
那么為什么我們改變工具坐標的XYZ后,軌跡點不能按照我們的意愿去偏移呢?
這是因為機器人算法的關系!C 4機器人的軌跡算法決定了偏移的坐標.
例如:如果你的工具在tooL坐標的X方向上偏了10mm
我們通過KUKA計算器或著運算程序可以得出:這個X向的偏差可以使工具坐標的X偏移9.848,Y方向偏移1.736A旋轉10.0這就偏差的換算。表面上是工具的X方向 偏差,但是如果你想消除這個偏差你需要改變TOOL坐標的X,Y,和A來實現。
在這里我是真的要感謝OrangeEdit.Fee這個軟件,它總是在我遇到難題時給與我無私的幫助!和靈感!
責任編輯:xj
原文標題:KUKA C4機器人軌跡BASE與TOOL坐標淺談
文章出處:【微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
-
機器人
+關注
關注
211文章
28380瀏覽量
206916 -
Tool
+關注
關注
0文章
133瀏覽量
12103 -
KUKA
+關注
關注
3文章
217瀏覽量
16516
原文標題:KUKA C4機器人軌跡BASE與TOOL坐標淺談
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
【「具身智能機器人系統」閱讀體驗】+初品的體驗
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
焊接機器人拖拽軌跡怎么設置

工業機器人控制器的主要功能有哪些
abb機器人工具坐標系問題
ROS讓機器人開發更便捷,基于RK3568J+Debian系統發布!
Al大模型機器人
abb機器人常用指令大全
工業機器人仿真軟件有哪些

基于FPGA EtherCAT的六自由度機器人視覺伺服控制設計
基于飛凌嵌入式RK3568J核心板的工業機器人控制器應用方案
KUKA C4/C58.6以上系統的工具/基坐標管理窗口






 工商網監
工商網監
評論