 自動駕駛熱度越來高,其背后的核心技術也是大家關注的焦點之一
自動駕駛熱度越來高,其背后的核心技術也是大家關注的焦點之一
近日,Waymo終于實現了將真正的自動駕駛汽車帶到城市街道上的承諾;今年10月,百度也曾宣布將在北京全面開放自動駕駛出租車服務。
(來源于網絡)
自動駕駛熱度越來高,大家的關注程度也不斷升高,其背后的核心技術也是大家關注的焦點之一。
(來源于網絡) 精準定位技術是移動機器人、自動駕駛等領域的核心技術。多傳感融合是一項綜合性的前沿技術,已成為自動駕駛及機器人的主流定位方案。將多個傳感器信息進行融合的技術,能夠彌補單個傳感器的局限,使得定位使得定位更加精準,具備更好的魯棒性。
目前從事移動機器人、自動駕駛相關的伙伴,在項目中經常會用到多個傳感器融合的方案,但是實踐項目落地中,如何優化融合方案?有新的傳感器融合時,又該如何優化框架并落地實現呢? 多傳感器是一個比較龐大的系統,涉及的內容廣泛而繁雜,自學難度大,很多大佬在知乎分享干貨內容,但大家很難通過零散的知識點達到系統學習的效果,更難了解到落地經驗的精髓。那么,怎樣高效學習多傳感器融合的主要內容,先要從零開始,親手搭建前端-回環檢測-基于濾波-基于圖優化的融合定位解決方案,又應該怎么做呢?
責任編輯:xj
原文標題:激光雷達+GPS+IMU+輪速計的傳感器融合的定位系統
文章出處:【微信公眾號:傳感器技術】歡迎添加關注!文章轉載請注明出處。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
gps
+關注
關注
22文章
2894瀏覽量
166184 -
定位系統
+關注
關注
10文章
583瀏覽量
36471 -
