") 五大激光雷達(dá)技術(shù)路線分析:齊聚美股 車載激光雷達(dá)將走向何方?
五大激光雷達(dá)技術(shù)路線分析:齊聚美股 車載激光雷達(dá)將走向何方?
2020 年對(duì)激光雷達(dá)產(chǎn)業(yè)來說,是劃時(shí)代的一年。
Velodyne(VLDR.US)、Luminar(LAZR.US) 兩家先后登陸美股,Innoviz、Aeva 和 Ouster 三家正在路上。
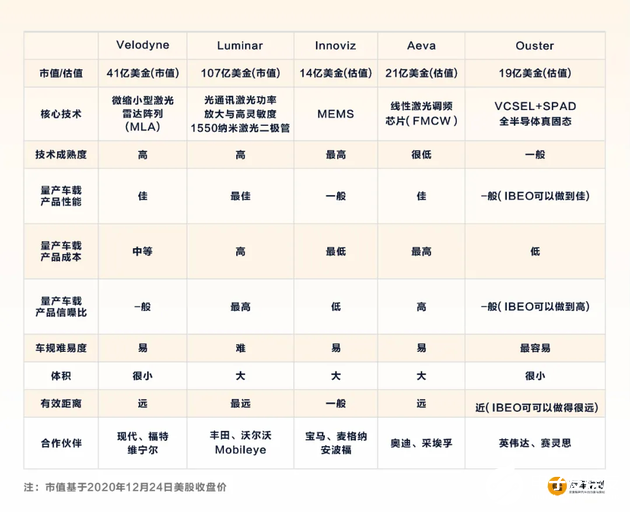
這五大激光雷達(dá)公司,目前最高的 Luminar 市值超百億美元,最低 Innoviz 估值也達(dá)到 14 億美元。
這些公司在資本市場受到熱捧背后,是各大車企紛紛選在量產(chǎn)車上搭載激光雷達(dá)。
本田(HMC.US)和豐田(TM.US)已確定在其L3級(jí)自動(dòng)駕駛車型上使用激光雷達(dá);奔馳、沃爾沃、寶馬、蔚來(45.77, -1.24, -2.64%)(NIO.US)和小鵬(XPEV.US)等廠家也準(zhǔn)備在2021年的量產(chǎn)車上選用激光雷。
可以說,激光雷達(dá)的黃金時(shí)代正在到來。
本文將對(duì)五大激光雷達(dá)的技術(shù)路線進(jìn)行分析,帶大家一起看看炙手可熱的 LiDAR 炸子雞們走向何方。
本文內(nèi)容將包括:
Velodyne 核心技術(shù)解析:MLA
Luminar:最高功率帶來最高性能
Innoviz:MEMS 帶來最低成本
Aeva:堅(jiān)持 FMCW
Ouster:近似于 Flash 的技術(shù)路線
激光雷達(dá)基本構(gòu)成
值得注意的是,Velodyne、Luminar、Innoviz、Aeva 和 Ouster ,這 5 家公司在針對(duì)前裝車載市場的主力產(chǎn)品上,都放棄了傳統(tǒng)的軸承電機(jī)機(jī)械旋轉(zhuǎn)方案。
這與國內(nèi)目前華為、速騰、禾賽、鐳神、一徑等幾家的主力產(chǎn)品有所不同。
在分析各個(gè)企業(yè)前,我們先對(duì)激光雷達(dá)性能評(píng)價(jià)的術(shù)語進(jìn)行簡單介紹。
激光雷達(dá)按照測距原理分為脈沖 ToF 型和連續(xù)波型。
我們常見的產(chǎn)品多為脈沖 ToF 型,在硬件上由四部分構(gòu)成,分別是:激光發(fā)射、掃描器、反射光接收、數(shù)據(jù)處理。
連續(xù)波型的激光雷達(dá)又分相位調(diào)變和頻率調(diào)變兩種,其中頻率調(diào)變即 FMCW 比較常見。
再具體到激光發(fā)射部分,我們通常分三大類:
EEL 型激光二極管,通常有 905 納米和 1550 納米兩種,材料則包括硅、GaAs (砷化鎵)、InP(磷化銦)三種。
VCSEL,垂直腔面發(fā)射型,通常以陣列形式出現(xiàn)。
光纖激光管。
接收部分通常分為四大類:
PIN 二極管,沒有任何增益。
APD,雪崩二極管,有一定程度增益。
SPAD,即單光子陣列,超高增益。
MPPC 或 SiPM,近似于 SPAD。
激光雷達(dá)作為一種傳感器,其最核心的指標(biāo)是信噪比。不過這也是激光雷達(dá)企業(yè)從不公開的指標(biāo)。
五大激光雷達(dá)公司技術(shù)分析
(1) Velodyne的核心技術(shù):MLA
Velodyne 是車載激光雷達(dá)領(lǐng)域的鼻祖。
Velodyne 從 2015 年開始研發(fā)固態(tài)激光雷達(dá),2017 年發(fā)布 Velarray,2020 初基本完成設(shè)計(jì)。
同年被現(xiàn)代汽車 Design-in,據(jù)說目前廣汽也在測試 Velarray。
Velodyne 在激光雷達(dá)領(lǐng)域耕耘時(shí)間最長,也累積了很多機(jī)械激光雷達(dá)的研發(fā)成果。
此前,Velodyne 稱 Velarray 上的核心技術(shù)并不是 MEMS。
在 Velarray 上,Velodyne 史昂將機(jī)械激光雷達(dá)縮微,縮微后就可以采取共振掃描的方式,仍然采用多個(gè)激光發(fā)射器,因此確實(shí)不是 MEMS。
