 曠視談移動機器人的未來
曠視談移動機器人的未來
單體智能是單個機器人的智能化程度,未來會包含更多AI的元素;群體智能是系統的智能化,通過AI的算法使系統最優化,為客戶降本增效。
編者按:
正如德國工業4.0之父孔翰寧曾指出的“人工智能是工業4.0成敗的關鍵”,隨著人工智能技術的發展,工業智能成為了不少AI企業關注的焦點。在這之中,作為工業智能化一大標志的工業機器人是發展落地的重點之一。
曠視在2017年進入供應鏈物聯網領域,聚焦智慧物流及工業機器人業務。2020年初,機器人產品部獨立成為曠視的產品中臺之一,專注于機器人產品和關鍵物流裝備的研發。在2021年到來之際,曠視高級副總裁兼機器人產品部總經理王宏玉、曠視機器人產品部研發總監陶濤發表署名文章,分享了他們對移動機器人技術趨勢的觀點。
近年來,隨著消費需求日趨個性化、用工短缺/勞動力成本上升、新一代信息技術不斷成熟等多重因素的推動,智慧物流、智能制造成為企業降本增效提質的重要手段,帶動移動機器人市場需求的持續走高。根據中國移動機器人產業聯盟、新戰略機器人產業研究所數據統計,2019年度中國移動機器人市場規模達到61.75億元。
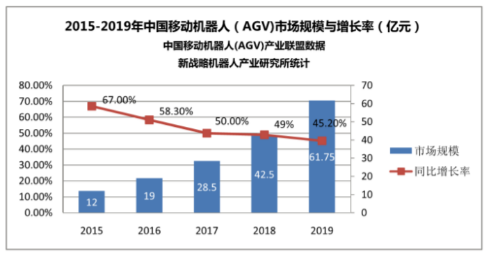
圖:2019年度中國移動機器人市場規模達到61.75億元(來源:中國移動機器人產業聯盟《2019-2020 中國移動機器人(AGV)產業發展研究報告》)
移動機器人主要需要解決定位、規劃、控制等問題,目前重點的研究領域包括環境感知與建模、定位與導航、環境理解、多機器人協調等,根據曠視在工業智能及智慧物流方面的研發和實踐積累,我們看到移動機器人目前主要有以下五大發展趨勢。
一、基于SLAM技術的AMR是未來移動機器人的主流趨勢。移動機器人發展經歷了有軌方式(如磁帶牽引方式)、信標方式(如二維碼)、無信標方式(如SLAM:Simultaneous Localization and Mapping,即時定位與地圖構建)的不同階段。
二維碼導航機器人需要在現場張貼二維碼,對二維碼粘貼精度要求高,且易損壞。SLAM技術可以讓機器人在無信標的情況下也能實現定位導航,具有易部署、柔性等特點,更加適合在運行環境復雜、業務經常變動的場景下應用,因此受到越來越多客戶青睞,正在成為業界主流趨勢。
行業發展顯示,導航技術的發展使設備從“車”逐漸過渡到“機器人”。AGV(Automated Guided Vehicle,自動引導車)最早是傳統企業自動導引車的模式,智能化程度不高。隨著新技術的發展,AGV自主化、智能化的程度越來越高,企業紛紛朝著AMR(Automated Mobile Robot,自主移動機器人)的方向發展,越多越多人開始用AMR來取代AGV的說法。
二、視覺SLAM是未來方向,同時需要多傳感器融合的導航方式。在工業物流領域,基于SLAM技術實現的機器人自主導航,根據傳感器不同主要分為兩個類別:激光SLAM和視覺SLAM。激光SLAM技術相對更加成熟,是當前市場應用的主流。
但隨著機器人單體主處理器的處理能力提升,特別是一些帶GPU(Graphics Processing Unit,圖形處理器)、NPU(Neural-network Processing Unit,嵌入式神經網絡處理器)的處理器的應用,機器人視覺處理能力得到極大提升,以深度學習技術為核心的視覺處理可以在機器人上實現。 目前,視覺技術已經被廣泛地應用到機器人立體視覺避障(人/ 物區分識別),以及視覺導航和末端高精定位上。曠視認為,視覺傳感器成本低,感知信息量大,隨著視覺算法技術的成熟,視覺SLAM導航機器人在不遠的將來會替代激光SLAM導航機器人。
圖:曠視MegBot-S800V視覺建圖及視覺導航演示
與此同時,不管是基于激光還是視覺實現的機器人自主導航,都不是單一應用,還需要融合諸如慣導(IMU)、GPS等其他導航方式,以應對魯棒性要求非常高的現實應用場景,讓機器人能夠更加穩定有效地運行。(出處:中國移動機器人(AGV/AMR)產業聯盟《2020-2021工業制造領域自然導航AGV/AMR產業發展研究報告》)例如視覺和IMU的融合,IMU為快速運動提供了較好的解決方式,而相機又能在慢速運動下解決IMU的漂移問題,二者實現了優勢互補。