激光雷達
+關注
關注
968文章
3967瀏覽量
189829 -
IMU
+關注
關注
6文章
306瀏覽量
45728
原文標題:激光雷達+GPS+IMU+輪速計的傳感器融合的定位系統
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
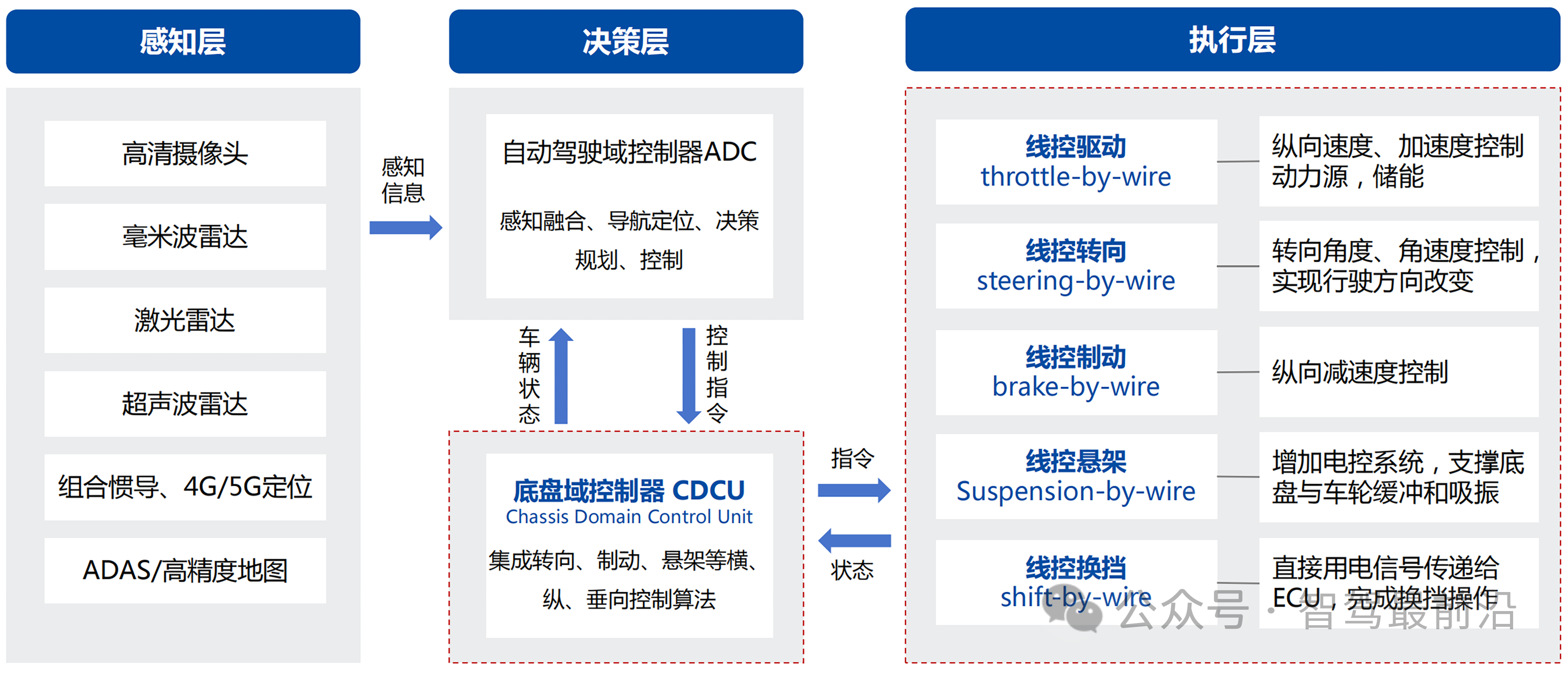
線控底盤如何讓自動駕駛加速奔跑?
線控底盤技術是智能駕駛系統的核心技術之一,通過電子信號取代傳統的機械傳動,實現車輛動力、轉向、制動、懸架及換擋等功能的精準控制。它不僅是實現L3及以上
一文聊聊自動駕駛測試技術的挑戰與創新
隨著自動駕駛技術的飛速發展,自動駕駛測試的重要性也日益凸顯。自動駕駛測試不僅需要驗證車輛的感知、決策、控制模塊的獨立性能,還需確保系統在復雜場景中運行的整體可靠性。然而,

重塑線控底盤技術:自動駕駛的未來支柱
線控底盤(X-by-wire)技術,作為自動駕駛技術的核心支撐,正悄然改變著汽車工業的技術架構與市場生態。本文深入剖析了線控底盤的定義、在
人工智能的應用領域有自動駕駛嗎
的核心技術 自動駕駛汽車的核心依賴于人工智能,尤其是機器學習和深度學習技術。這些技術使得汽車能夠通過傳感器收集大量數據,并實時進行分析。以下
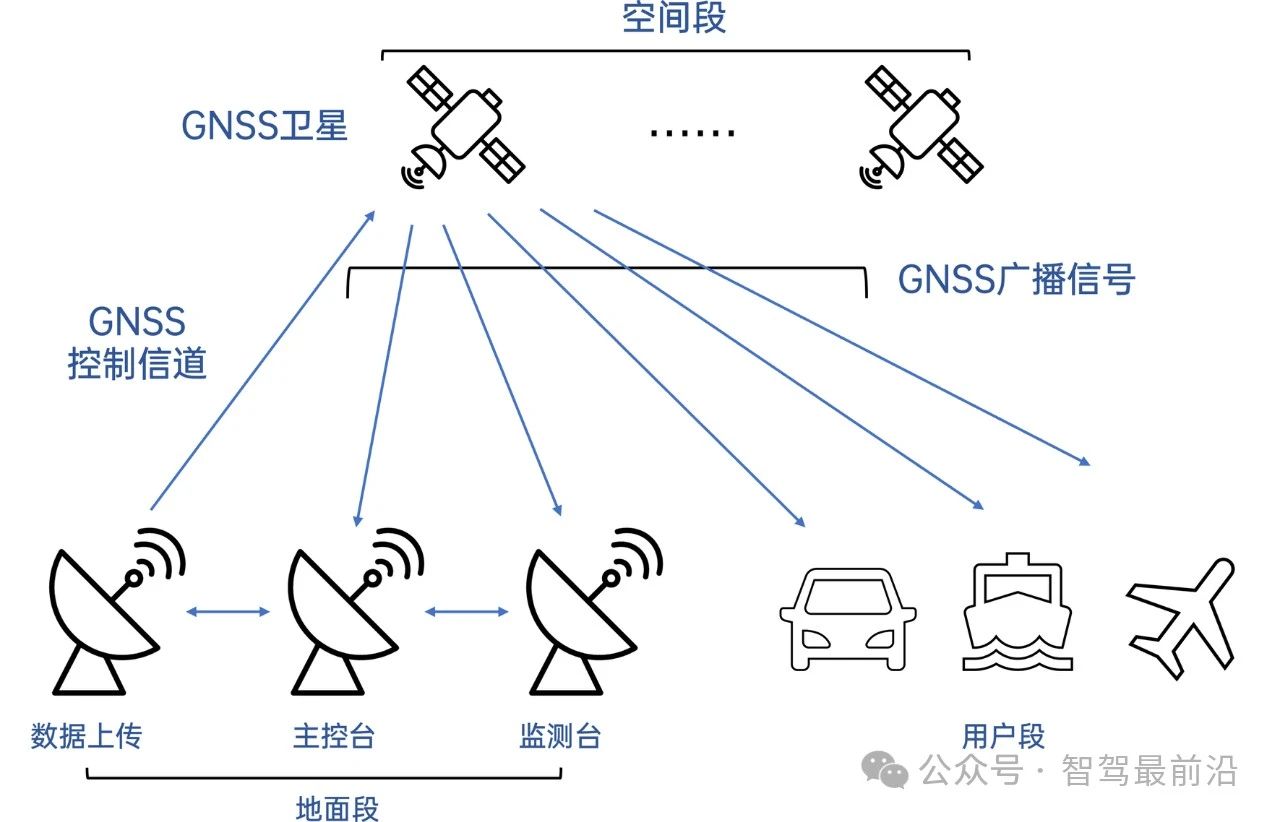
為什么自動駕駛中全球導航衛星系統如此重要?
全球導航衛星系統(GNSS,Global Navigation Satellite System)作為實現高精度定位的核心技術之一,已經成為自動駕駛技術發展的重要支撐。隨著高級輔助
FPGA在自動駕駛領域有哪些優勢?
