 從零造單片機所需的知識及步驟
從零造單片機所需的知識及步驟
來來來,讓我們一起,左手右手一個慢動作。每一個方向都值得一個人用一生去鉆研,每一個步驟都有其自身的魅力。
第一步,做出實體芯片。
單片機一般理解為MCU(Microcontroller Unit,微控制單元),包含定時器、ALU(Arithmetic Logic Unit,算術邏輯單元)、內存、寄存器、總線等部分。而普通的意義的單片機還包含GPIO、串口(UART)、DMA、協處理器、ADDA等等。
看懂如下圖前置:計算機組成原理,微機原理。
流水線
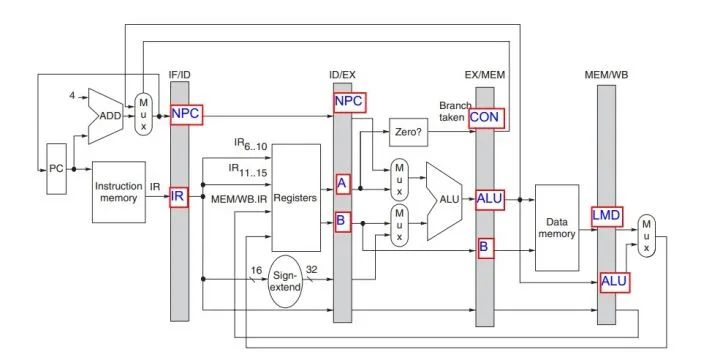
前置:數字邏輯電路,集成電路設計及其EDA技術,verilog
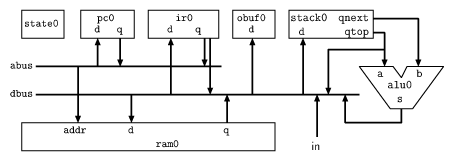
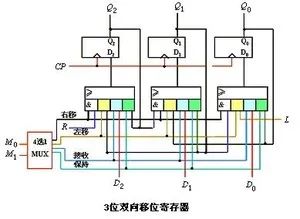
把各個模塊細分為寄存器級,比如移位運算器、節拍器、譯碼器、存儲器等
module minicpu(clk, reset, run, in, cs, pcout, irout, qtop, abus, dbus, out);input clk,reset,run;input [15:0] in;output [1:0] cs;output [15:0] irout, qtop, dbus, out;output [11:0] pcout, abus;wire [15:0] qnext, ramout, aluout;reg [11:0] abus;reg halt, jump, pcinc, push, pop, thru, qthru, dbus2qtop, dbus2ram, dbus2obuf, ir2dbus, qtop2dbus, alu2dbus, ram2dbus, in2dbus;reg pop2, ir2abus, qtop2abus, qnext2abus;reg [11:0] pcout, pcnext;reg [15:0] out;statef statef0(.clk(clk),.reset(reset),.run(run),.halt(halt),.cs(cs));stackm stackm0(.clk(clk),.reset(reset),.load(dbus2qtop),.push(push),.pop(pop),.pop2(pop2),.thru(qthru),.d(dbus),.dthru(ramout),.qtop(qtop),.qnext(qnext));alu alu0(.a(qtop),.b(qnext),.f(irout[4:0]),.s(aluout));dpram #(16,10,1024) dpram0(.clk(clk),.load1(dbus2ram),.addr1(abus),.addr2(pcnext),.d1(dbus),.q1(ramout),.q2(irout));
物理上是這樣的
然后會調試BUG,看時序。 前置:時序用MODELSIM,綜合用QUARTUS II 等等
然后此時才剛剛開始。 繼續生成電路網表,時序收斂,如果不對繼續返回上述流程繼續調試。 前置:Synopsys回顧一下
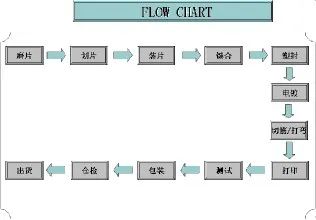
根據得到的圖表設計版圖和工藝流程,大概是這樣 前置:集成電路制造
然后進行電氣測試,電磁測試,最后封裝。 前置:集成電路封裝技術
最后不能忘記出片的時候 焚香沐浴更衣,朝南拜三拜,祈禱不會有大問題。
匯編器(把匯編語言變成機器碼) 前置:perl
前置:匯編語言
前置:ucos(嵌入式操作系統)
系統宏定義,系統功能配置,系統頭文件,初始化文件,調度文件,任務管理文件
系統時間管理文件,信號量文件,郵箱文件,消息隊列文件,內存管理文件,系統服務文件,MAIN文件。 寫操作系統中的任務
前置:C語言,數據結構,算法導論。
前置:PCB設計和制造,電焊等技藝,模電、高頻電子線路,信號與系統
#!/usr/bin/perl -W//*****************//print "*** LABEL LIST *** ";foreach $l (sort(keys(%label))){printf "%-8s%03X ",$l,$label{$l};}$addr=0;print " *** MACHINE PROGRAM *** ";foreach (@source){$line = $_;s/w+://;if(/PUSHIs+(-?d+)/){printf "%03X:%04X $line",$addr++,$MCODE{PUSHI}+($1&0xfff);} elsif(/(PUSH|POP|JMP|JZ|JNZ)s+(w+)/){printf "%03X:%04X $line",$addr++,$MCODE{$1}+$label{$2};}elsif(/(-?d+)/){printf "%03X:%04X $line",$addr++,$1&0xffff;} elsif(/([A-Z]+)/){printf "%03X:%04X $line",$addr++,$MCODE{$1};} else {print " $line";}}
