") 基于單片機(jī)和加速度傳感器實(shí)現(xiàn)運(yùn)動(dòng)員神經(jīng)運(yùn)動(dòng)反應(yīng)系統(tǒng)的設(shè)計(jì)
基于單片機(jī)和加速度傳感器實(shí)現(xiàn)運(yùn)動(dòng)員神經(jīng)運(yùn)動(dòng)反應(yīng)系統(tǒng)的設(shè)計(jì)
反應(yīng)時(shí)是指刺激施于有機(jī)體之后到明顯的反應(yīng)開始時(shí)所需要的時(shí)間,即刺激與反應(yīng)之間的時(shí)間間隔。目前,我國(guó)對(duì)運(yùn)動(dòng)員反應(yīng)能力的測(cè)定大多是通過簡(jiǎn)單的聲光反應(yīng)時(shí)測(cè)定儀,或是計(jì)算機(jī)模擬來(lái)實(shí)現(xiàn)。但是這些測(cè)試方法受外界環(huán)境和人的主觀心理因素影響較大,不能準(zhǔn)確客觀地反映運(yùn)動(dòng)員在運(yùn)動(dòng)中的神經(jīng)反應(yīng)能力。本文實(shí)現(xiàn)了一個(gè)測(cè)量運(yùn)動(dòng)員(聽覺)神經(jīng)-運(yùn)動(dòng)反應(yīng)時(shí)的系統(tǒng),以提高運(yùn)動(dòng)員聽到發(fā)令槍后的起跑速度。該系統(tǒng)是通過聲音傳感器和加速度傳感器檢測(cè)運(yùn)動(dòng)員聽到發(fā)令槍到起跑所需要的時(shí)間,即運(yùn)動(dòng)員的神經(jīng)-運(yùn)動(dòng)反應(yīng)時(shí),再通過無(wú)線數(shù)據(jù)傳輸模塊將數(shù)據(jù)傳送到PC機(jī)進(jìn)行顯示,并可根據(jù)反應(yīng)時(shí)記錄進(jìn)行處理和繪制成反應(yīng)時(shí)曲線,能夠直觀地了解運(yùn)動(dòng)員反應(yīng)時(shí)的變化及趨勢(shì)。
系統(tǒng)結(jié)構(gòu)及其原理
系統(tǒng)結(jié)構(gòu)
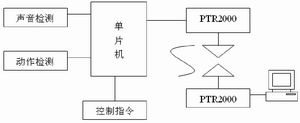
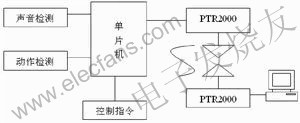
本系統(tǒng)主要實(shí)現(xiàn)(聽覺)神經(jīng)-運(yùn)動(dòng)反應(yīng)時(shí)的測(cè)定。方法是通過聲音傳感器檢測(cè)發(fā)令槍的聲音,用加速度傳感器檢測(cè)運(yùn)動(dòng)員起跑的時(shí)刻,記錄運(yùn)動(dòng)員聽到發(fā)令槍到起跑所需要的時(shí)間,再通過無(wú)線數(shù)據(jù)傳輸模塊將數(shù)據(jù)傳送到基站進(jìn)行記錄和處理。系統(tǒng)由反應(yīng)時(shí)測(cè)定模塊、通信模塊、數(shù)據(jù)記錄處理模塊三部分組成,結(jié)構(gòu)如圖1所示。
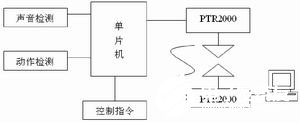
圖1系統(tǒng)結(jié)構(gòu)框圖
反應(yīng)時(shí)測(cè)定模塊用單片機(jī)作為核心部件,加上聲音傳感器和加速度傳感器檢測(cè)電路,通過單片機(jī)的內(nèi)部計(jì)數(shù)器記錄運(yùn)動(dòng)員的起跑反應(yīng)時(shí),并將記錄的數(shù)據(jù)按照一定的格式編碼,通過串口送至無(wú)線發(fā)送模塊,實(shí)現(xiàn)與PC機(jī)的無(wú)線通信。
通信模塊主要用PTR2000無(wú)線數(shù)傳模塊實(shí)現(xiàn)無(wú)線數(shù)據(jù)的傳輸。
數(shù)據(jù)記錄處理模塊通過串行通信的方式接收無(wú)線數(shù)傳模塊傳輸?shù)臄?shù)據(jù),并送到由PC機(jī)構(gòu)成的基站進(jìn)行記錄、處理和顯示。
系統(tǒng)設(shè)計(jì)基本原理
測(cè)量準(zhǔn)備和系統(tǒng)自檢