傳統(tǒng)機(jī)械激光雷達(dá)有三種掃描方式:
第一種為棱鏡,缺點(diǎn)是會(huì)引入不必要的尺寸增加,存在軸承或襯套的磨損,隨時(shí)間推移影響壽命;優(yōu)點(diǎn)是線數(shù)可以做到很高。典型代表是華為。
第二種為旋轉(zhuǎn)鏡,缺點(diǎn)是無法充分利用時(shí)域,有一定的體積浪費(fèi),線數(shù)低,難以做到高性能;優(yōu)點(diǎn)是,壽命長,可靠度高。典型代表是法雷奧 Scala。
第三種為 MEMS 振鏡,缺點(diǎn)是 FOV 受限制、可靠度存疑、信噪比低、有效距離短。優(yōu)點(diǎn)是成本低。
Velodyne 開發(fā)了Resonant Mirror(共振鏡)技術(shù)。
這項(xiàng)技術(shù)與 MEMS 振鏡一字之差,實(shí)際差異不小。
共振掃描沒有上述三種掃瞄鏡的缺點(diǎn),但需要將激光雷達(dá)縮微,且需要配合凹面鏡成圓弧狀,再有就是成本會(huì)增加不少。
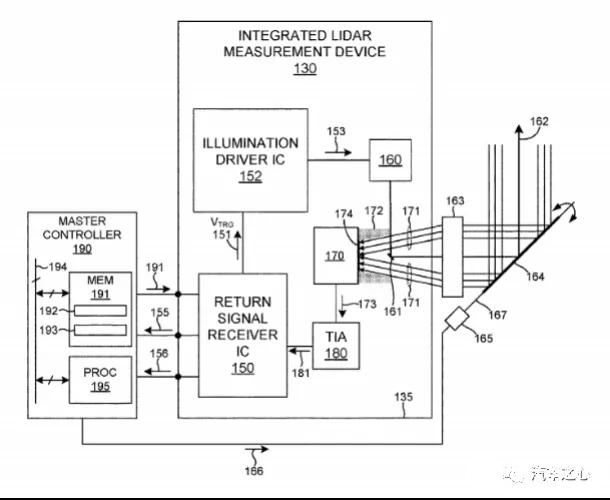
Velodyne 申請(qǐng)了 Resonant Mirror(共振鏡)的專利。專利如上圖,其中的 163 和 164 是核心。
在光通訊領(lǐng)域,光學(xué)共振是基本元素,光學(xué)共振腔是激光放大器組成的三元素之一,可以依照反射面的存在與否分為開腔與閉腔兩種。
共振腔的作用主要是用來讓增益介質(zhì)實(shí)現(xiàn)了布居數(shù)反轉(zhuǎn)后,可以做為光放大器(Gain amplifier),透過共振腔可收集放大后之訊號(hào),形成一震蕩器(oscillator)。
激光共振腔的種類主要分為三大類:
第一種為平行平面腔。
由兩個(gè)平行平面反射鏡組成,光學(xué)上稱為法布里-博羅光共振腔(Fabry–Perot resonator),簡稱為 F-P 腔,多用于固態(tài)激光系統(tǒng)。
第二種為雙凹腔。
由兩個(gè)凹面反射鏡組成,其中一種個(gè)特殊而常用的形式是共焦腔(confocal),由兩個(gè)曲率半徑相同的凹面反射鏡組成,且兩鏡間距離等于曲率半徑,兩鏡面與焦點(diǎn)重合,共焦腔衍射損耗小,調(diào)整容易。
第三種為平凹腔。
由一個(gè)平面反射鏡和一個(gè)凹面反射鏡組成,其中一種特殊而常用的形式是半共焦腔,相當(dāng)于共焦腔的一半。
從 Velodyne 的專利看,MLA 陣列有輕微的弧度,應(yīng)該是配合凹面反射鏡的。
Velodyne 新上任的 CTO Mathew Rekow 源自光通訊領(lǐng)域,對(duì)共振腔非常熟悉。
Velarray 的主要研發(fā)工作就是由 Mathew Rekow 負(fù)責(zé)。
他的一項(xiàng)工作就是將激光雷達(dá)縮微并模塊化,以此提高 Velarray 的量產(chǎn)效率,降低成本。
而這項(xiàng)工作的難點(diǎn),在于縮微模塊的同時(shí)還要保證高性能,特別是激光二極管發(fā)射需要比較大的電流,傳統(tǒng)功率器件達(dá)不到要求。
為了解決這個(gè)問題,Velodyne 在 2016 年與 EPC 公司開始合作。
EPC 擅長 GaN 功率器件技術(shù),GaN 是一種寬帶隙半導(dǎo)體材料,用這種材料制造的場效應(yīng)晶體管比傳統(tǒng)晶體管開關(guān)速度提高 10 倍以上。
Velarray 就使用了 GaN 場效應(yīng)管,也就是 Velodyne 所說的定制 ASIC。
它體積極小,僅有 2 到 4 平方毫米。在體積縮小的同時(shí),其性能也有所提升。
激光雷達(dá)里有個(gè)簡單的公式,激光雷達(dá)的 Z 軸分辨率取決于脈沖寬度。
使用了 GaN 場效應(yīng)管 ASIC 的 Velarray 脈沖寬度可達(dá) 5 納秒,這是除 SPAD 外最高的性能 ASIC 芯片。
大部分固態(tài)激光雷達(dá)一般是 50-150 納秒,SPAD 可以輕易做到1納秒甚至幾十皮秒。
目前 Velarray 主要產(chǎn)品是 8 通道模塊,高性能產(chǎn)品可以用 4 到 16 個(gè)模塊,低性能只需要 1 個(gè)模塊。
