") 科學(xué)家提出的新型混合系統(tǒng),可顯著提升多任務(wù)處理能力
科學(xué)家提出的新型混合系統(tǒng),可顯著提升多任務(wù)處理能力
當(dāng)前,大多數(shù)可移動機器人的功能都還處于很初級的階段,對它們而言,要想足夠智能地完成某些工作依然是一個嚴(yán)峻的挑戰(zhàn)。如何為機器人設(shè)計一種類似“人腦”的大腦結(jié)構(gòu),來提升其智能化程度,一直是近年來的研究熱點。
實際上,“類人機器人”的想法早在 40 年前就已經(jīng)提出——模仿人腦的運轉(zhuǎn)分工,即使用互補的兩個腦結(jié)構(gòu),大腦(或前腦 cerebrum)負(fù)責(zé)視覺、聽覺和思維等更高層次的認(rèn)知功能,而小腦(cerebellum)則負(fù)責(zé)整合感官數(shù)據(jù)并控制運動、平衡和身體姿勢。但是,在這一想法最初提出時,對應(yīng)的機器人技術(shù)還尚未實現(xiàn)。
近日,一篇發(fā)表于《科學(xué)機器人》(Science Robotics)的論文就詳細(xì)描述了一種混合系統(tǒng),該系統(tǒng)將控制運動的模擬電路和控制感知和決策的數(shù)字電路結(jié)合起來,不僅顯著降低了系統(tǒng)能耗,還提升了機器精度和計算效率。
研究人員表示,通過模擬大腦和小腦之間的協(xié)作,機器人可以在延遲、功耗更低的情況下,同時執(zhí)行多個任務(wù)。
混合系統(tǒng)的關(guān)鍵——憶阻器
我們知道,機器人要想在動態(tài)環(huán)境中控制機體,需要具備極強的處理能力,這既需要有一個超大的芯片空間,又需要有足夠多的電量來維持續(xù)航。同時,機器人在實時控制中,需要快速獲取和處理感官信息,從而可以對不斷變化的環(huán)境條件做出快速反應(yīng)。
傳統(tǒng)上,機器人的控制能力主要是依靠純數(shù)字方法來實現(xiàn),但這類數(shù)字化系統(tǒng)會導(dǎo)致高延遲和高功耗。
而在此次工作中,為使機器人可以適應(yīng)環(huán)境變化,研究人員通過利用憶阻器(即記憶器件和電阻器件的結(jié)合體)的可重構(gòu)性(可編程導(dǎo)電性)來實現(xiàn)機器人運動控制。他們使用憶阻器構(gòu)建了一個模擬電路,該電路下的一種算法負(fù)責(zé)集成來自機器人的加速度計和陀螺儀的數(shù)據(jù)。
憶阻器是一個雙端裝置,其電阻取決于先前的輸入。這種電阻存儲器效應(yīng)是非易失性的,這就意味著即使當(dāng)電流被移除時,它的電導(dǎo)狀態(tài)也會保留,從而產(chǎn)生電阻隨機存取存儲器(RRAM)。
結(jié)果顯示,這種方法顯著減少了計算時間,從而使機器人控制具有更高的精度和速度成為可能。
此外,可編程電阻性還有額外的好處,即允許計算和內(nèi)存處于相同的物理位置(這種方法也與人腦處理信息的方法類似),控制系統(tǒng)的計算效率因此得以提高。而且,它幾乎不會因為器件的變化而受影響,同時還具有較高的耐損性和較長的壽命。
研究人員在實驗中只使用兩個憶阻器。第一個憶阻器用于模擬濾波器來去除會導(dǎo)致機器人不穩(wěn)定的傳感器信號噪聲,然后運動控制器接收濾波后的傳感器信號,并使用第二個憶阻器來控制機器人。為了優(yōu)化第二個憶阻器的導(dǎo)電性,同時使系統(tǒng)能夠?qū)ξ粗筒豢深A(yù)測的情況作出即時反應(yīng),研究人員在隨機搜索算法的基礎(chǔ)上,通過一個適應(yīng)性的學(xué)習(xí)過程,實現(xiàn)了一種無模型的方法來優(yōu)化系統(tǒng)參數(shù)。
由于濾波器和控制函數(shù)的計算是在模擬域中進行的,因此不需要額外的模數(shù)轉(zhuǎn)換器或數(shù)模轉(zhuǎn)換器,這就大大降低了系統(tǒng)功耗、減少了處理時間和整體電路面積與成本,同時由于量化噪聲的降低,精度也得以提高。此外,這些功能背后的計算并不發(fā)生在系統(tǒng)的數(shù)字域,因此減少了其計算負(fù)荷。
混合系統(tǒng)的局限性與展望
研究人員在移動倒立擺機器人上實現(xiàn)了他們的混合信號控制器。這個裝置看起來大致像一根平衡放于兩個輪子上的桿,從懸浮板到倉儲物流,這種簡單機器人有著非常廣泛的應(yīng)用場景,波士頓動力公司(Boston Dynamics)最近推出的手臂機器人也基于這種模型進行操作。
與標(biāo)準(zhǔn)的全數(shù)字系統(tǒng)相比,這種模擬信號系統(tǒng)的處理速度要快一個數(shù)量級,并且能效更高。這不僅使其可以降低原來的電力需求,而且還可以將處理環(huán)路耗時從 3000 微秒減少到 6 微秒。這顯著提高了機器人的穩(wěn)定性,原本如果只使用數(shù)字平臺,機器人完成單個任務(wù)需要耗費3秒多時間,現(xiàn)在則只需1秒就能完成并穩(wěn)定下來。
除了憶阻器外,該混合系統(tǒng)的其余部件均可通過商用電子元件實現(xiàn)。這將使類似的機器人運動控制器可以與更小、更輕的機器人結(jié)合在一起使用,使得它們以更高的能效和更快的速度響應(yīng)不斷變化的環(huán)境。
不過,研究人員也表示,這僅僅是當(dāng)前在概念上的證明。他們建造的機器人體積小而且只具有基本形態(tài),在模擬電路上運行的算法也相對簡單。但是,可以確定的是,這一概念證明是非常具有前景的,目前已有大量研發(fā)投入到神經(jīng)形態(tài)和基于憶阻器的模擬計算硬件之中。
正如研究人員所說:“通過模擬人腦的大腦和小腦的協(xié)作,機器人明顯可以同時執(zhí)行多個任務(wù),而且等待時間更短,功耗更低。” 畢竟到目前為止,“人腦”是科學(xué)家們發(fā)現(xiàn)的最佳計算模型。
審核編輯 黃昊宇
-
機器人
+關(guān)注
關(guān)注
211文章
28632瀏覽量
207989 -
任務(wù)處理
+關(guān)注
關(guān)注
0文章
2瀏覽量
5332
發(fā)布評論請先 登錄
相關(guān)推薦
深開鴻亮相“小小科學(xué)家”品牌發(fā)布暨科學(xué)探索研學(xué)營開營活動