系統(tǒng)在反應(yīng)時(shí)測(cè)量模塊上設(shè)置了一個(gè)按鈕,在每次測(cè)量前,按此按鈕啟動(dòng)系統(tǒng)自檢,通過單片機(jī)檢查與之相連的各個(gè)部件,如存儲(chǔ)器、加速度傳感器、聲音傳感器等的狀態(tài),以及無(wú)線通信系統(tǒng)能否正常工作。通過無(wú)線傳送模塊,將檢測(cè)到的各個(gè)部件的狀態(tài)發(fā)送到接收端,若接收端接收到正常的信號(hào),則記錄端可以通知開始測(cè)量;若接收不到,則必須檢查、調(diào)試,或者更換測(cè)量系統(tǒng),直到接收端接收到正常的信號(hào)方可開始測(cè)量。
數(shù)據(jù)采集
在系統(tǒng)自檢完成之后,如果各個(gè)部件工作正常,就可以開始測(cè)量反應(yīng)時(shí)。聲音傳感器檢測(cè)到發(fā)令槍的聲音信號(hào)后,計(jì)數(shù)器開始計(jì)數(shù),并查詢加速度傳感器的信號(hào),在檢測(cè)到加速度傳感器信號(hào)后停止計(jì)數(shù),并將計(jì)數(shù)值保存在發(fā)送緩沖區(qū),數(shù)據(jù)采集過程結(jié)束。
數(shù)據(jù)的無(wú)線發(fā)送和接收
在單片機(jī)數(shù)據(jù)采集完成之后,即開始數(shù)據(jù)的無(wú)線發(fā)送。在發(fā)送之前,對(duì)采集的數(shù)據(jù)按照無(wú)線數(shù)傳模塊的要求進(jìn)行編碼,然后將數(shù)據(jù)通過無(wú)線數(shù)傳模塊按照從高位到低位的順序進(jìn)行發(fā)送。在無(wú)線接收端,把接收到的數(shù)據(jù)通過電平轉(zhuǎn)換和RS-232串行接口送至PC機(jī)進(jìn)行處理和顯示。
數(shù)據(jù)的處理和顯示
由PC機(jī)構(gòu)成的基站從RS-232串行接口接收到數(shù)據(jù)后,通過運(yùn)動(dòng)員起跑反應(yīng)時(shí)處理軟件對(duì)數(shù)據(jù)進(jìn)行處理、存儲(chǔ)、顯示和分析。
系統(tǒng)硬件設(shè)計(jì)
從硬件角度看,系統(tǒng)可以分成單片機(jī)模塊、聲音檢測(cè)模塊、運(yùn)動(dòng)檢測(cè)模塊和無(wú)線數(shù)傳模塊等幾部分。
單片機(jī)模塊
在本系統(tǒng)中,考慮到反應(yīng)時(shí)測(cè)量裝置是安裝在運(yùn)動(dòng)員小腿上,對(duì)輸入輸出口的數(shù)量需求不多,因此在選擇單片機(jī)時(shí),應(yīng)選擇體積小、功耗小的作為系統(tǒng)前端數(shù)據(jù)測(cè)量的核心部件,本系統(tǒng)采用的是Atmel公司生產(chǎn)的8位單片機(jī)AT89C2051。
聲音檢測(cè)模塊
聲音檢測(cè)是本系統(tǒng)設(shè)計(jì)中的一個(gè)關(guān)鍵部分,要求具有較好的靈敏度和抗干擾能力。
駐極體傳聲器是一種微型聲電轉(zhuǎn)換器,這種傳聲器具有靈敏度高、頻率響應(yīng)范圍寬和體積小等優(yōu)點(diǎn)。在本系統(tǒng)中選用駐極體話筒作為聲音檢測(cè)部分的聲音傳感器,用其將聲音信號(hào)變換成電信號(hào)。
聲音檢測(cè)模塊設(shè)計(jì)的難點(diǎn)和重點(diǎn)是濾除噪音信號(hào)。在此模塊的設(shè)計(jì)過程中,經(jīng)過多次實(shí)驗(yàn),最終確定了本模塊的電路和相關(guān)參數(shù)。本系統(tǒng)采取幅度比較法實(shí)現(xiàn)聲音檢測(cè)的功能。因?yàn)榘l(fā)令槍的聲音信號(hào)一般幅度較大,可以直接進(jìn)行放大,通過比較器與閾值電壓相比,當(dāng)聲音信號(hào)大于一定幅度時(shí)產(chǎn)生翻轉(zhuǎn)信號(hào)。主要考慮的問題是如何對(duì)駐極體話筒檢測(cè)到的微弱信號(hào)進(jìn)行放大處理。在本系統(tǒng)中采用三極管9013構(gòu)成單級(jí)放大電路對(duì)信號(hào)進(jìn)行放大。