(2) Luminar:最高功率帶來最高性能
要提高激光雷達(dá)性能最簡單有效的辦法,就是提高激光發(fā)射功率。
提升功率的同時(shí),要考慮產(chǎn)品的人眼安全。提升功率的同時(shí),要考慮產(chǎn)品的人眼安全。
905 納米的硅光電探測器,1550 納米的 InGaAs 要安全 10 萬倍,可以放心地加大激光器的功率。
Luminar 就是以使用 1550 納米的 InGaAs 為特色。
其使用的激光器功率是傳統(tǒng)硅光電系統(tǒng)的 40 倍,不僅信噪比高,減小脈沖寬度至 20 納秒以下,脈沖重復(fù)頻率低于 100MHz,占空比低于 1%;同時(shí)這也提升了有效距離。
在雨雪霧天,物體的反射率會(huì)降低,這導(dǎo)致激光雷達(dá)的有效探測距離縮短,不過加大功率,就可以解決這個(gè)問題。 Luminar 就是這么做的。
Luminar 強(qiáng)調(diào):即使 10% 反射率的物體,其產(chǎn)品的有效探測距離也可以做到 200 米。
Luminar 還申請(qǐng)了關(guān)于激光功率放大的專利。
其專利是用二級(jí)大模場摻鉺光纖(EDFA)放大器將一個(gè)種子源激光調(diào)制為一個(gè)脈沖寬度至 20 納秒以下,脈沖重復(fù)頻率低于 100MHz,占空比低于 1% 的脈沖激光系統(tǒng)。
Luminar 的專利核心一個(gè)種子源激光,另一個(gè)是摻餌光纖放大器。
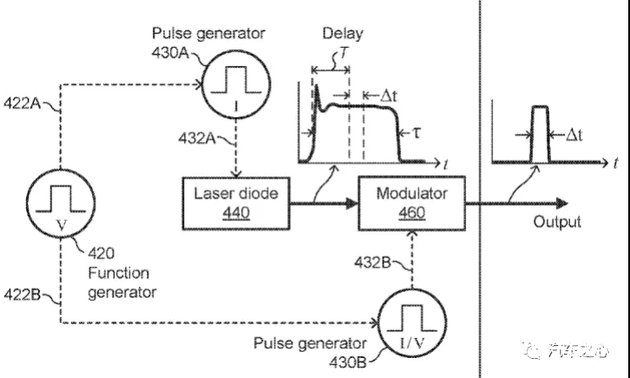
上圖為 Luminar 的種子源激光器內(nèi)部構(gòu)成
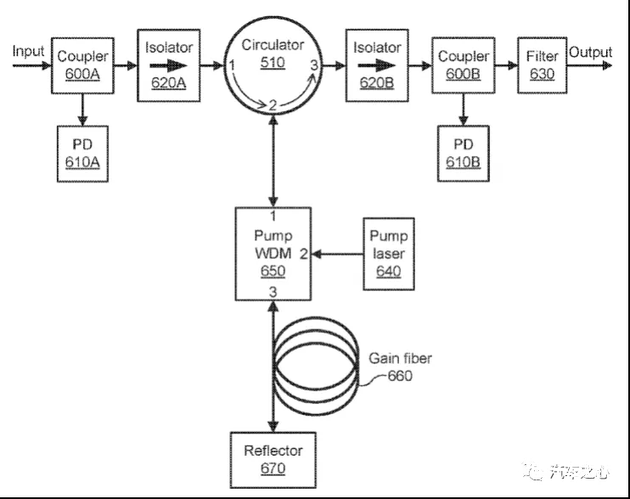
上圖為 Luminar 的放大器內(nèi)部構(gòu)成上圖為 Luminar 的放大器內(nèi)部構(gòu)成在掃描器方面,Luminar 沒有太多創(chuàng)新,還是沿用了傳統(tǒng)的 MEMS 雙軸振鏡掃描。
一般來說,傳統(tǒng) MEMS 激光雷達(dá)信噪比都低,但 Luminar 的功率密度驚人,完全消除了這個(gè)缺點(diǎn)。
由于引入了光纖激光器,Luminar 激光雷達(dá)的體積略大。
另外,1550 納米 InGaAs 激光器的使用也讓其產(chǎn)品成本居高不下。
雖然 Luminar 一再強(qiáng)調(diào)自己有能力降低成本,但光纖激光器已經(jīng)用了超過 20 年,早已沒有性能挖掘潛力了。
因而行業(yè)對(duì) Luminar 的成本控制能力,一直存疑。
(3) Innoviz:MEMS 路線帶來最低成本
MEMS 是目前最快落地的方案。
和機(jī)械激光雷達(dá)相比,其優(yōu)勢(shì)有三:
首先,MEMS 微振鏡幫助激光雷達(dá)擺脫了笨重的馬達(dá)、多棱鏡等機(jī)械運(yùn)動(dòng)裝置,毫米級(jí)尺寸的微振鏡大大減少了激光雷達(dá)的尺寸,提高了可靠性。
英飛凌收購的 Innoluce MEMS 激光雷達(dá)示意圖英飛凌收購的 Innoluce MEMS 激光雷達(dá)示意圖其次是成本,MEMS 微振鏡的引入可以減少激光器和探測器數(shù)量,極大地降低成本。
傳統(tǒng)的機(jī)械式激光雷達(dá)要實(shí)現(xiàn)多少線束,就需要對(duì)應(yīng)的發(fā)射模塊與接收模塊數(shù)量。
而采用二維 MEMS 微振鏡,僅需要一束激光光源,通過一面 MEMS 微振鏡來反射激光器的光束。
兩者采用微秒級(jí)的頻率協(xié)同工作,通過探測器接收后達(dá)到對(duì)目標(biāo)物體進(jìn)行 3D 掃描的目的。
與多組發(fā)射/接收芯片組的機(jī)械式激光雷達(dá)結(jié)構(gòu)相比,MEMS 激光雷達(dá)對(duì)激光器和探測器的數(shù)量需求明顯減少。
從成本角度分析,N 線機(jī)械式激光雷達(dá)需要 N 組 IC 芯片組:跨阻放大器(TIA)、低噪聲放大器(LNA)、比較器(Comparator)、模數(shù)轉(zhuǎn)換器(ADC)等。