三、深度學習將廣泛應用,加強機器人對周圍環境的理解。AI中的深度學習技術在計算機視覺中的應用主要有物體識別、目標檢測與跟蹤、語義分割、實例分割等,語義SLAM能把物體識別與視覺SLAM結合起來,將標簽信息引入優化過程中,構建帶物體標簽的地圖,實現機器人對周圍環境內容的理解。
移動機器人的自主性主要體現在“狀態感知”、“實時決策”、“準確執行”這三個方面。物聯網、AI、5G等新一代信息技術與機器人技術相互結合,能夠讓設備高效交互,數據更加自由流動,并通過算法指揮硬件發揮最大效能。(出處:中國移動機器人(AGV/AMR)產業聯盟《2020-2021工業制造領域自然導航AGV/AMR產業發展研究報告》)
四、機器人規模化集群作業成為發展必然,需要更高效的多機協作方式。機器人在實際應用中,通常是以集群的方式協同完成特定的任務。如:月臺的托盤搬運集貨,原材料的料箱存儲和揀選,產線之間的物料搬運;托盤可以使用無人叉車搬運,原材料的存儲揀選可以使用二維碼類KIVA機器人,產線之間物料搬運可以使用SLAM機器人。
在曠視看來,多臺甚至是成百上千臺機器人規模化集群作業成為發展必然。這不僅需要調度系統需要能夠接入各種類型的機器人,在統一的環境下完成作業調度;還需要多機器人調度算法,找到全局最優方案,使多機器人共同工作時的總效率最高。目前調度算法主要分為三類:數學方法、仿真方法和人工智能算法。其中,人工智能算法前景最為遠大。
例如,當系統只需要調度幾十臺機器人時,傳統系統依靠簡單的邏輯策略就能支持。然而,一旦達到幾百臺甚至上千臺機器人時,簡單的邏輯思考已經不能解決問題,整個群體協作的效率無法得到有效保證。這時候就需要機器人能夠不斷學習、不斷修正自身策略,AI將在其中扮演重要角色,讓整個系統不斷優化,群體智能化程度越來越高。
五、同構仿真、數字孿生,為客戶提供一站式服務。客戶在做智能化、自動化改造的過程中,從方案設想,到方案設計和實際投入,中間會經過漫長的決策鏈,通常這個決策過程依賴設計人員的經驗,這樣可能會導致規劃結果和實際需求產生較大的偏差,導致浪費或工期延誤。 一套功能完備的同構仿真系統可以避免設計過程中的人為偏差,并且能夠極大提高評估效率。例如曠視自主研發的機器人網絡操作系統河圖(HETU),可以提供規劃、仿真、實施、運營等一站式解決方案,實現同構仿真和數字孿生,極大減少機器人項目規劃風險,提高運維效率。
數字孿生中最關鍵的在于仿真,而仿真里關鍵的是同構仿真。目前物流行業中,大多數仿真系統和執行系統都是分開的。而曠視河圖采用同構仿真的方式,仿真和執行在同一套系統和軟件里,仿得更好、更加體系化,隨著軟件的更新迭代可以無限逼近現實場景,帶來更大的價值。
在曠視看來,移動機器人未來的主要技術發展趨勢可以概括為單體智能和群體智能:單體智能是單個機器人的智能化程度,未來會包含更多AI的元素;群體智能是系統的智能化,通過AI的算法使系統最優化,為客戶降本增效。移動機器人的市場很快就會突破100億的規模,未來的市場是1000億的體量,國內的很多同仁在為這個市場而努力拼搏,曠視的產品也在不斷走向海外,在海外這個藍海市場贏得一席之地。
責任編輯:xj
原文標題:曠視談移動機器人的未來:單體智能+群體智能
文章出處:【微信公眾號:新戰略機器人】歡迎添加關注!文章轉載請注明出處。
-
智能
+關注
關注
8文章
1714瀏覽量
117624 -
移動機器人
+關注
關注
2文章
764瀏覽量
33600 -
曠視科技
+關注
關注
1文章
153瀏覽量
11205
原文標題:曠視談移動機器人的未來:單體智能+群體智能
文章出處:【微信號:robotinside2014,微信公眾號:移動機器人產業聯盟】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
移動機器人核心科技解碼:導航、感知與掌控力的深度剖析
思嵐科技榮獲雙年度移動機器人優質供應鏈獎
移動機器人的技術突破和未來展望

智能移動機器人系統方案指南

新松移動機器人批量進軍歐洲新能源市場
智能移動機器人

如何借助恩智浦MCX系列MCU糾錯功能,打造可靠安全的移動機器人?

智能移動機器人系統的用途和市場趨勢
移動機器人四大賦能技術及NXP解決方案,本文總結全了!
海康機器人第100000臺移動機器人下線
機械臂和移動機器人兩種控制系統方案對比

自主移動機器人(AMR)功能和特點

移動機器人幕后的全能冠軍——MRC5000

2023年國外移動機器人行業融資收購情況






 工商網監
工商網監
評論