編譯器 BISON和FLEX(把高級語言轉換成匯編語言) 前置:編譯原理
終于可以固化進ROM可以跑程序了,你還需要一段小型的開啟代碼(bootloader)%{%}%union {char *s; int n;}%tokenNAME NUMBER%destructor { free($$); } NAME NUMBER%tokenIF WHILE DO %typeif0 %token GOTO ELSE INT IN OUT HALT......%%int yyerror(char *s){ printf("%s ",s); }int main(){ yyparse(); }%{int n=0;%}......while {yylval.n=++n;return(WHILE);}[0-9]+ {yylval.s=strdup(yytext);return(NUMBER);}[a-zA-Z][a-zA-Z0-9]* {yylval.s=strdup(yytext);return(NAME);}. {return(yytext[0]);}%%int yywrap(){ return(1);}
前置:匯編語言
然后開始寫操作系統start: JK startnopsdal 32sdah 0datploop: tinginltinginhjend cxcutenopjmp loopincexcute: call 32nopjmp startnop
前置:ucos(嵌入式操作系統)
系統宏定義,系統功能配置,系統頭文件,初始化文件,調度文件,任務管理文件
系統時間管理文件,信號量文件,郵箱文件,消息隊列文件,內存管理文件,系統服務文件,MAIN文件。 寫操作系統中的任務
前置:C語言,數據結構,算法導論。
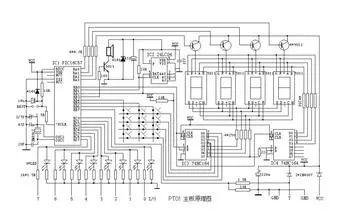
拿著含辛茹苦的板子還需要配置最小系統以及外圍器件double KalmanFilter(const double ResrcData,double ProcessNiose_Q,double MeasureNoise_R,double InitialPrediction){double R = MeasureNoise_R;double Q = ProcessNiose_Q;static double x_last;double x_mid = x_last;double x_now;static double p_last;double p_mid ;double p_now;double kg;x_mid=x_last; //x_last=x(k-1|k-1),x_mid=x(k|k-1)p_mid=p_last+Q; //p_mid=p(k|k-1),p_last=p(k-1|k-1),Q=噪聲kg=p_mid/(p_mid+R); //kg為kalman filter,R為噪聲x_now=x_mid+kg*(ResrcData-x_mid);//估計出的最優值p_now=(1-kg)*p_mid;//最優值對應的covariancep_last = p_now; //更新covariance值x_last = x_now; //更新系統狀態值return x_now;}
前置:PCB設計和制造,電焊等技藝,模電、高頻電子線路,信號與系統
如果有信號傳輸
通訊協議
前置:SPI,I2C,CAN,TCP/IP、wifi等等
RF天線uint SPI_RW(uint uchar){uint bit_ctr;for(bit_ctr=0;bit_ctr<8;bit_ctr++) // output 8-bit{MOSI = (uchar & 0x80); // output 'uchar', MSB to MOSIuchar = (uchar << 1); // shift next bit into MSB..SCK = 1; // Set SCK high..uchar |= MISO; // capture current MISO bitSCK = 0; // ..then set SCK low again}return(uchar); // return read uchar}
前置:微波技術,電磁場與電磁波,HFSS,天線技術等等。
責任編輯:xj
原文標題:從零造單片機需要哪些知識?
文章出處:【微信公眾號:嵌入式ARM】歡迎添加關注!文章轉載請注明出處。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
單片機
+關注
關注
6037文章
44566瀏覽量
636021 -
微機
+關注
關注
0文章
162瀏覽量
28152 -
計算機
+關注
關注
19文章
7511瀏覽量
88096
原文標題:從零造單片機需要哪些知識?