如果采用進(jìn)口的激光器(典型的如 Excelitas 的 LD)和探測器(典型的如濱松的 PD),1K 數(shù)量下每線激光雷達(dá)的成本大約 200 美元,國產(chǎn)如常用的長春光機(jī)所激光器價(jià)格能低一些。
MEMS 理論上可以做到其 1/16 的成本。
最后是分辨率,MEMS 振鏡可以精確控制偏轉(zhuǎn)角度,而不像機(jī)械激光雷達(dá)那樣只能調(diào)整馬達(dá)轉(zhuǎn)速。
例如:Velarray 每秒單次回波點(diǎn)達(dá) 200 萬個(gè)。
而 Velodyne 的 128 線激光雷達(dá)也不過 240 萬個(gè),Velarray 幾乎相當(dāng)于 106 線機(jī)械激光雷達(dá)。
MEMS 的缺點(diǎn)是什么呢?
缺點(diǎn)就是信噪比低,和有效距離短,及 FOV 太窄。
因?yàn)?MEMS 只用一組發(fā)射激光和接收裝置,那么信號(hào)光功率必定遠(yuǎn)低于機(jī)械激光雷達(dá)。
同時(shí) MEMS 激光雷達(dá)接收端的收光孔徑非常小,遠(yuǎn)小于機(jī)械激光雷達(dá),而光接收峰值功率與接收器孔徑面積成正比,這導(dǎo)致功率進(jìn)一步下降。
以上意味著信噪比降低,同時(shí)有效探測距離縮短。
掃描系統(tǒng)分辨率由鏡面尺寸與最大偏轉(zhuǎn)角度的乘積共同決定。
鏡面尺寸越大,偏轉(zhuǎn)角度就越小。
而鏡面尺寸越大,分辨率就越高。
最后MEMS振鏡的成本和尺寸也成正比。
目前MEMS振鏡最大尺寸是 Mirrorcle,可達(dá) 7.5mm,售價(jià)高達(dá) 1199 美元。
速騰投資希景科技開發(fā)的 MEMS 微振鏡鏡面直徑為 5mm,已經(jīng)進(jìn)入量產(chǎn)階段。
禾賽科技 PandarGT 3.0 中用到的 MEMS 微振鏡,則是由團(tuán)隊(duì)自研。
關(guān)于 MEMS 缺點(diǎn)的解決辦法,主要有兩種:
一是使用 1550 納米發(fā)射波長的激光器,用光纖領(lǐng)域的摻鉺放大器進(jìn)一步提升功率。
1550 納米波段的激光,其人眼安全閾值遠(yuǎn)高于 905 納米激光。因此在安全范圍內(nèi)可以大幅度提高 1550 納米光纖激光器的功率。典型例子就是 Luminar。
缺點(diǎn)是 1550 納米激光器價(jià)格極其昂貴。
且這是激光器產(chǎn)業(yè)的范疇,激光雷達(dá)廠家在這方面技術(shù)積累遠(yuǎn)不及激光器產(chǎn)業(yè)廠家,想壓低成本幾乎不可能。
二 是使用 SPAD 或 SiPM 接收陣列,而不是傳統(tǒng) APD 陣列,SPAD 陣列效率比 APD 高大約 10 萬倍。
但 SPAD 陣列目前還不算特別成熟,價(jià)格也略高。
(4)Aeva:堅(jiān)持 FMCW
激光雷達(dá)、傳統(tǒng)攝像頭和毫米波雷達(dá)有共通之處,傳統(tǒng) ToF 激光雷達(dá)可以看作一種 3D 攝像頭,只不過分辨率一般很低。
傳統(tǒng)攝像頭是 2D 成像,激光雷達(dá)是 3D。
激光也可以看做一種電磁波,與毫米波雷達(dá)也非常接近。
FMCW激光雷達(dá)原理圖FMCW激光雷達(dá)原理圖早期汽車上也是采用電磁波直接發(fā)射反射的方式來測定距離,后來發(fā)現(xiàn)這種方式信噪比低,消耗功率高,如同現(xiàn)在的 ToF 激光雷達(dá)。
后來發(fā)現(xiàn)連續(xù)波頻率調(diào)制相干檢測(FMCW),信噪比高且消耗功率低,但信號(hào)處理運(yùn)算量大。
隨著當(dāng)下芯片算力的提高,這個(gè)困難慢慢被克服,今天電磁波雷達(dá)都是FMCW型的。
此外,早期的電磁波雷達(dá)也是電機(jī)帶動(dòng)掃描的,后來才轉(zhuǎn)換為印刷平面天線陣列代替機(jī)械掃描。
人們從車載雷達(dá)的發(fā)展歷程中似乎可以得出結(jié)論,激光雷達(dá)最終也會(huì)是 FMCW 的,也是用陣列代替掃描器的。
ToF 激光雷達(dá)的干擾因素或者說噪音比較多。
一是太陽光線的影響,這個(gè)對(duì) 1550 納米激光比較敏感,905 納米就好得多。