西湖大學(xué):科學(xué)家+AI,科研新范式的樣本

混合部署 | 在迅為RK3568上同時部署RT-Thread和Linux系統(tǒng)
AI for Science:人工智能驅(qū)動科學(xué)創(chuàng)新》第4章-AI與生命科學(xué)讀后感
《AI for Science:人工智能驅(qū)動科學(xué)創(chuàng)新》第一章人工智能驅(qū)動的科學(xué)創(chuàng)新學(xué)習(xí)心得
混合部署 | 在迅為RK3568上同時部署RT-Thread和Linux系統(tǒng)
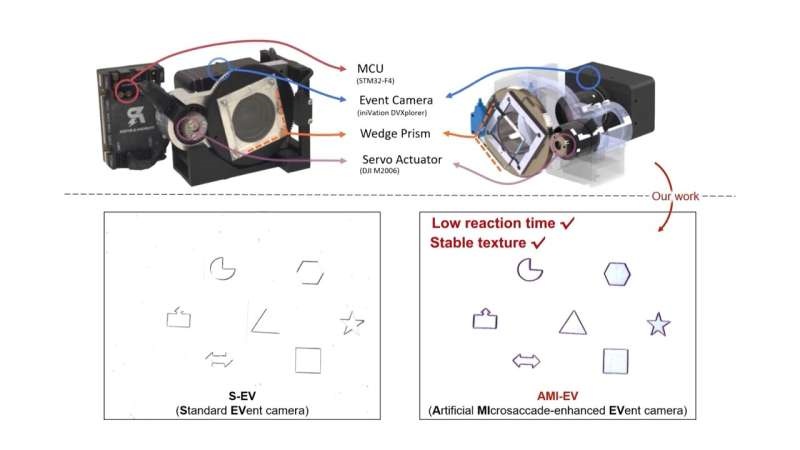
受人眼啟發(fā)!科學(xué)家開發(fā)出新型改良相機
中國科學(xué)家發(fā)現(xiàn)新型高溫超導(dǎo)體
天津大學(xué)科學(xué)家突破人類大腦器官成功驅(qū)動機器人
新華社:突破性成果!祝賀我國科學(xué)家成功研發(fā)這一傳感器!

前OpenAI首席科學(xué)家創(chuàng)辦新的AI公司
科學(xué)家研制出一款新型柔性X射線探測器
本源量子參與的國家重點研發(fā)計劃青年科學(xué)家項目啟動會順利召開

NVIDIA首席科學(xué)家Bill Dally:深度學(xué)習(xí)硬件趨勢

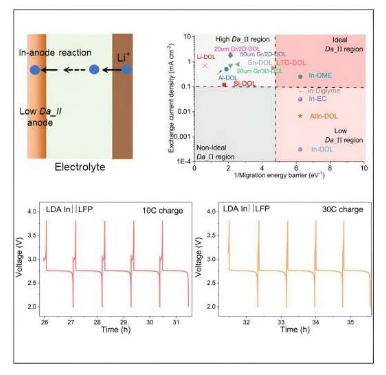
康奈爾大學(xué)科學(xué)家研制出5分鐘快速充電鋰電池





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論