文章出處:【微信號:gh_c472c2199c88,微信公眾號:嵌入式微處理器】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
如何實現51單片機與PC機的串行通信
的詳細步驟和方法。 硬件連接 首先,我們需要將51單片機與PC機的串行接口連接起來。通常,我們使用RS-232接口進行連接。RS-232接口是一種常用的串行通信接口,它使用9個引腳進行數據傳輸。以下是連接
單片機怎么寫入程序
程序通常涉及以下幾個步驟: 選擇單片機和開發環境 : 確定項目需求,選擇合適的單片機型號。 安裝相應的開發環境,如Keil、IAR、MPLAB等。 硬件連接 : 將單片機連接到開發板或
單片機芯片開發-單片機方案開發的關鍵技巧和流程步驟!
復雜而富有挑戰性的任務。今天,英銳恩工程技術小編將為您解鎖單片機開發的關鍵技巧和流程步驟,讓您的項目更加順利!
明確項目需求:
在開始任何開發之前,首先要明確項目的具體需求。這包括功能、性能和環境
發表于 09-26 17:04
單片機基本io功能調試過程
單片機基本IO功能的調試過程涉及多個步驟,旨在確保IO口能夠正確地執行輸入和輸出操作。以下是一個調試過程,涵蓋了從準備階段到實際測試的關鍵步驟: 一、準備階段 確定
單片機燒錄程序的基本步驟是什么
單片機燒錄程序是單片機開發過程中非常重要的一步,它涉及到將編寫好的程序代碼通過一定的方式傳輸到單片機內部的存儲器中,使單片機能夠按照預定的邏輯執行任務。 一、硬件準備
一文讀懂什么單片機:組成結構與應用
歡迎來到單片機的世界,這是一種微小(但功能強大)的設備,改變了嵌入式系統的面貌。在本文中,您將了解單片機的一些基本知識、單片機的結構以及微處理器與單
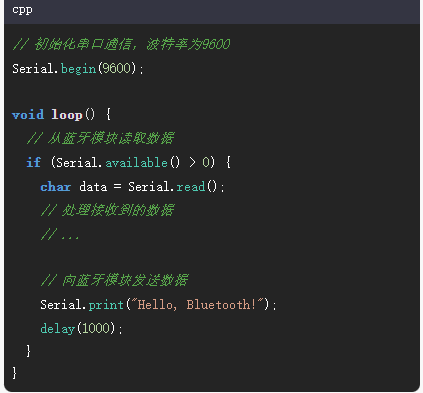
藍牙模塊如何實現單片機和手機端數據互傳
藍牙模塊實現單片機和手機端數據互傳的過程可以分為以下幾個步驟: 硬件準備 : 確保你有一個支持藍牙通信的單片機開發板,如Arduino、Raspberry Pi等。 準備一個兼容的藍牙模塊,如

如何系統、科學地自學單片機?
的自學單片機呢?自學單片機需要一定的計劃和方法,以下是具體的步驟和建議。如何系統、科學地自學單片機?學習電子基礎知識:理解電路原理、數字電子


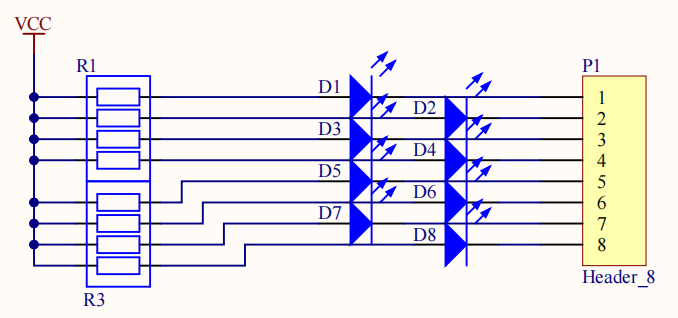
51單片機流水燈制作
?流水燈是學習51單片機的一個基本項目,是我們對單片機IO口輸出認識的基本項目。當然學會了花樣流水燈也很好玩。 下面就分享一種51單片機流水燈制作的方法。 一、流水燈原理圖 二、相關知識
做一個TC23X單片機的Bootloader程序需要準備哪些方面的知識?
各位,問一下,上位機用現成的,做一個TC23X單片機的Bootloader程序需要準備哪些方面的知識?需要看數據手冊的哪些章節?還有能否給一個具體的步驟,感謝。
發表于 02-18 08:33
單片機最小系統的作用 單片機最小系統包含哪幾部分
單片機最小系統是指能夠獨立工作的最基本的硬件組成,也是單片機的必備基礎。它的作用是為單片機提供工作所需的最基本的資源和功能,使單片機能夠正常





 工商網監
工商網監
評論