經(jīng)過多次實(shí)驗(yàn)發(fā)現(xiàn),輸出電壓大于4V時(shí),聲音信號(hào)振動(dòng)幅度較大。再加上比較電路就構(gòu)成了本系統(tǒng)的聲音檢測(cè)電路,如圖2所示。在此電路中,用R5和R6分壓電路產(chǎn)生一個(gè)閾值電壓,在實(shí)際設(shè)計(jì)中設(shè)置為4V。電壓比較器LM339的OUT2產(chǎn)生聲音信號(hào)自檢電壓,若聲音檢測(cè)無(wú)故障,應(yīng)輸出高電平;OUT1作為聲音檢測(cè)信號(hào)輸出腳與單片機(jī)P1.2口相連,當(dāng)發(fā)令槍響起時(shí)輸出一個(gè)脈沖信號(hào)。
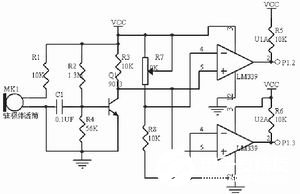
圖2 聲音檢測(cè)電路
運(yùn)動(dòng)檢測(cè)模塊
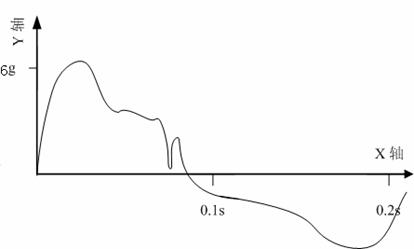
運(yùn)動(dòng)檢測(cè)模塊選用了美國(guó)ADI公司生產(chǎn)的單片加速度傳感器ADXL105作為運(yùn)動(dòng)檢測(cè)傳感器,內(nèi)含加速度傳感器和信號(hào)調(diào)理器。這是一種差容式力平衡加速度傳感器,利用變間隙的方法,把被測(cè)的加速度轉(zhuǎn)換為電容器的電容量變化。內(nèi)部的電容分壓電路,提供與加速度大小成正比的模擬輸出電壓,其相位則取決于加速度的方向,無(wú)需外加任何有源器件即可接到ADC的輸入端。既可以用來(lái)測(cè)量靜態(tài)加速度(如重力加速度或傾角等),又可用來(lái)測(cè)量動(dòng)態(tài)加速度(如振動(dòng)等)。
由于ADXL105可直接輸出模擬信號(hào),因此只需要通過比較器將ADXL105的輸出電壓與閾值電壓相比較,當(dāng)加速度大于某一閾值時(shí)輸出高電平。其原理電路如圖3所示。LM339的OUT3腳輸出運(yùn)動(dòng)檢測(cè)信號(hào),接單片機(jī)的P1.4口;OUT4腳輸出運(yùn)動(dòng)自檢信號(hào),接單片機(jī)的P1.5口。
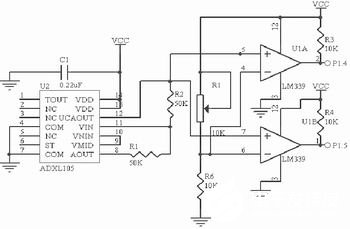
圖3 運(yùn)動(dòng)檢測(cè)模塊電路原理圖
無(wú)線數(shù)傳模塊
本系統(tǒng)中采用基于RF芯片nRF401的無(wú)線數(shù)傳PTR2000模塊。nRF401是NORDIC公司最新推出的單片無(wú)線收發(fā)一體的芯片,包括高頻發(fā)射、高頻接收、PLL合成、FSK調(diào)制、FSK解調(diào)及多頻道切換等部件,是目前集成度最高的一種無(wú)線數(shù)傳芯片。PTR2000既可與80C51、89C2051、68HC08、PIC等各種單片機(jī)的串口或I/O口直接連接,也可通過電平轉(zhuǎn)換芯片MAX232與PC機(jī)進(jìn)行串口通信。
系統(tǒng)軟件設(shè)計(jì)
根據(jù)本系統(tǒng)的設(shè)計(jì)要求,將系統(tǒng)軟件劃分為發(fā)射端軟件和接收端軟件兩部分分別進(jìn)行設(shè)計(jì)。
發(fā)射端軟件
單片機(jī)部分的軟件主要可以分為以下幾個(gè)模塊:自檢模塊、發(fā)射模塊和計(jì)時(shí)模塊。單片機(jī)主程序流程圖如圖4所示。
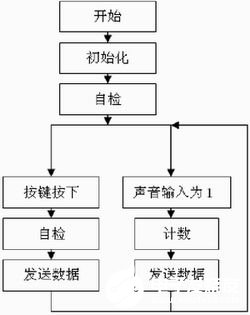
圖4 單片機(jī)端主程序流程圖
接收端軟件