二是物體的表面材料與顏色也會(huì)影響,不同顏色不同材料對(duì)激光的吸收率是不同的,比如白色和黑色反射率差異巨大,反射率與有效距離關(guān)系密切。反射率越低,有效距離越短。
一般測量激光雷達(dá)有效距離都需要加上反射率 90% 這個(gè)測試條件;如果反射率 10%,極端情況下,有效距離可能縮短 50%。
黑色物體反射點(diǎn)云數(shù)量低,遠(yuǎn)距離時(shí)可能無法感測到。
FMCW 激光雷達(dá)采用相位干涉拍頻法測量,這些噪音都不存在了。
對(duì)于 FMCW 激光雷達(dá),信噪比與發(fā)射光子總數(shù)成比例,而非峰值激光功率。
由于 FMCW 激光雷達(dá)具有高出 10 倍以上的靈敏度,因此其發(fā)射平均功率可以比脈沖 ToF 激光雷達(dá)低 100 倍,這意味著低功耗和更高的人眼安全水平。
FMCW 激光雷達(dá)的光子電路將一部分出射相干激光與接收光混合。
這提供了一種獨(dú)特的‘解鎖鑰匙’,可以有效阻止任何環(huán)境輻射或其它激光雷達(dá)的干擾。
FMCW 激光雷達(dá)的光源需要根據(jù)測量目的對(duì)光載波的頻率進(jìn)行不同形式的調(diào)制,目前常用的包括三角波形式、鋸齒波形式和正弦形式。
發(fā)射信號(hào)的頻率圍繞著光載波頻率 fc隨時(shí)間 t 周期性變化,每一周期 T 稱為信號(hào)重復(fù)時(shí)間,頻率的變化范圍(f1-f2)稱為調(diào)制帶寬 B。
使用三角波形狀的調(diào)頻形式可以較為容易地解調(diào)出目標(biāo)反射信號(hào)的多普勒頻率,從而可實(shí)現(xiàn)同時(shí)測距與測速。
鋸齒波形狀的調(diào)頻形式常用于與探測目標(biāo)的相對(duì)速度引入的多普勒頻移量可以忽略的時(shí)候,可以達(dá)到相對(duì)最大的探測距離。
正弦形狀調(diào)頻信號(hào)的產(chǎn)生較為方便,但是解調(diào)方式復(fù)雜,且其精度相對(duì)于高調(diào)頻線性度的調(diào)制形式略差。
一般使用三角波,能夠像 FMCW 毫米波雷達(dá)一樣測得目標(biāo)的速度。
今天的 FMCW 毫米波雷達(dá)非常簡單,主要芯片就是收發(fā)器和處理器,其帶來的好處是易于集成芯片化。這同時(shí)意味著小體積和成本低。
然而 FMCW 毫米波雷達(dá)的成熟歷經(jīng)了近 10 年的時(shí)間。
今天的 FMCW 激光雷達(dá)技術(shù)可以說成熟度很低,無論是激光調(diào)制、接收和數(shù)據(jù)處理都處于萌芽階段,遠(yuǎn)不能和ToF激光雷達(dá)比。
特別是激光調(diào)制,難度極高,從事相關(guān)研究的企業(yè)屈指可數(shù)。
根據(jù)調(diào)諧器件與激光器的關(guān)系,目前實(shí)現(xiàn)激光光載波頻率調(diào)制的方法可以分為內(nèi)調(diào)制技術(shù)和外調(diào)制技術(shù)兩種。
內(nèi)調(diào)制技術(shù)是指調(diào)制過程與激光振蕩建立同時(shí)進(jìn)行的調(diào)制技術(shù),通過調(diào)制改變激光腔的諧振參數(shù),從而實(shí)現(xiàn)激光器輸出頻率的變化,主要包括調(diào)制諧振腔的光學(xué)長度或改變腔內(nèi)的增益損耗譜位置等方式;
外調(diào)制技術(shù)是指在激光振蕩建立之后,在激光出射的光路上使用調(diào)制器對(duì)光場參數(shù)進(jìn)行調(diào)制的技術(shù)。
無論哪一種,都尚處在摸索階段。
調(diào)諧性好的光源大多不夠穩(wěn)定,穩(wěn)定的光源大多不能寬可調(diào)諧。
從調(diào)制方式的角度而言,內(nèi)調(diào)制方式由于直接改變諧振腔參數(shù),獲得大調(diào)諧范圍相對(duì)容易,但是由于激光建立時(shí)間的存在會(huì)造成輸出調(diào)頻光的瞬時(shí)線寬比較寬,導(dǎo)致光源相干長度的減少。或者為了建立起穩(wěn)定光場就必須限制調(diào)諧速率。