FPGA(Field-Programmable Gate Array,現場可編程門陣列)在自動駕駛領域具有顯著的優勢,這些優勢使得FPGA成為自動駕駛技術中不可或缺的一部分。以下是FP
發表于 07-29 17:11
FPGA在自動駕駛領域有哪些應用?
和深入。
綜上所述,FPGA在自動駕駛領域具有廣泛的應用前景和重要的應用價值。其高性能、可配置性、低功耗和低延遲等特點為自動駕駛的實現提供了強有力的支持,并將推動自動駕駛
發表于 07-29 17:09
自動駕駛仿真測試實踐:高精地圖仿真
引言隨著自動駕駛技術的快速發展,基于高精地圖的自動駕駛功能已初步落地應用,并持續迭代升級。在研發測試階段,多方面因素導致測試人員可能無法拿到控制器內部

特斯拉自動駕駛風波再起:加州監管機構指控引關注
特斯拉自動駕駛虛假營銷風波再起:加州監管機構指控引關注
近日,特斯拉再次成為公眾關注的焦點,不過這次并非因為其在電動汽車
未來已來,多傳感器融合感知是自動駕駛破局的關鍵
/L4級自動駕駛賽跑的元年。
馬斯克評論FSD 12.3版本的左轉彎操作就像人類司機一樣。如果FSD 12.3版本成功,將基本顛覆目前市場上的智能駕駛技術路線。基于“數據/算法/算力”
發表于 04-11 10:26
自動駕駛發展問題及解決方案淺析
汽車的發展提供有益的參考。 ? 自動駕駛汽車發展的現狀與挑戰 (一)技術難題 自動駕駛汽車的核心在于通過先進的傳感器、算法和控制系統實現車輛
華為自動駕駛技術怎么樣?
? ? ? 自動駕駛技術是當今世界汽車產業的重要發展方向。作為全球領先的科技企業,華為在自動駕駛技術方面也進行了深入的研發和創新。 一、華為





 工商網監
工商網監
評論