在本系統(tǒng)中接收端為PC機(jī),采用VB語(yǔ)言進(jìn)行編程。在標(biāo)準(zhǔn)RS-232串口通信方面,VB提供了具有強(qiáng)大功能的通信控件Mscomm。該控件可設(shè)置串行通信的數(shù)據(jù)發(fā)送和接收,對(duì)串口狀態(tài)及串口通信的信息格式和協(xié)議進(jìn)行設(shè)置。這是一個(gè)標(biāo)準(zhǔn)的10位串口通信,包括8位數(shù)據(jù)、1位起始位和1位停止位。在發(fā)送或接收數(shù)據(jù)過程中觸發(fā)OnComm事件,通過編程訪問CommEvent的屬性了解通信事件的類型,進(jìn)行各自的處理。每個(gè)通信控件對(duì)應(yīng)一個(gè)串口,可以設(shè)計(jì)多個(gè)通信控件來(lái)訪問多個(gè)通信口。控件提供了功能完善的串口數(shù)據(jù)的發(fā)送和接收功能,Mscomm控件具有兩種處理方式:事件驅(qū)動(dòng)方式,由Mscomm控件的OnComm事件捕獲并處理通信錯(cuò)誤及事件;查詢方式,通過檢查CommEvent屬性的值來(lái)判斷事件和錯(cuò)誤。在本系統(tǒng)中采用的是事件驅(qū)動(dòng)方式。
通過VB編程工具強(qiáng)大的圖形編程方法,可以實(shí)現(xiàn)運(yùn)動(dòng)員反應(yīng)曲線圖的繪制。并可對(duì)圖形進(jìn)行放大、縮小以及移動(dòng),方便地顯示出運(yùn)動(dòng)員反應(yīng)時(shí)的變化趨勢(shì)。基于以上各個(gè)程序模塊的設(shè)計(jì),本軟件實(shí)現(xiàn)了對(duì)數(shù)據(jù)的實(shí)時(shí)采集與發(fā)射/接收以及穩(wěn)定顯示,使得整個(gè)系統(tǒng)具有很高的實(shí)用價(jià)值。
結(jié)語(yǔ)
通過測(cè)試,系統(tǒng)的最小分辨率為2ms,測(cè)量范圍是0“18.2s,傳輸距離≥10米,數(shù)據(jù)傳輸速率≥1200 bps,工作溫度范圍是-25℃”40℃,工作電壓為DC 5V±10%,測(cè)量模塊用干電池或可充電電池供電。
本測(cè)量系統(tǒng)采用的方法在國(guó)內(nèi)處于領(lǐng)先水平,與之前的起跑反應(yīng)時(shí)模擬測(cè)定儀相比,不但可以在運(yùn)動(dòng)場(chǎng)上直接、精確地測(cè)定運(yùn)動(dòng)員的起跑反應(yīng)時(shí),而且可以對(duì)反應(yīng)時(shí)進(jìn)行分析和綜合,促進(jìn)對(duì)運(yùn)動(dòng)員反應(yīng)時(shí)的研究以及提高運(yùn)動(dòng)員的訓(xùn)練水平,為運(yùn)動(dòng)員的選材和訓(xùn)練提供科學(xué)的參考依據(jù)。
責(zé)任編輯:gt
-
傳感器
+關(guān)注
關(guān)注
2552文章
51217瀏覽量
754611 -
單片機(jī)
+關(guān)注
關(guān)注
6039文章
44575瀏覽量
636395 -
無(wú)線
+關(guān)注
關(guān)注
31文章
5459瀏覽量
173470
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
Swimovate新型運(yùn)動(dòng)手表中內(nèi)置加速度傳感器
測(cè)運(yùn)動(dòng)軌跡選什么傳感器
運(yùn)動(dòng)背后的科技力量,ADI inside科技創(chuàng)新盤點(diǎn)
加速度傳感器的原理
加速度傳感器原理
如何測(cè)量汽車剎車踏板的位移和加速度
怎么用加速度傳感器測(cè)量運(yùn)動(dòng)員測(cè)速?
智能小車上的速度碼盤和加速度傳感器可以得到小車的運(yùn)動(dòng)軌跡嗎
基于HarmonyOS開發(fā)的運(yùn)動(dòng)員智能訓(xùn)練系統(tǒng)
運(yùn)動(dòng)員起跑反應(yīng)時(shí)無(wú)線測(cè)量系統(tǒng)的研究和實(shí)現(xiàn)
快速肢體運(yùn)動(dòng)測(cè)量模塊設(shè)計(jì)與實(shí)現(xiàn)
什么是加速度傳感器
運(yùn)動(dòng)員(聽覺)神經(jīng)-運(yùn)動(dòng)反應(yīng)時(shí)的測(cè)量系統(tǒng)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論