外調(diào)制方式通過電光效應(yīng)等調(diào)諧機(jī)制能夠在保持種子光的優(yōu)異特性的同時(shí)快速改變光場的瞬時(shí)頻率,但是由于電光效應(yīng)本身的工作帶寬有限,限制了光源調(diào)諧范圍的增加,即限制了該系統(tǒng)可實(shí)現(xiàn)的最高分辨力。
目前業(yè)內(nèi)傾向于外調(diào)制方式,這種方式缺點(diǎn)是成本高、體積大。
FMCW 的缺點(diǎn)是成本高,其所有元件都需要具備超高精度,因?yàn)檎{(diào)諧頻率是 THz 級(jí)別的,這需要測量儀器級(jí)的元件。
這種元件供應(yīng)商極少,每個(gè)元件都需要高精度檢測,良率低。
即使將來量產(chǎn),成本也居高不下。所有光學(xué)表面都必須在更嚴(yán)格的公差范圍內(nèi),例如λ(波長)/20。
FMCW 對(duì) ADC 轉(zhuǎn)換速率的要求是 ToF 系統(tǒng)的 2 到 4 倍,精度要求更高。
對(duì) FPGA 的要求是能夠接收數(shù)據(jù)并進(jìn)行超高速FFT轉(zhuǎn)換。
即使使用 ASIC,F(xiàn)MCW 系統(tǒng)所需的處理系統(tǒng)復(fù)雜度(和成本)也是 ToF 系統(tǒng)的十倍。
除了成本,F(xiàn)MCW 雖然沒有了外界因素的干擾,但自身會(huì)帶來新的干擾。
和毫米波雷達(dá)一樣,F(xiàn)MCW 激光雷達(dá)需要考慮旁瓣的干擾,F(xiàn)MCW 系統(tǒng)依靠基于窗函數(shù)的旁瓣抑制來解決自干擾(雜波),該干擾遠(yuǎn)不如沒有旁瓣的 ToF 系統(tǒng)健壯。
為了提供背景信息,一束 10 微秒的 FMCW 脈沖可以在 1.5 公里范圍內(nèi)徑向傳播。
在此范圍內(nèi),任何對(duì)象都將陷入快速傅里葉變換(時(shí)間)旁瓣。即使是更短的 1 微秒 FMCW 脈沖也可能會(huì)被 150 米外的高強(qiáng)度雜波破壞。
第一個(gè)矩形窗口快速傅里葉變換(FFT)的旁瓣是大家所知的 -13dB,遠(yuǎn)高于獲得優(yōu)質(zhì)點(diǎn)云所需要的水平。
此外,F(xiàn)MCW 激光雷達(dá)有輕微延遲的問題,這是相干檢測天生的缺陷,無法改變。
Aeva 的主要合作伙伴是奧迪和 ZF。
采用 FMCW 激光雷達(dá)其他公司還有,通用 2017 年收購的 Strobe,這家公司自被收購后一直沒有任何動(dòng)作。
再有就是 BMW i Venture 投資的 Blackmore,2019 年被 Aurora 收購。
(5)近似于 Flash 的 Ouster
嚴(yán)格意義上的 Flash 激光雷達(dá)指一次閃光(激光脈沖)成像的激光雷達(dá)。
借用相機(jī)行業(yè)的用語,也叫全局快門激光雷達(dá)。
廣義的 Flash 激光雷達(dá)指焦平面陣列成像激光雷達(dá),不一定非要全局快門,也可以局部快門。
全局快門型激光雷達(dá)產(chǎn)品的典型代表是德國大陸汽車 2016 年收購的 ASC 公司。
與掃描成像激光雷達(dá)比,F(xiàn)lash 激光雷達(dá)沒有任何運(yùn)動(dòng)部件,是絕對(duì)的固態(tài)激光雷達(dá),能夠達(dá)到最高等級(jí)的車規(guī)要求。
掃描成像要掃描整個(gè)工作場才能提供圖像(點(diǎn)云),通常幀率是 5-10Hz。
這就意味著有至少 100 毫秒的延遲,在高速場景下,這個(gè)延遲是難以接受的。
如果掃描型激光雷達(dá)要提高幀率,那么就必須降低水平角分辨率,這兩者是相悖的。
道理很簡單,掃描越快,分辨率當(dāng)然會(huì)降低。
但 Flash 不會(huì),理論上它的脈沖只有幾十納秒到1納秒,也就是說幀率可以做到幾十 KHz,甚至 1MHz。
當(dāng)然,考慮數(shù)據(jù)處理能力,現(xiàn)在的 Flash 激光雷達(dá)還是3 0Hz,但它可以說是無延遲的。
德國大陸汽車的 HFL110 Flash 激光雷達(dá),已經(jīng)被豐田 L3 級(jí)無人駕駛量產(chǎn)車確定使用
雖然豐田投資了 Luminar,但依然使用了德國大陸汽車的激光雷達(dá)。
Flash 激光雷達(dá)的缺點(diǎn)很明顯:
功率密度太低,導(dǎo)致其有效距離一般難以超過 50 米,分辨率也比較低,用大功率 VCSEL 和 SPAD 能夠解決部分問題,但成本也迅速增加。
德國大陸汽車在性能和成本間平衡,其成本估計(jì)應(yīng)該不超過 300 美元,量產(chǎn)后還可以再降大約 100 美元。
為了解決信噪比,有效距離近的缺點(diǎn),有公司對(duì) Flash 激光雷達(dá)做了改進(jìn)。
改進(jìn)型的設(shè)計(jì)采用 VCSEL 激光發(fā)射陣列,VCSEL 激光發(fā)射陣列采用半導(dǎo)體工藝芯片工藝制造,每一個(gè)小單元的電流導(dǎo)通都可以控制,讓發(fā)光單元按一定模式導(dǎo)通點(diǎn)亮,可以取得掃描器的效果,還可以精確控制掃描形狀。
比如車速高了,就縮小FOV,提高掃描精度。
車速低了,就增加 FOV,檢測范圍加大。
Ibeo 和 Ouster 都是這種設(shè)計(jì)。
Ibeo 認(rèn)為這是掃描型激光雷達(dá)。
而Ouster 認(rèn)為是 Flash 激光雷達(dá),只不過前面加了個(gè) Multi-Segment。
實(shí)際兩者是同一種激光雷達(dá)。
Ibeo 在激光雷達(dá)領(lǐng)域耕耘超過 20 年,其 Flash 激光雷達(dá)性能非常優(yōu)秀。除了像素?cái)?shù)略低于 Lumianr,其余大部分指標(biāo)都與之相當(dāng)。
但可靠性遠(yuǎn)在 Luminar 之上,車規(guī)也更容易通過。
為什么這些超級(jí)巨頭看好 Flash 路線?
我認(rèn)為,激光雷達(dá)的發(fā)展方向是 Flash,也可以叫深度相機(jī)。
之所以這樣說,是因?yàn)?Flash 激光雷達(dá):1)最容易通過嚴(yán)格車規(guī);2)體積最小;3)安裝位置最靈活;4)全芯片化;5)成本最低(單價(jià)可輕松做到100美元以下);6)性能挖掘潛力最大(深度相機(jī)近似于當(dāng)年剛剛萌芽的CMOS圖像傳感器,最終取代了CCD)。
全球科技界在全局 Flash 領(lǐng)域的研發(fā)投入遠(yuǎn)遠(yuǎn)高于其他類型的激光雷達(dá),全部都是超級(jí)巨頭:
博通(特斯拉(661.77, 15.79, 2.44%)的合作伙伴, AVGO.US)、索尼(96.84, -0.62, -0.64%)、三星、蘋果(131.97, 1.01, 0.77%)(AAPL.US)、意法半導(dǎo)體(STM.US)、英飛凌、AMS、Lumentum、東芝、松下(11.386, -0.00, -0.04%)、佳能(19.59, 0.03, 0.15%)、濱松、安森美(ON.US)、電裝以及豐田都在開發(fā) Flash 車載激光雷達(dá)。
在光電領(lǐng)域:
無論是 SPIE 國際光電工程學(xué)會(huì),OSA 美國光學(xué)學(xué)會(huì),ISSCC 國際固態(tài)電路協(xié)會(huì),歐洲光電子行業(yè)協(xié)會(huì) EPIC 會(huì)議里,幾乎所有的論文都是有關(guān) Flash 激光雷達(dá)關(guān)鍵部件 SPAD 或 VCSEL 的,傳統(tǒng)的激光雷達(dá)論文完全沒有。
深度相機(jī)不僅可以用于車載領(lǐng)域,也可以用于其他固態(tài) 3D 感測領(lǐng)域,還有 AR/VR。
與特斯拉(TSLA.US)合作開發(fā)下一代芯片的全球第二大 IC 設(shè)計(jì)公司博通,在 2020 年 11 月 EPIC 在線會(huì)議上推出車載 Flash 激光雷達(dá)用 SPAD 或 SiPM 陣列芯片。
蘋果 iPhone12 Pro 的超廣角鏡頭的上下兩部分構(gòu)成了激光雷達(dá)。
這與。車用的 Flash 激光雷達(dá)沒有區(qū)別,也是 VCSEL+SPAD 的設(shè)計(jì),只是功率小一點(diǎn),體積小一點(diǎn)。
手機(jī)界實(shí)際早已廣泛采用激光雷達(dá),只不過叫 ToF 相機(jī)。
蘋果回歸了它的真名。
蘋果已經(jīng)確定造車,自然也要利用其在激光雷達(dá)領(lǐng)域的研發(fā)成果,這些研發(fā)成果完全可以用在汽車領(lǐng)域。
蘋果iPad 激光雷達(dá)拆解,傳感器也就是 SPAD 由索尼提供。蘋果iPad 激光雷達(dá)拆解,傳感器也就是 SPAD 由索尼提供。
索尼在 2020 年 12 月 ISSCC上 發(fā)表了題為:A 189×600 Back-Illuminated Stacked SPAD Direct Time-of-Flight Depth Sensor for Automotive LiDAR Systems 的論文,也是直指汽車 Flash 激光雷達(dá)。
一般而言,制約 Flash 激光雷達(dá)性能的兩個(gè)元素:一是激光發(fā)射的 VCSEL;二是接收的 SPAD。
VCSEL 體積小,成本低,易控制,但功率比較低。
幾家 VCSEL 大廠都在努力開發(fā)高功率 VCSEL 陣列,進(jìn)展最快的是蘋果主供應(yīng)商 Lumentum,也是全球第一大 VCSEL 廠家,市場占有率大約 45%。
目前試驗(yàn)產(chǎn)品最高可以做到 10 瓦功率,30 到 50 瓦功率就可以與非 Flash 激光雷達(dá)平起平坐了。
車載激光雷達(dá) SPAD 方面,目前差不多只有 1 萬像素,手機(jī)領(lǐng)域 30 萬像素已經(jīng)是主流。
日本在 CCD 領(lǐng)域累積了豐富的經(jīng)驗(yàn),在 SPAD 領(lǐng)域擁有壓倒性優(yōu)勢(shì)。
佳能已經(jīng)開發(fā)出 100 萬像素的 SPAD,可以輕松碾壓目前性能最高的 128 線激光雷達(dá),更不要說 Luminar 的 MEMS 激光雷達(dá)了。
三星在 2020 年底的國際固態(tài)電路研討會(huì)上發(fā)表了題為:
A 4-tap 3.5μm 1.2Mpixel Indirect Time-of-Flight CMOS Image Sensor with Peak Current Mitigation and Multi-User Interference Cancellation 的論文,提出了 120 萬像素的 ToF 傳感器(即SPAD)。
松下則開發(fā)了堆疊型 SPAD。這種 SPAD 可以做到 100 米的有效距離。
東芝也在開發(fā)芯片型SPAD。東芝也在開發(fā)芯片型SPAD。
東芝 2018 年 3 月試做的 SPAD 芯片,分辨率 240x96。
MEMS 激光雷達(dá)只是過渡產(chǎn)品,只是這個(gè)過渡期有多長很難判斷。
我認(rèn)為,快的話可能 3 年,慢的話可能 6 年。屆時(shí),激光雷達(dá)會(huì)和今天傳統(tǒng)的攝像頭一樣,安裝在后視鏡的位置。
責(zé)任編輯:PSY
-
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
3969瀏覽量
189830 -
車載激光雷達(dá)
+關(guān)注
關(guān)注
1文章
32瀏覽量
6328
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
激光雷達(dá)會(huì)傷害眼睛嗎?

激光雷達(dá)的維護(hù)與故障排查技巧
激光雷達(dá)技術(shù)的基于深度學(xué)習(xí)的進(jìn)步
激光雷達(dá)技術(shù)的發(fā)展趨勢(shì)
光學(xué)雷達(dá)和激光雷達(dá)的區(qū)別是什么
又一廠商展出FMCW激光雷達(dá),從PPT走向樣品
一文看懂激光雷達(dá)

硅基片上激光雷達(dá)技術(shù)綜述

硅基片上激光雷達(dá)的測距原理

激光雷達(dá)的探測技術(shù)介紹 機(jī)載激光雷達(dá)發(fā)展歷程

激光雷達(dá)安全嗎?技術(shù)原理解讀激光雷達(dá)安全性
汽車激光雷達(dá):競爭格局和技術(shù)演進(jìn)

512線激光雷達(dá)還不是盡頭,1024線激光雷達(dá)早在兩年前已經(jīng)推出?

華為激光雷達(dá)參數(shù)怎么設(shè)置
激光雷達(dá)上下游廠商梳理分析






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論